

1. Исходные данные
Дана системы регулирования с ПИ- регулятором и объектом регулирования с передаточной функцией
 .
.
Параметры передаточной функции объекта, требования к запасу устойчивости системы, критерий оптимальной настройки приведены в таблице 1.
Таблица 1 – Исходные данные по варианту
|
Номер варианта |
K |
n |
T |
ψ |
I |
|
44 |
0,7 |
2 |
70 |
0,75 |
I1 |
|
| |||||
|
Обозначения: K – коэффициент передачи объекта; τ – запаздывание объекта; Ti – i-я постоянная времени объекта; n – порядок объекта; ψ – требуемая степень затухания переходных процессов в системе; I – заданный интегральный критерий качества работы системы
| |||||
 (c);
(c);
 (c);
(c);
 ;
;
2. Структурная схема одноконтурной аср
Структурная схема системы регулирования, приведенная в задании, имеет вид:
y









s
ε
WP(P)
Wоб(P)

f

Рисунок 1 – Структурная схема заданной системы регулирования
Учитывая исходные данные, приведенные ранее структурную схему системы регулирования можно преобразовать к виду:

f




y
ε
s












Рисунок 2 – Преобразованная структурная схема заданной системы регулирования
3. Расчёт и построение границы заданного запаса устойчивости аср
Для расчёта и построения границы заданного запаса устойчивости АСР с ПИ-регулятором, представленной на рисунке 1, воспользуемся корневым методом параметрического синтеза систем автоматического регулирования с применением расширенных амплитудно-фазовых частотных характеристик (РАФЧХ).
Используя исходные
данные, приведенные в таблице 1, можем
записать, что для заданной системы
регулирования установлены следующие
требования к запасу устойчивости
системы: степень затухания переходного
процесса в системе
 .
.
Исходя из этого, зная зависимость между степенью затухания переходных процессов в заданной системе регулирования ψ и степенью колебательности переходных процессов в заданной системе регулирования m, можно определить значение заданной степени колебательности m системы по формуле:
 (1)
(1)
где ψ – степень затухания переходных процессов в заданной системе регулирования.
Передаточная функция объекта регулирования согласно исходных данных определяется по формуле:
 (2)
(2)
где Р – оператор Лапласа.
При n=2
выражение
 примет вид:
примет вид:
 (3)
(3)
По данным таблицы
1 определяем значения неизвестных
параметров: К=0,7 ,
 ,T1=70
, T2=35.
Тогда после подстановки значений выше
приведенных параметров получаем
окончательное выражение для передаточной
функции объекта регулирования:
,T1=70
, T2=35.
Тогда после подстановки значений выше
приведенных параметров получаем
окончательное выражение для передаточной
функции объекта регулирования:
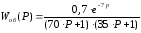 (4)
(4)
Определим расширенные
частотные характеристики объекта
регулирования. Расширенные частотные
характеристики какого-либо звена можно
получить подстановкой в передаточную
функцию этого звена W(P)
оператора
 или
или ,
в выражениях для оператора Лапласа ω –
частота, с-1.
В первом случае расчётные формулы
метода обеспечивают получение границы
заданной степени колебательности
системы m,
а во втором - получение границы заданной
степени устойчивости системы
,
в выражениях для оператора Лапласа ω –
частота, с-1.
В первом случае расчётные формулы
метода обеспечивают получение границы
заданной степени колебательности
системы m,
а во втором - получение границы заданной
степени устойчивости системы
 в пространстве параметров настройки
регулятора.
