

КР ТОАТ над ошибками
.docx


τ = 0,08 Т = 0,06
Динамическим коэффициентом усиления называется величина, показывающая во сколько раз данное звено усиливает входной сигнал ( в установившемся режиме), и равная отношению величины технологического параметра Хуст в установившемся режиме к выходной величине Y.
Xуст = 2
Y = 1
K
=
 =
=

Для регулятора ПИ с минимум средней квадратичной ошибки:
Kp
=

Tup = To,
где Kp - статический коэффициент передачи регулятора;
Tup- время изодрома регулятора;
Ko, To, τo - статический коэффициент передачи, замедление отклика и постоянная времени объекта регулирования соответственно.
Kp
=
 = 0,375
= 0,375
Tup = 0,06
Пусть q – вероятность искажения одного разряда (одного элемента кода), а P, Q – вероятности правильного и не правильного приема кодового слова, тогда:
P
=
 =
=
 = 0,9999996
= 0,9999996
Q
= 1 – P
= 1 – 0,9999996 = 4 ·

Q
= n
∙ q
= 8 ∙ 0,05 ·
 = 0,4 ·
= 0,4 ·

Вывод: Вероятность возникновения ошибки при передачи сообщения обыкновенным кодом линейно возрастает с увеличением длины кода. Таким образом, чем больше информации необходимо передать, тем менее надежно она передается.

Рис.16 Модель регулятора.
В качестве примера приведена модель ПИ-регулятора.
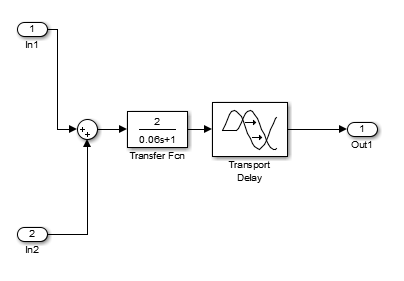
Рис.17 Модель объекта регулирования.
В соответствии с указанной формулой для 8-миразрядного кода запишем выражения для определения значения разрядов его контрольной части, аналитические выражения для определения значений синдрома декодирующим устройством для данного кода имеют вид:

