

Kon_lec_BM_ster
.pdfКОНСПЕКТ ЛЕКЦІЙ «БУДІВЕЛЬНА МЕХАНІКА МАШИН»
Вступ
Курс «Будівельна механіка машин» відноситься до професійнооріентованих дисциплін і є продовженням та поглибленням базового курсу «Опір матеріалів».Характерною ознакою курсу є використання гіпотез при побудові розрахункових моделей тонкостінного стрижня , пластинки та оболонки. Бакалаври, спеціалісти та магістри після вивчення курсу «Будівельна механіка машин» набувають знання методів аналізу напружено-деформованого стану ферм, рам методом переміщень та скінчених елементів, замкнутих кругових кілець, прямокутних пластин, оболонок.
Крім розрахунків НДС елементів машин студенти методи визначення критичних сил при їх стисканні. В першій частині курсу вивчаються методи розрахунків на міцність і жорсткість стрижневих систем, кругових кілець і тонкостінних стрижнів при обмеженому крученні. В другій частині розглядаються методи розрахунків на міцність і жорсткість пластин і оболонок.
В третій частині наведені розрахунки на стійкість при стисканні ,стрижнів, рам, кругових кілець, пластин та оболонок.
ЧастинаI. «СТРИЖНЕВІ СИСТЕМИ»
ТЕМА 1. ФЕРМИ
Стрижневу геометрично незмінну систему з шарнірними з`єднаннями в вузлах називають фермою. Якщо зовнішні зосереджені сили прикладати тільки в вузлах то кожен стрижень даної системи буде рівномірно розтягуватись або стискатись. При жорсткому з`єднанні стержнів в вузлах і при довільному навантаженні стрижневі системи називають рамами. В рамах стрижні крім розтягування (стискання) ще і згинаються. В комбінованих стрижневих системах окремі стрижні навантажуються в вузлах як елементи ферми, а інші як елементи рами. Окрему розрахункову систему складають тонкостінні стрижні,
товщина яких значно менша ніж довжина чи ширина. В таких стрижнях при згині та крученні неможливо використати гіпотезу плоских перерізів.
§1 Структурний аналіз плоских ферм.
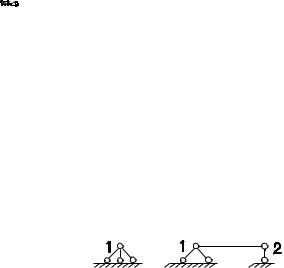
Точки, де шарнірно з׳єднуються всі стрижні , будемо називати вузлами.
Рис.1а Рис.1б Вузлами являються точки 1,2,3 ( див. Рис1а, Рис1.б, Рис.1с, Рис.1д). Точка А
(див.Рис1.б) не буде вузлом ,бо стрижні 1А-А3 зв’язані між собою жорстко. Точка 1 (див. Рис.1с) на площині по відношенню до системи координат має дві степені
Рис.1с Рис.1д вільності. Якщо точку 1 з`єднати з опорою стрижнем ,то степінь вільності
зменшиться на 1.Нехай на площині розміщено В вузлів, які єднанні між собою та опорою С стрижнями. Степінь вільності ферми n по відношенні до опори, зв’язаної с системою координат, знаходимо із формули
n=2B-C (1.1)
Якщо n=0 то ферма статично визначена, при п≥1 ферма перетворюється в механізм, а при п≤(-1) маємо статично невизначувану систему. Для незакріплених ферм визначають степінь мінливості w
w=2В-С-3 (1.2)
Наприклад: ферми (Рис.1 а), (рис.1 д) статично визначувана ( w=0,n=0 ); ферма (Рис.1.с) раз статично невизначувана (n=-1); комбінована система (Рис.1б) статично визначувана (w=0).
Незмінну частини ферми можна розглядати як тверде тіло на площині, яке будемо називати диском. Наприклад, ферму ( Рис.1а) можна розглядати як

диск. Диском можна вважати трикутну ферму 1-2-3 (Рис.1а) або довільний стержень.
Диск I (Рис.2а )по відношенню до диска II має три степені вільності. В одне ціле їх можна єднати стержнем А-В і шарніром 1-2,що лишає можливості двох зміщень.
Степінь мінливості стержневої системи можна знайти по формулі w=3Д-2Ш-С-З (1.3)
Д- число дисків, Ш- число простих шарнірів, С-число стержнів, які з’єднують між собою диски. Якщо в точці 1 з’єднати К-дисків одним шарніром, то клькість простих шарнірів можна визначити із формули
Ш=(К-1)
Для закріплених до опори ферм визначають степінь вільності n=3Д-2Ш-С (1.4)
Ферму (Рис.1а) можна розглядати як один диск, тому w=0 (Ш=0,С=0).Можна кожен стержень цієї ферми розглядати як диск тоді із формули (1.3) знаходимо w=0. (Д=5, Ш=6 ,С=0)
Крім визначення степені вільності чи мінливості необхідно з׳ясувати правила утворення даної стержневої системи.
Перший спосіб утворення геометрично незмінної ферми –це додавання нового вузла Е (Рис.1а) до диска (1-2-3).Якщо стержні (1-Е) і (2-Е) лежать на одній прямій ,то така ферма раптово мінлива. Внутрішні сили в стержнях такої ферми нескінченно великі або невизначені ( можуть приймати довільні значення).
Рис. 2а Рис. 2в

