

3. Исследование динамической нагруженности машины в установившемся режиме движения
3.1. Структурный анализ рычажного механизма
Целью структурного анализа механизма является определение формулы строения механизма и классификация входящих в его состав структурных групп, так как формула строения определяет порядок выполнения кинематического и силового расчетов, а классы структурных групп - методы расчетов.
Структурная схема основного исполнительного механизма изображена на рис. 3.1. Число подвижных звеньев п = 3. Число низших кинематических пар pH=4, в том числе вращательные пары - 0(1,0 ), А(1,2), В(2,3), поступательная пара В(3,0),. Число высших кинематических пар Рв =0 • Число степеней свободы механизма
W=3n-2pH-pВ=3·3-2•4-0=1
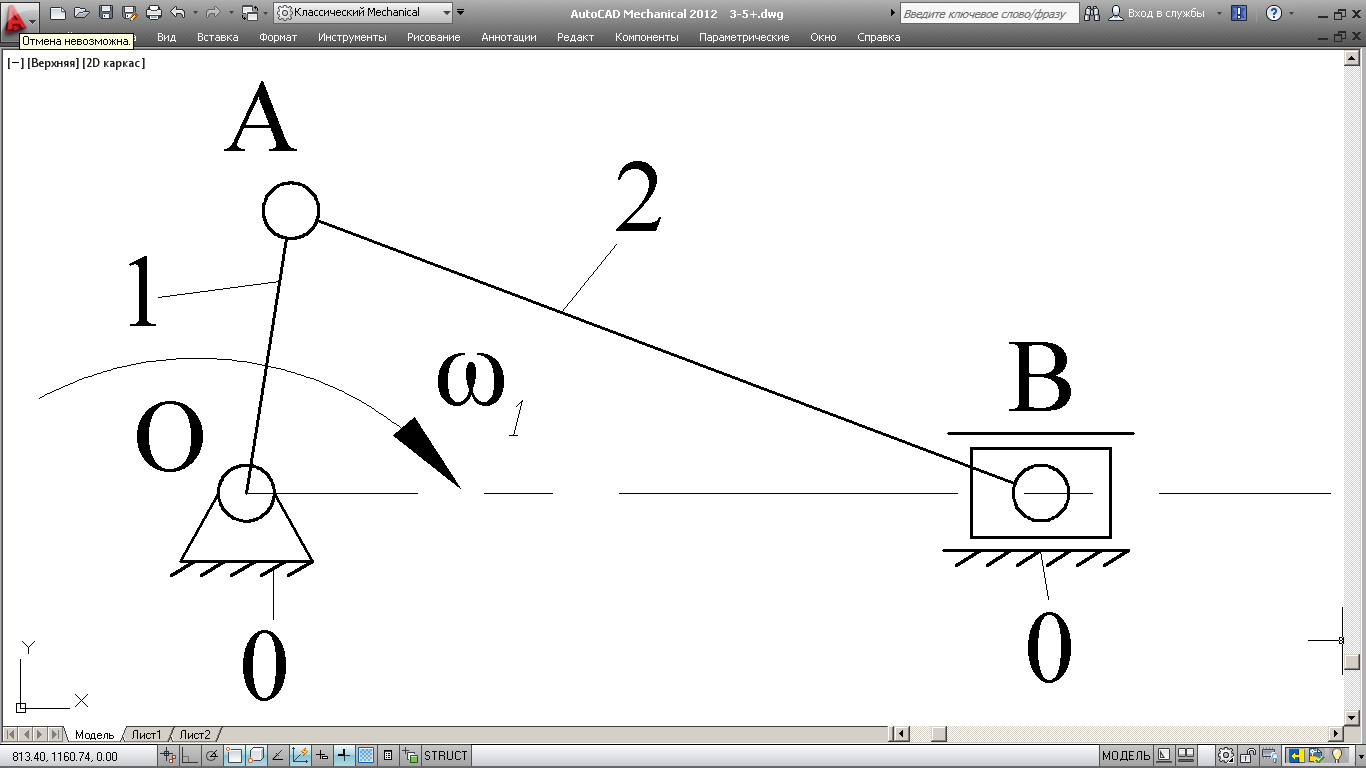
Рисунок.3.1
Таким образом, для того
чтобы все звенья механизма совершали
однозначно определенные движения,
необходимо задать движение одному звену
- в данном случае кривошипу 1. Тогда
