

Оглавление.
Задание на курсовой проект……………………………………………………...3
Исходные данные для выполнения курсового проекта………………………...4
Описание шаблона модели……………………………………………….. …….5
Учебно-методическое обеспечение…………………………………………….24
Задание на курсовой проект.
1. Разработать устройства организации телемеханического канала связи
между пунктом управления и объектом управления, осуществить их
настройку и исследовать их характеристики. Для этого:
– синтезировать структурные схемы кодирующего и декодирующего
устройства для передачи сообщений по телемеханическому каналу в
заданном помехозащищенном коде;
– разработать модели канала связи с возможностью имитации ошибок при
передаче данных, а также анализатора, для оценки достоверности передачи
данных при наличии ошибок;
– рассчитать корректирующие способности заданного помехозащитного кода
и оценить достоверность передачи данных при известной вероятности
одиночных искажений символов.
2. Для объекта управления с заданными характеристиками разработать
структурную схему системы автоматического регулирования замкнутого
типа, осуществить её настройку и анализ качества регулирования. Для этого:
– по кривой разгона определить характеристики объекта управления;
– выбрать тип регулятора и настроить его параметры для обеспечения
заданных показателей качества переходного процесса, снять и
проанализировать характеристики процесса регулирования.
3. Синтезировать модель передачи уставок параметров технологического
процесса по заданной программе и получить график процесса регулирования
при отсутствии искажений в канале связи;
4. Сформировать перечень технических характеристик разработанной
системы.
5. Сформулировать выводы по работе.
Исходные данные для выполнения курсового проекта.
– количество передаваемых уставок по телемеханическому каналу связи – 16;
– в случае обнаружения ошибок в принимаемом сообщении должна
использоваться уставка с десятичным номером «0»;
– используемый для передачи сообщений помехозащитный код – модифицированный код Бауэра, режим работы декодирующего устройства - обнаружение и исправление ошибок
– вероятности искажения одиночных символов в канале связи – 0,05;
– характеристики помехозащитных кодов: количество различных сообщений – 16, общее количество символов в сообщении – 8, минимальное кодовое расстояние – 4;
– время моделирования равно 12.8 сек, максимальный шаг моделирования равен 0.01 сек;
– программа изменения уставок заданного параметра технологического процесса - [5555533333222];
– тип регулятора – ПИ;
– типовой переходной процесс с минимумом средней квадратичной ошибки;
– кривая разгона объекта регулирования:

– закон изменения возмущения во времени - линейно возрастающий сигнал с коэффициентом наклона линии 1.
Описание шаблона модели.
С целью упрощения процесса разработки модели системы автоматического регулирования с передачей уставок по телемеханическому каналу связи, студентам предлагается воспользоваться готовым шаблоном. В шаблоне уже разработана общая структура системы. Также в него уже включены модели отдельных общих для всех вариантов узлов, включая ряд вспомогательных, в состав системы автоматического регулирования не входящих, но необходимых для моделирования и автоматизированного сбора сведений о ее работе. Процесс разработки модели системы автоматического регулирования при использовании данного шаблона заключается в его изучении, анализе и корректном дополнении моделями отдельных не проработанных узлов.
Модель, представленная в шаблоне, является иерархической, построенной в соответствии с системным подходом. Результатом такого подхода является то, что реализация многих элементов модели подчиняется «принципу матрешки», когда элемент обозначен в схеме в общем виде на одном уровне описания, а его реализация раскрыта на других уровнях. Для удобства студента, элементы модели, которые требуется редактировать, а также основные индикаторы выделены цветом и падающей тенью. Для того, чтобы модель заработала необходимо изучить устройство существующих элементов и правильно реализовать структурную схему элементов выделенных цветом и падающей тенью. Общий вид системы автоматического регулирования с передачей уставок по телемеханическому каналу связи представлен на рисунке 1.
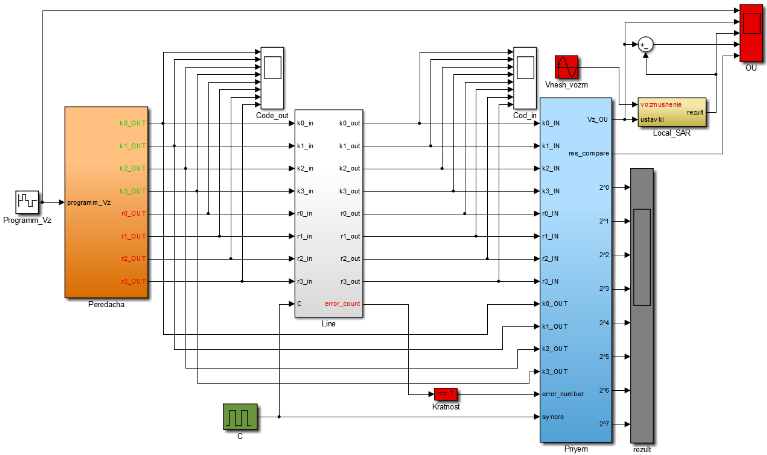 Рис.
1. Общий вид системы автоматического
регулирования с передачей уставок по
телемеханическому каналу связи.
Рис.
1. Общий вид системы автоматического
регулирования с передачей уставок по
телемеханическому каналу связи.
На рисунке следует выделить следующие управляющие элементы и элементы индикации:
– Управляющие элементы:
Programm_Vz – задатчик, в котором должна быть записана программа изменения уставок во времени;
Peredacha – модель передающей стороны системы телемеханики (поста управления);
Line – модель канала связи;
Priyem – модель приемной стороны системы телемеханики (линейного пункта);
Local_SAR – модель локальной системы автоматического регулирования технологического параметра;