

1.3. Системы преобразования сигналов [1,9,14,18]
Сигналы, в любой форме материального представления, содержат определенную полезную информацию. Если при преобразованиях сигналов происходит нарушение заключенной в них информации (частичная утрата, количественное изменение содержания и т.п.), то такие изменения называются искажениямисигнала. Если полезная информация остается постоянной, то такие изменения называютсяпреобразованиямисигнала.
Любые изменения сигналов сопровождаются изменением их спектра, и по характеру этого изменения разделяются на два вида: линейные и нелинейные. К нелинейнымотносят изменения, при которых в составе спектра сигналов появляются новые гармонические составляющие. Прилинейныхизменениях сигналов изменяются амплитуды и/или начальные фазы гармонических составляющих спектра. И линейные, и нелинейные изменения сигналов могут происходить как с сохранением полезной информации, так и с ее искажением. Это зависит не только от характера изменения спектра сигналов, но и от спектрального состава самой полезной информации.
Общее понятие систем. Преобразование и обработка сигналов осуществляется в системах. Понятия сигнала и системы неразрывны, так как любой сигнал существует в пределах какой-либо системы. Система обработки сигналов может быть реализована как в материальной форме (специальное устройство, измерительный прибор, совокупность физических объектов с определенной структурой взаимодействия и т.п.), так и программно на ЭВМ или любом другом специализированном вычислительном устройстве. Форма реализации системы существенного значения не имеет, и определяет только ее возможности при анализе и обработке сигналов.
Рис. 1.3.1. Графическое представление
системы.
![]()
Формализованная система представляет собой системный оператор(алгоритм) преобразования входного сигнала s(t) –воздействия иливозбуждения, в сигнал на выходе системы y(t) –откликиливыходную реакциюсистемы. Символическое обозначение операции преобразования (трансформации сигнала):y(t) =T[s(t)].
Системный оператор T- это набор правил преобразования (transformation) сигнала s(t) в сигнал y(t). Так, например, в самом простейшем случае таким правилом может быть таблица перекодировки входных сигналов в выходные. Для общеизвестных операций преобразования сигналов применяются двухсимвольные индексы операторов трансформации, где вторым символом обозначается конкретный вид операции (например, TF- преобразование Фурье).
Входной сигнал системы может представлять собой m- мерный вектор, а выходной сигналn- мерный вектор, при этом система будет иметьmвходов иnвыходов. Пример такой системы в геофизике: трехканальный гамма-спектрометр, на три входа решающего блока которого поступают потоки сигналов от калиевого, радиевого и ториевого каналов амплитудного анализатора спектрометра, а на три выхода решающего блока подаются результаты количественной интерпретации входной информации - сигналы количественных содержаний калия, урана и тория, при этом системный оператор реализует алгоритм решения системы трех линейных уравнений с тремя неизвестными.
Для детерминированных входных сигналов соотношение между выходными и входными сигналами всегда однозначно задается системным оператором. В случае реализации на входе системы случайного входного процесса аналогично существует однозначное соответствие процессов на выходе и входе системы, однако при этом одновременно происходит изменение статистических характеристик сигнала (математического ожидания, дисперсии, корреляционной функции и пр.), которое также определяется системным оператором.
Для полного определения системы необходимо задание характера, типа и области допустимых величин входных и выходных сигналов. Как правило, системы выполняются на сигналы одного типа по входу/выходу, и подразделяются на системы непрерывного времени (аналоговые или дискретные сигналы на входе и выходе) и цифровые системы. Совокупность системного оператора Т и областей входных/выходных сигналов образует математическую модель системы.
Линейные и нелинейные системы составляют два основных класса систем обработки сигналов. Термин линейности (linear) означает, что система преобразования сигналов должна иметь произвольную, но в обязательном порядке линейную связь между входным сигналом (возбуждением) и выходным сигналом (откликом) с определенным изменением спектрального состава входного сигнала (усиление или подавление определенных частотных составляющих сигнала). В нелинейных (nonlinear) системах связь между входным и выходным сигналом определяется произвольным нелинейным законом с дополнением частотного состава входного сигнала частотными составляющими, отсутствующими во входном сигнале.