угловая координата кривошипа
 является обобщенной координатой
механизма, а кривошип - начальным звеном.
является обобщенной координатой
механизма, а кривошип - начальным звеном.
Данный механизм образован последовательным присоединением к механизму 1-го класса (кривошипу 1 и стойке 0) структурной группы (2, 3) (рис. 3.2).
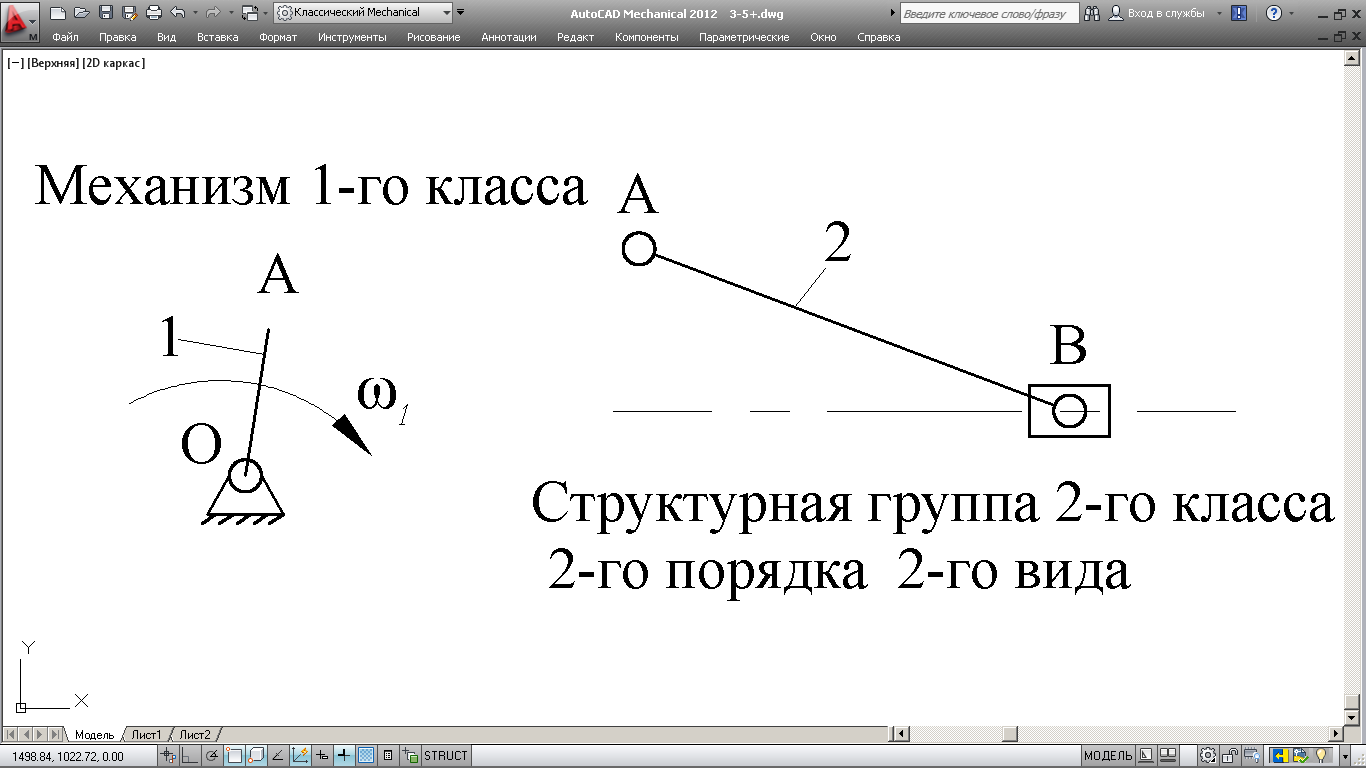
Рисунок.3.2
Формула строения механизма I(0,1)→II (2,3). Так как группа 2-го класса, то механизм относится ко 2-му классу.
Таким образом, кинематический анализ начинается с механизма I (0,1), а заканчивается группой II (2,3). Силовой расчёт выполняется в обратной последовательности II (2,3) → I (0,1).
3.2. Определение кинематических характеристик рычажного механизма методом планов
3.2.1.1 Определение размеров и параметров рычажного механизма
В соответствии с исходными данными входными параметрами синтеза рычажного механизма являются:
Угловой поворот кривошипа,
соответствующий ходу высадки

