

Получение косоугольных проекций
Рассмотрим теперь косоугольную проекцию (рис. 10.3.), матрица может быть записана исходя из значенийиl.
Проекцией точки P(0,0,1) является точкаP(l cos,lsin, 0), принадлежащая плоскостиxy. Направление проецирования совпадает с отрезкомРР, проходящим через две эти точки. Это направление естьР-Р= (lcos,lsin, -1). Направление проецирования составляет уголс плоскостьюxy.
Теперь рассмотрим проекцию точки x, y, zи определим ее косоугольную проекцию (xp yp) на плоскостиxy:
xp = x + z(lcos);
yp = y + z(lsin).
Таким образом, матрица 44, которая выполняет эти действия и, следовательно, описывает косоугольную проекцию, имеет вид
Мкос= .
.
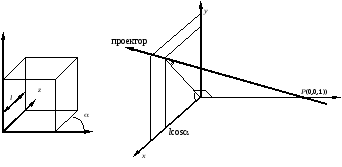 Рис.
10.3. Косоугольные проекции
Рис.
10.3. Косоугольные проекции
Применение матрицы Мкос приводит к сдвигу и последующему проецированию объекта: плоскости с постоянной координатойz = z1переносятся в направленииx наz1 l cosи в направленииy наz1 l sinи затем проецируется на плоскостьz = 0. Сдвиг сохраняет параллельность прямых, а также углы и расстояния в плоскостях, параллельных осиz.
Для проекции Кавалье l = 1, поэтому угол = 45. Для проекции Кабинеl=½, а= arctg(2) = 63,4. В случае ортографической проекцииl = 0 и= 90, поэтому матрица ортографического проецирования является частным случаем косоугольной проекции.
Построение вида спереди
Получение вида спереди возможно также с помощью матрицы 4x4, которая имеет следующий вид
Морт= .
.
Как видим, третий столбец матрицы полностью обращает zкоординату в ноль.
Программная реализация
Программная реализация данной лабораторной весьма похожа на реализацию преобразований на плоскости. Дополнительно описываются матрица для получений проекций и матрица для хранения двухмерного представления.
Вычислительный процесс, запускаемый при нажатии на какую либо кнопку, приведен на рис. 10.4.
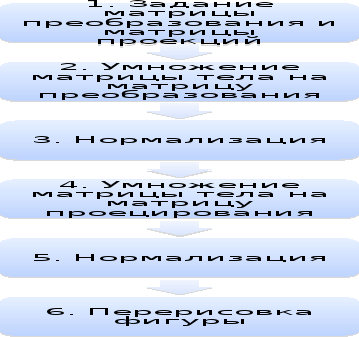
Рис. 10.4. Процесс визуализации трехмерного тела
На четвертом этапе, при умножении на матрицу проецирования, исходная матрица тела не должна меняться, поскольку в этом случае будет потеряна информация о координате z. Поэтому результат умножения на этом этапе сохраняется в специальной матрице, по которой и происходит отрисовка.
Задание по лабораторной работе
Реализовать с заданным телом все виды преобразований в пространстве: перенос вдоль координатных осей, отражение относительно основных плоскостей, масштабирование, поворот на заданные углы относительно координатных осей. Предусмотреть восстановление исходной позиции тела. Реализовать получение следующих проекций: вид спереди, центральной одноточечной, косоугольной. Управление организовать как через интерфейсные элементы (меню, кнопки, строки редактирования и пр.), так и через «горячие» клавиши.
Варианты заданий
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задание №22 |
|
|
 Задание
№1
Задание
№1  Задание
№2
Задание
№2  Задание
№3
Задание
№3  Задание
№4
Задание
№4  Задание
№5
Задание
№5  Задание
№6
Задание
№6  Задание
№7
Задание
№7  Задание
№8
Задание
№8  Задание
№9
Задание
№9  Задание
№10
Задание
№10  Задание
№11
Задание
№11  Задание
№12
Задание
№12  Задание
№13
Задание
№13  Задание
№14
Задание
№14  Задание
№15
Задание
№15  Задание
№16
Задание
№16 Задание
№17
Задание
№17  Задание
№18
Задание
№18  Задание
№19
Задание
№19  Задание
№20
Задание
№20  Задание
№21
Задание
№21 
 Задание
№23
Задание
№23  Задание
№24
Задание
№24