Математически связь между аналоговыми сигналами входа s(t) и выходаy(t) в линейной системе обычно задается линейным дифференциальным уравнением
![]() am
am![]() =
=![]() bn
bn![]() .
(1.3.1)
.
(1.3.1)
где amиbn– параметрические коэффициенты системы. Максимальный порядок производной входного сигнала в уравнении (1.3.1) не превышает порядка производной выходного сигнала, т.е.m≤n. Значениеmназываетсяпорядкомсистемы. При нормировке уравнения к ао= 1 получаем неоднородное линейное дифференциальное уравнение для произвольного входного сигналаs(t), решение которого дает выходной сигналy(t)
y(t) =![]() bn
bn![]() –
–![]() am
am![]() .
(1.3.1')
.
(1.3.1')
Аналогичная связь выхода с входом в дискретной (цифровой) системе описывается разностными уравнениями
![]() am
y((k-m)t)
=
am
y((k-m)t)
=![]() bn
s((k-n)t).
(1.3.2)
bn
s((k-n)t).
(1.3.2)
y(kt)
=![]() bns((k-n)t)
–
bns((k-n)t)
–![]() amy((k-m)t).
(1.3.2')
amy((k-m)t).
(1.3.2')
Уравнение (1.3.2') можно рассматривать как алгоритм последовательного вычисления значений y(kt),k= 0,1,2, …, по значениям входного сигнала s(kt) при известных значениях коэффициентов am, bnи задании определенных начальных условий s(-kt), y(-kt).
Стационарные и нестационарные системы. Система считается стационарной и имеетпостоянные параметры, если ее свойства (математический алгоритм оператора преобразования) в пределах заданной точности не зависят от входного и выходного сигналов и не изменяются ни во времени, ни от каких-либо других внешних факторов. Математически это означает задание системы уравнениями типа (1.3.1-2) с постоянными значениями коэффициентов amи bn. В противном случае система является нестационарной и называетсяпараметрическойили системой с переменными параметрами. Среди последних большое значение имеют так называемые адаптивные системы обработки данных. В этих системах производится, например, оценивание определенных параметров входных и выходных сигналов, по результатам сравнения которых осуществляется подстройка параметров преобразования (переходной характеристики системы) таким образом, чтобы обеспечить оптимальные по производительности условия обработки сигналов или минимизировать погрешность обработки.
Основные системные операции.К базовым линейным операциям, из которых могут быть сформированы любые линейные операторы преобразования, относятся операции скалярного умножения, сдвига и сложения сигналов:
y(t) = c s(t), y(t) = s(t-t), y(t) = a(t)+b(t).
Отметим, что строго корректно операции сложения и умножения являются линейными только для аналоговых и дискретных сигналов. В случае цифровых сигналов они линейны относительно самих цифровых сигналов, но если последние - результат операции АЦП, то сложение и умножение не может считаться линейным абсолютно точно по отношению к исходным сигналам.
Для нелинейных систем выделим важный тип безинерционных операций нелинейной трансформации сигнала, результаты которой зависят только от его входных значений. К ним относятся, например, операции квадратирования и логарифмирования сигнала:
y(t) = [s(t)]2,y(t) =log[s(t)].
Линейные системы. Система считается линейной, если ее реакция на входные сигналы аддитивна (выполняется принцип суперпозиции сигналов) и однородна (выполняется принцип пропорционального подобия).
Принцип аддитивности требует, чтобы реакция системы на сумму входных сигналов была равна сумме реакций на каждый сигнал в отдельности. Так, для двух сигналов должно иметь место:
T[a(t)+b(t)] =T[a(t)]+T[b(t)].
Принцип однородности или пропорционального подобия требует сохранения однозначности масштаба преобразования при любой амплитуде входного сигнала:
T[c s(t)] = c T[s(t)].