Ход ползуна при высадке

Отношение длин шатуна к длине кривошипа

Отношение расстояния от точки А до
центра тяжести шатуна к длине шатуна
Координата центра тяжести ползуна

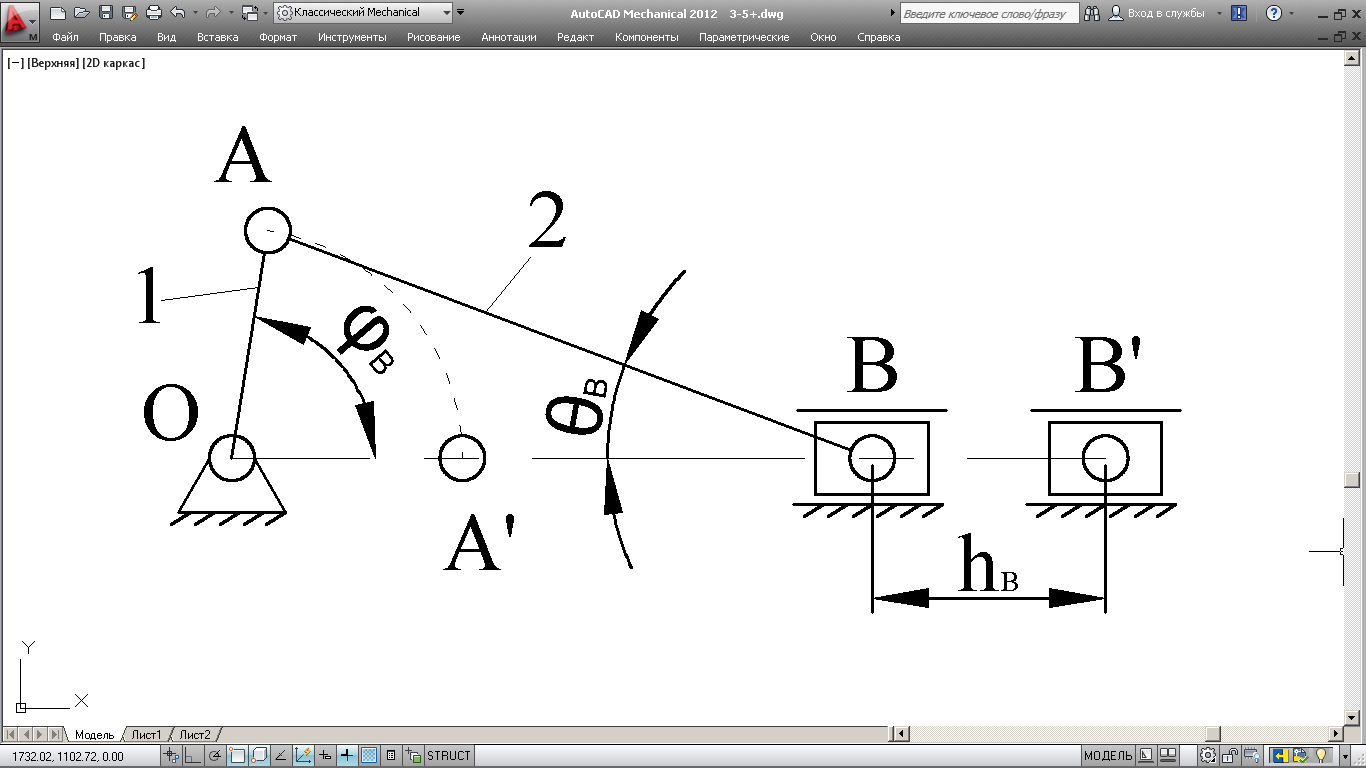
Рисунок.3.3
Обознасим длину звена 1 -
 , а звена 2 -
, а звена 2 - .
.
Рассчитаем длину звена 1 по формуле:
Где


Тогда
 :
:

3.2.1.2 Построение планов положений механизма
Для построения планов выбираем масштабный коэффициент μl=0,0005м/мм.
Тогда чертежные размеры рычажного механизма будут равны
OA= l1/ μl=0,052/0,0005=104 мм;
AB= l2/ μl=0,1465/0,0005=293мм;
AS2=0,357АВ= 0,357·АВ =104.6 мм;
BS3= lBB3/ μl=0,12/0,0005=240мм;
По полученным чертежным размерам строим 12 планов положений механизма
Построение планов положений выполняется методом засечек, начиная с крайнего правого положения ползуна 3, через 30˚ по углу поворота кривошипа ОА.
Для построения крайнего правого положения 1 из точки О проводим окружность радиусом ОА. Затем из точки O делаем засечку радиусом r = OA + AB на траектории точки B и получаем точку B1. В месте пересечения прямой ОВ с окружностью ОА получаем А1.
Крайнее левое положение 7 находим дополнительно. Для его построения из точки O делаем засечку радиусом r = АВ - ОА на траектории точки B и получаем точку B7. Через точки B7' и О проводим прямую линию и получаем тоуки А7 .Точку S2 строим на АВ, Отступив 0,333АВ от точки А.
В данном случае положение 7 можно было не строить, так как оно получается при разбиении через 30˚ по углу поворота кривошипа ОА всего цикла.