в пространстве параметров настройки
регулятора.
Заменим в формуле
(4) оператор
 ,
в результате получаем выражение для
РАФЧХ объекта регулирования:
,
в результате получаем выражение для
РАФЧХ объекта регулирования:
 (5)
(5)
Используя
математический пакет MathCad,
предварительно задав начальное значение
частоты
 =0
с-1
и шаг по частоте
=0
с-1
и шаг по частоте
 с-1,
рассчитываем расширенные частотные
характеристики объекта при изменении
частоты до ω=0,055
с-1.
с-1,
рассчитываем расширенные частотные
характеристики объекта при изменении
частоты до ω=0,055
с-1.
Расширенная вещественная частотная характеристика (РВЧХ):
Reоб(m,ω)=Re(Wоб(m,iω)) (6)
Расширенная мнимая частотная характеристика (РМЧХ):
Imоб(m,ω)=Im(Wоб(m,iω)) (7)
Расширенная амплитудно-частотная характеристика (РАЧХ)
 (8)
(8)
Расширенная фазо-частотная характеристика (РФЧХ):
 (9)
(9)
Результаты расчётов сведём в таблицу 2, приведенную ниже.
Таблица 2 – Расширенные частотные характеристики объекта регулирования
|
частота ω, с-1 |
Reоб(m,ω) |
Imоб(m,ω) |
Аоб(m,ω) |
φоб(m,ω), рад |
|
0 |
0,7 |
0 |
0,7 |
0,000 |
|
0,001 |
0,711 |
-0,081 |
0,715 |
-0,114 |
|
0,002 |
0,708 |
-0,165 |
0,727 |
-0,233 |
|
0,003 |
0,69 |
-0,248 |
0,733 |
-0,359 |
|
0,004 |
0,658 |
-0,327 |
0,735 |
-0,497 |
|
0,005 |
0,613 |
-0,399 |
0,732 |
-0,651 |
|
0,006 |
0,557 |
-0,462 |
0,724 |
-0,829 |
|
0,007 |
0,493 |
-0,513 |
0,712 |
-1,041 |
|
0,008 |
0,425 |
-0,552 |
0,696 |
-1,299 |
|
0,009 |
0,354 |
-0,578 |
0,677 |
-1,633 |
|
0,01 |
0,283 |
-0,592 |
0,656 |
-2,092 |
|
0,011 |
0,216 |
-0,596 |
0,634 |
-2,759 |
|
0,012 |
0,152 |
-0,59 |
0,61 |
-3,882 |
|
0,013 |
0,094 |
-0,578 |
0,585 |
-6,149 |
|
0,014 |
0,041 |
-0,559 |
0,56 |
-13,634 |
|
0,015 |
-5,06E-03 |
-0,536 |
0,536 |
105,887 |
|
0,016 |
-0,045 |
-0,509 |
0,511 |
11,311 |
|
0,017 |
-0,08 |
-0,481 |
0,488 |
6,013 |
|
0,018 |
-0,109 |
-0,452 |
0,465 |
4,147 |
|
0,019 |
-0,134 |
-0,422 |
0,443 |
3,149 |
|
0,02 |
-0,154 |
-0,392 |
0,421 |
2,545 |
|
0,021 |
-0,17 |
-0,364 |
0,401 |
2,141 |
|
0,022 |
-0,182 |
-0,336 |
0,382 |
1,846 |
|
0,023 |
-0,192 |
-0,309 |
0,364 |
1,609 |
|
0,024 |
-0,199 |
-0,284 |
0,346 |
1,427 |
|
0,025 |
-0,203 |
-0,26 |
0,33 |
1,281 |
|
0,026 |
-0,206 |
-0,237 |
0,314 |
1,150 |
|
0,027 |
-0,207 |
-0,216 |
0,299 |
1,043 |
|
0,028 |
-0,207 |
-0,197 |
0,286 |
0,952 |
|
0,029 |
-0,206 |
-0,179 |
0,272 |
0,869 |
|
0,03 |
-0,204 |
-0,162 |
0,26 |
0,794 |
|
0,031 |
-0,201 |
-0,146 |
0,248 |
0,726 |
|
0,032 |
-0,197 |
-0,132 |
0,237 |
0,670 |
|
0,033 |
-0,193 |
-0,119 |
0,227 |
0,617 |
|
0,034 |
-0,189 |
-0,107 |
0,217 |
0,566 |
|
0,035 |
-0,185 |
-0,095 |
0,208 |
0,514 |
|
0,036 |
-0,18 |
-0,085 |
0,199 |
0,472 |
|
0,037 |
-0,175 |
-0,076 |
0,191 |
0,434 |
|
0,038 |
-0,17 |
-0,067 |
0,183 |
0,394 |
|
0,039 |
-0,165 |
-0,059 |
0,176 |
0,358 |
|
0,04 |
-0,161 |
-0,052 |
0,169 |
0,323 |
|
0,041 |
-0,156 |
-0,045 |
0,162 |
0,288 |
|
0,042 |
-0,151 |
-0,039 |
0,156 |
0,258 |
|
0,043 |
-0,146 |
-0,034 |
0,15 |
0,233 |
|
0,044 |
-0,142 |
-0,029 |
0,144 |
0,204 |
|
0,045 |
-0,137 |
-0,024 |
0,139 |
0,175 |
|
0,046 |
-0,133 |
-0,02 |
0,134 |
0,150 |
|
0,047 |
-0,128 |
-0,016 |
0,129 |
0,125 |
|
0,048 |
-0,124 |
-0,012 |
0,125 |
0,097 |
|
0,049 |
-0,12 |
-9,00E-03 |
0,12 |
0,075 |
|
0,05 |
-0,116 |
-6,01E-03 |
0,116 |
0,052 |
|
0,051 |
-0,112 |
-3,27E-03 |
0,112 |
0,029 |
|
0,052 |
-0,109 |
-7,63E-04 |
0,109 |
0,007 |
|
0,053 |
-0,105 |
1,53E-03 |
0,105 |