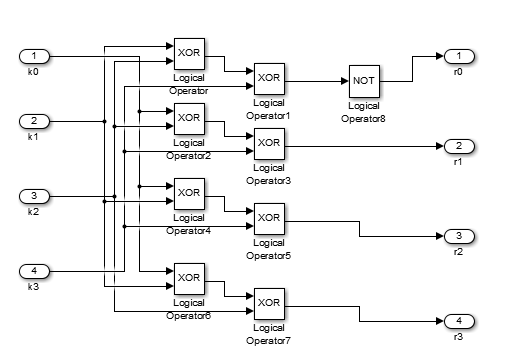
Рис.5 Модель кодера.
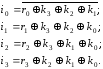
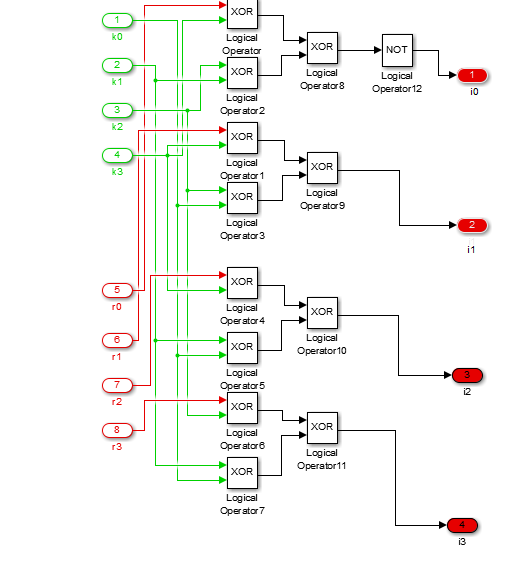
Рис.10 Модель блока Decoder_inverse_code.
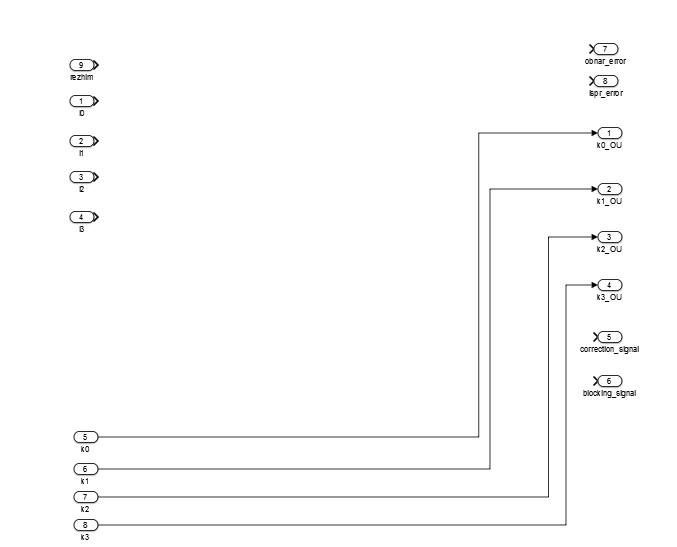
Рис.12 Модель блока Keys.
Показания осциллографа :
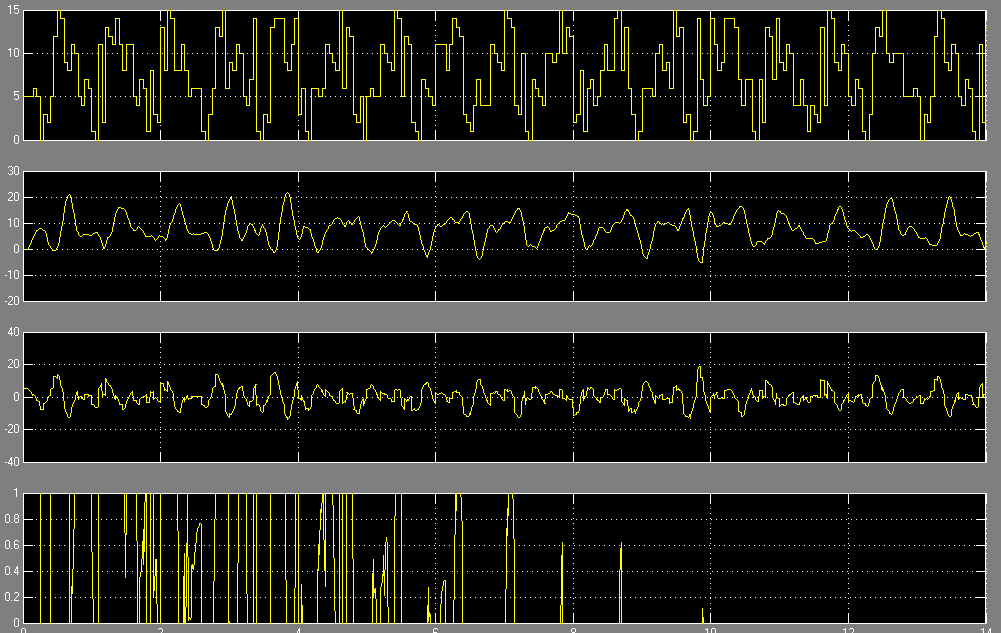
Рис.1 Общий вид автоматического регулирования с передачей уставок по телемеханическому каналу связи.
Расчет показателей качества.
|
Кратность необнаруженной трансформации |
Кол-во необнаруженной информации в 2 коде |
Кол-во необнаруженной информации в 10 коде |
|
1 |
000000002 |
010 |
|
2 |
000101102 |
2210 |
|
3 |
001110002 |
5610 |
|
4 |
010001012 |
6910 |
|
5 |
001110002 |
5610 |
|
6 |
000111002 |
2810 |
|
7 |
000010002 |
810 |
|
8 |
000000012 |
110 |
Вероятность правильного и неправильного приёма кодового слова.
Рпр = (1- 0,05)8 = 0,663
Вероятность искажения кратностей.
Pi = Ni · (1- q)n-I · qi
P1 = 0 · (1 – 0,05)7 · 0,051 = 0
P2 = 22 · (1 – 0,05)6 · 0,052 = 0,04
P3 = 56 · (1 – 0,05)5 · 0,053 = 0,0054
P4 = 69 · (1 – 0,05)4 · 0,054 = 0,00035
P5 = 56 · (1 – 0,05)3 · 0,055 = 0,000015
P6 = 28 · (1 – 0,05)2 · 0,056 = 0,00000038
P7 = 8 · (1 – 0,05)1 · 0,057 = 0
P8 = 1 · (1 – 0,05)8 · 0,058 = 0
Вероятность необнаружения трансформации.
Рнт = ∑Рi = 0+0,04+0,0054+0,00035+0,000015+0,00000038+0+0=0,04576538
Вероятность обнаружения трансформации.
Рот = 1 – Рпр – Рнт = 1- 0,663 – 0,04576538 = 0,29123462
Характеристики системы регулирования.
|
Помехозащищенный код |
Модифицированный код Бауэра |
|
Режим работы регулятора |
Исправление ошибок |
|
Вероятность искажения символа |
0,05 |
|
Минимальное кодовое расстояние |
4 |
|
Вероятность правильной передачи сообщения |
0,663 |
|
Вероятность обнаружения трансформации |
0,29 |
|
Вероятность необнаружения трансформации |
0,04576538 |
|
Тип регулятора |
ПИ |
|
Типовой процесс |
С минимумом средней квадратичной ошибки 40% перерегулированием |
|
Время регулирования |
9,8 с |
|
Максимальное абсолютное отклонение |
0,5 |
|
Максимальное относительное отклонение |
50% |