

5.3.5 Расчет и анализ частотных характеристик аср
Этот заключительный этап исследований выполняется с помощью программы «Расчет частотных характеристик системы».
1. Вызовите клавишей F3 программу «Расчет частотных характеристик».
2. Введите в компьютер данные о выбранном законе регулирования и настройках регулятора, указанные при выполнении п. 7 подраздела 5.3.2.
3. Скопируйте результаты вычислений, выведенные на экран в виде таблицы.
4. По результатам расчета постройте графики АФЧХ объекта, регулятора и условно разомкнутой АСР.
5. С использованием годографа W(jω)АСР определите запасы устойчивости системы по модулю и по фазе.
6 Содержание отчета о работе
Отчет о работе должен содержать исходные данные выполненного варианта, результаты определения динамических параметров объекта регулирования, модель объекта регулирования в виде его передаточной функции и амплитудно-фазовой частотной характеристики, описание и результаты выбора автоматического регулятора и расчет параметров его настройки, таблицы и графики, полученные в результате исследования работы АСР с помощью пакета прикладных программ, выводы о соответствии полученных показателей качества регулирования заданным в исходных данных значениям.
Список использованных источников
1. Теория автоматического управления: Учеб. для вузов / В.Н.Брюханов, М.Г.Косов, С.П.Протопопов и др.; Под ред. Ю.М.Соломенцева. – 3-е изд., стер. - М.: Высш. шк., 2001 - 268с.: ил.
2. Информационные технологии систем управления технологическими процессами: Учеб. для вузов / М.М.Благовещенская, Л.А.Злобин. - М.: Высш. шк., 2005 - 768с.: ил.
3. Автоматическое управление в химической промышленности: Учебник для вузов. Под ред. Е.Г. Дудникова. - М.; Химия, 1987. 368 с.
4. Голант А.И., Альперович Л.С., Васин В.М. Системы цифрового управления в химической промышленности. - М.; Химия, 1985. 256 с.
5. Суханов Е.Л., Матюхин В.И. Расчет и проектирование систем автоматического регулирования: Методическое пособие по выполнению курсового проекта по дисциплинам цикла «Автоматика». Екатеринбург: Издательство УГТУ, 2001.
Приложение
Таблица – Варианты заданий для расчета АСР
|
№ варианта |
№ кривой разгона |
№ шкалы времени |
Возмущающее воздействие, x, % |
Максимальное возмущающее воздействие, xmax, % |
Показатели качества регулирования | |||
|
Тип переходного процесса |
y1() |
yст |
р | |||||
|
1 |
1 |
1 |
5 |
10 |
апериодический |
26 |
8 |
360 |
|
2 |
2 |
1 |
5 |
12 |
= 20% |
28 |
6 |
430 |
|
3 |
3 |
1 |
5 |
15 |
min∆y2dτ |
34 |
4 |
700 |
|
4 |
4 |
1 |
5 |
10 |
= 20% |
22 |
10 |
400 |
|
5 |
5 |
1 |
5 |
12 |
апериодический |
27 |
10 |
620 |
|
6 |
1 |
2 |
4 |
15 |
апериодический |
52 |
10 |
350 |
|
7 |
2 |
2 |
4 |
10 |
min∆y2dτ |
32 |
7 |
690 |
|
8 |
3 |
2 |
4 |
12 |
min∆y2dτ |
38 |
5 |
940 |
|
9 |
4 |
2 |
4 |
15 |
= 20% |
42 |
8 |
480 |
|
10 |
5 |
2 |
4 |
10 |
апериодический |
30 |
6 |
500 |
|
11 |
1 |
3 |
6 |
12 |
= 20% |
30 |
8 |
600 |
|
12 |
2 |
3 |
6 |
15 |
min∆y2dτ |
32 |
5 |
800 |
|
13 |
3 |
3 |
6 |
18 |
= 20% |
33 |
5 |
950 |
|
14 |
4 |
3 |
6 |
12 |
min∆y2dτ |
26 |
4 |
850 |
|
15 |
5 |
3 |
6 |
15 |
апериодический |
30 |
6 |
680 |
|
16 |
1 |
4 |
7 |
18 |
апериодический |
39 |
8 |
520 |
|
17 |
2 |
4 |
7 |
12 |
min∆y2dτ |
26 |
5 |
1000 |
|
18 |
3 |
4 |
7 |
15 |
= 20% |
28 |
4 |
1050 |
|
19 |
4 |
4 |
7 |
18 |
min∆y2dτ |
33 |
4 |
950 |
|
20 |
5 |
4 |
7 |
12 |
апериодический |
25 |
5 |
800 |
|
21 |
1 |
5 |
8 |
15 |
= 20% |
25 |
8 |
740 |
|
22 |
2 |
5 |
8 |
18 |
min∆y2dτ |
26 |
6 |
1200 |
|
23 |
3 |
5 |
8 |
20 |
апериодический |
35 |
6 |
900 |
|
24 |
4 |
5 |
8 |
15 |
min∆y2dτ |
27 |
7 |
1000 |
|
25 |
5 |
5 |
8 |
18 |
= 20% |
28 |
8 |
1000 |
|
|
|
|
|
|
|
|
|
|
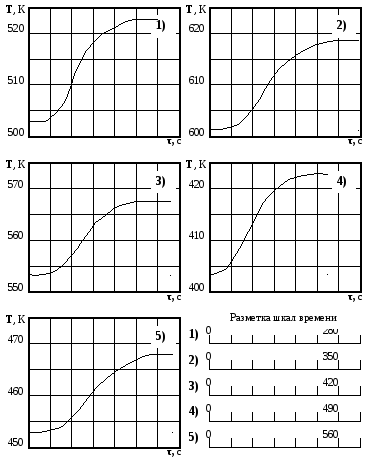
Рисунок – Кривые разгона объектов регулирования