-0,015 |
|
0,054 |
-0,102 |
3,62E-03 |
0,102 |
-0,035 |
|
0,055 |
-0,098 |
5,53E-03 |
0,098 |
-0,056 |
Расчётные формулы корневого метода для ПИ-регулятора имеют следующий вид:
 (10)
(10)
 (11)
(11)
В вышеприведенных
формулах (10) и (11)
 – коэффициент передачи ПИ-регулятора,
– коэффициент передачи ПИ-регулятора, – постоянная
интегрирования ПИ-регулятора.
– постоянная
интегрирования ПИ-регулятора.
Зададим диапазон
изменения частоты
 с-1
с шагом
с-1
с шагом
 c-1,
определим настройки регулятора
c-1,
определим настройки регулятора
 иКр
в заданном
диапазоне частот. Результаты расчётов
сведём в таблицу 3.
иКр
в заданном
диапазоне частот. Результаты расчётов
сведём в таблицу 3.
Таблица 3 –Результаты расчёта настройки ПИ- регулятора в заданном диапазоне частот
|
частота ω, с-1 |
Кр/Ти |
Кр |
частота ω, с-1 |
Кр/Ти |
Кр |
|
0 |
0 |
-1.429 |
0,028 |
0.071 |
3.072 |
|
0,001 |
1.657e-4 |
-1.354 |
0,029 |
0.073 |
3.304 |
|
0,002 |
6.539e-4 |
-1.272 |
0,03 |
0.075 |
3.539 |
|
0,003 |
1.451e-3 |
-1.182 |
0,031 |
0.077 |
3.778 |
|
0,004 |
2.543e-3 |
-1.085 |
0,032 |
0.079 |
4.019 |
|
0,005 |
3.914e-3 |
-0.98 |
0,033 |
0.08 |
4.264 |
|
0,006 |
5.55e-3 |
-0.869 |
0,034 |
0.081 |
4.511 |
|
0,007 |
7.435e-3 |
-0.75 |
0,035 |
0.081 |
4.76 |
|
0,008 |
9.551e-3 |
-0.625 |
0,036 |
0.081 |
5.012 |
|
0,009 |
0.012 |
-0.493 |
0,037 |
0.081 |
5.266 |
|
0,01 |
0.014 |
-0.354 |
0,038 |
0.08 |
5.522 |
|
0,011 |
0.017 |
-0.209 |
0,039 |
0.079 |
5.779 |
|
0,012 |
0.02 |
-0.058 |
0,04 |
0.077 |
6.039 |
|
0,013 |
0.023 |
0.099 |
0,041 |
0.074 |
6.3 |
|
0,014 |
0.026 |
0.262 |
0,042 |
0.071 |
6.562 |
|
0,015 |
0.029 |
0.43 |
0,043 |
0.068 |
6.825 |
|
0,016 |
0.033 |
0.604 |
0,044 |
0.063 |
7.089 |
|
0,017 |
0.036 |
0.784 |
0,045 |
0.059 |
7.354 |
|
0,018 |
0.039 |
0.969 |
0,046 |
0.053 |
7.62 |
|
0,019 |
0.043 |
1.159 |
0,047 |
0.047 |
7.886 |
|
0,02 |
0.046 |
1.354 |
0,048 |
0.04 |
8.153 |
|
0,021 |
0.05 |
1.554 |
0,049 |
0.032 |
8.42 |
|
0,022 |
0.053 |
1.758 |
0,05 |
0.023 |
8.686 |
|
0,023 |
0.056 |
1.967 |
0,051 |
0.014 |
8.953 |
|
0,024 |
0.06 |
2.18 |
0,052 |
3.526e-3 |
9.219 |
|
0,025 |
0.063 |
2.397 |
0,053 |
-7.687e-3 |
9.484 |
|
0,026 |
0.066 |
2.618 |
0,054 |
-0.02 |
9.749 |
|
0,027 |
0.068 |
2.843 |
0,055 |
-0.033 |
10.013 |
По данным таблицы
3 построим график зависимости
 ,
т.е. укажем границу заданного запаса
устойчивости системы регулирования на
рисунке 3.
,
т.е. укажем границу заданного запаса
устойчивости системы регулирования на
рисунке 3.

Рисунок 3 – Область параметров настройки ПИ-регулятора
Полученная кривая
является линией заданной степени
затухания Ψ=Ψзад=0,75
процесса регулирования, что соответствует
степени колебательности m=0.221.
Таким образом, все значения
 иKp,
лежащие на этой кривой, обеспечивают
определенную степень затухания (в данном
случае Ψ=Ψзад=0,75).
Значения
иKp,
лежащие на этой кривой, обеспечивают
определенную степень затухания (в данном
случае Ψ=Ψзад=0,75).
Значения
 иKp,
лежащие внутри области, ограниченной
данной кривой и осями координат, обеспечат
процесс регулирования со степенью
затухания больше заданного (Ψ1>Ψзад),
а лежащие вне этой области – со степенью
затухания меньше заданной (Ψ1<Ψзад).
иKp,
лежащие внутри области, ограниченной
данной кривой и осями координат, обеспечат
процесс регулирования со степенью
затухания больше заданного (Ψ1>Ψзад),
а лежащие вне этой области – со степенью
затухания меньше заданной (Ψ1<Ψзад).