Другими словами, отклик линейной системы на взвешенную сумму входных сигналов должен быть равен взвешенной сумме откликов на отдельные входные сигналы независимо от их количества и для любых весовых коэффициентов, в том числе комплексных.
Примеры.
1. Система y(t) = a2t.
y(t1) = a2t1, y(t2) = a2t2, y(ct) = a2ct.
y(t1+t2) = a2(t1+t2) = a2t1+a2t2 = y(t1)+y(t2). Система аддитивна.
cy(t) = ca2t = a2ct = y(сt). Система однородна. Следовательно, система линейна.
2. Система y(t) = a·t2.
y(t1)= at12, y(t2)= at22, y(ct)= a(ct)2= ac2t2.
y(t1+t2)= a(t1+t2)2 y(t1)+y(t2)= at12+at22. Система не аддитивна.
с y(t) = с at2 y(сt) = ac2t2. Система неоднородна. Следовательно, система нелинейна.
При программной реализации линейных систем на ЭВМ особых затруднений с обеспечением линейности в разумных пределах значений входных и выходных сигналов, как правило, не возникает. При физической (аппаратной) реализации систем обработки данных диапазон входных и/или выходных сигналов, в котором обеспечивается линейность преобразования сигналов, всегда ограничен и должен быть специально оговорен в технической документации или методической инструкции.
Инвариантность систем к сдвигу.Система называется инвариантной к сдвигу, если сдвиг входного сигнала по аргументам (времени, координатам пространства и т.п.) вызывает соответствующий сдвиг выходного сигнала:
y(x,t) = T[s(x,t)], T[s(x-x,t-t)] = y(x-x,t-t).
Инвариантность системы к сдвигу является одним из подтверждений постоянства ее параметров.
Линейные системы, инвариантные к сдвигу.Линейность и инвариантность к сдвигу являются независимыми свойствами систем и не определяют друг друга. Так, например, операция квадратирования сигнала инвариантна к сдвигу, но нелинейна.
В теории анализа и обработки данных основное место занимают системы, линейные и инвариантные к сдвигу (ЛИС - системы). Они обладают достаточно широкими практическими возможностями при относительной простоте математического аппарата. В дальнейшем, если это специально не оговаривается, будем иметь в виду именно такие системы.
Преимущество, которое отдается ЛИС - системам в методах обработки информации, базируется на возможности разложения входного сигнала любой, сколь угодно сложной формы, на составляющие простейших форм, отклик системы на которые известен и хорошо изучен, с последующим вычислением выходного сигнала в виде суммы откликов на все составляющие входного сигнала. В качестве простейших форм разложения сигналов используются, как правило, единичные импульсы и гармонические составляющие. Разложение по единичным импульсам применяется при динамическом представлении сигнала в зависимости от реальных физических аргументов (времени, координат и пр.) и использует операцию свертки. Разложение на гармонические составляющие использует спектральное (частотное) представление сигнала и преобразование Фурье.
Рис. 1.3.2 Соединения систем.
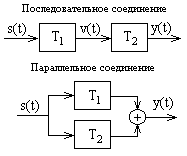
y(t) =T2[T1[s(t)]] =T1[T2[s(t)]].
При параллельном соединении входной сигнал поступает одновременно на входы всех составляющих систем, а выходные сигналы систем суммируются:
y(t) = T1[s(t)] + T2[s(t)] + ... + TN[s(t)].
Образуемые в результате соединений системы в целом также являются ЛИС - системами, если линейны и инвариантны к сдвигу системы, в них входящие.
Обобщенная схема системыцифровой обработки сигналов на рис. 1.3.3 приведена в качестве примера.
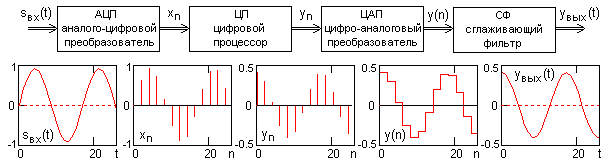
Рис. 1.3.3. Структурная схема системы дифференцирования сигналов.