По другому способу два диски I і II (Рис.2в) з׳єднаються трьома стержнями, що не перетинаються в одній точці, або з׳єднаються (Рис.2а) шарніром (1-2) і стержнем А-В, який не перетинає вісь даного шарніра. Точка перетину двох стержнів (Рис.3в) утворює дійсний (1-3),або уявний шарнір (1-2),що лежить за дисками I і II.
Рис. 3.а Рис. 3.в Третім способом з’єднуються три диски (Рис.3а) трьома шарнірами, що не
лежать на одній прямій, або з’єднуються за допомогою шести стрижнів (Рис.3в) при умові, що дійсні (1-3) і уявні (1-2),(2-3) шарніри не лежать на одній прямій.
§2. Методи визначення зусиль в стержнях статично визначених ферм.
При визначенні зусиль в стержнях ферм використаємо спосіб перерізів, за допомогою яких вирізають вузли (Рис.4 ) перерізи (0-1),(3-б) або перерізи (1-1, 2-2,3-3,1-2,2-4,3-4).,що розділяють ферму на дві частини
Рис. 4 Спосіб вирізання вузлів доцільно використовувати для вузлів, де сходяться
два стрижні з невідомими зусиллями. Для ферми (Рис.4) такими є вузли С і Д. В вузлі С із умови рівноваги знаходимо
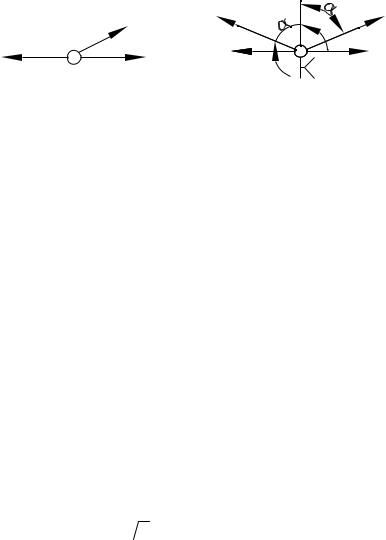
S3P 2P 0, S4P 0 ;
Аналогічно знаходяться зусилля в вузлі Д із умови рівноваги сил справа від розрізу (3-b).Як виняток спосіб вирізання вузлів використовується для вузлів (Рис.5а),де сходяться три стержні, із яких два лежать на одній прямій, для
S4 |
S1 S3 |
S1 |
S2 |
S3 |
S4 |
Рис.5а |
Рис.5в |
визначення зусилля тільки в стержні |
S1 .Якщо в вузлі відсутні зовнішні сили |
(Рис5 а) ,(Рис.5в) ,то зусилля в стержнях S1 , S2 дорівнюють нулю.
Вузол К (Рис.5в) лежить на осі симетрії ферми. В решті стержнів зусилля знаходимо, проводячи розрізи ферми на дві частини. Розріз повинен не перетинати більше ніж три стержні. Горизонтальні стержні ферми називають поясами. В вертикальних і похилих стержнях зусилля знаходимо із умови рівноваги сил зліва чи справа від заданого перерізу. Наприклад, S11 знаходимо із умови рівноваги сил зліва від перерізу (2-2)
S P11 P( 2 4) 0
 2
2
Зусилля S19 знаходимо із умови рівноваги сил справа від перерізу (2-4)
S19P P(2 1 2) 0
Спосіб моментних точок використовується для знаходження зусиль в горизонтальних стержнях (пояси ферми). Наприклад, зусилля в стержні S12 знаходимо із умови рівноваги моментів сил зліва від перерізу (2-2) відносно точки M 2 , яку називають моментною для стержня S12

S12Pa Pa(2 2 4) 0
Точка M 5 являється моментною для стержня S18 .Зрівноважуємо моменти сил, що діють на ферму справа від перерізу (4-4) відносно M 5 , і знаходимо
S18Pa Pa( 3 2 2 1) 0
Зусилля в стержнях Skp від навантаження Р приведені в таблиці 2
при к=2,3...19
Метод сумісних перерізів використовується тоді, коли неможливо провести переріз через три стрижні. Наприклад (Рис.6), через стрижень 2 проводимо переріз (I-I) і допоміжний переріз (II-II) ,для яких складаємо рівняння
S1p a Pa 0; S2p S1p 0
Рис.6 Метод заміни стрижня використовується для визначення зусиль в стрижнях
ферм, в яких не можна використати попередні методи.
Метод заміни стержня використовується для визначення зусиль в стержнях ферм, в яких не можна використати попередні методи. Такі ферми не мають трикутної решітки , яка утворюється при добавлянні нового вузла двома стержнями (Рис.1а).
Наприклад ,ферма (рис.7а) утворена по третьому способу. Диски (стержні) 1,4,5 з’єднані між собою стержнями 2,3,8,9,6,7 умовні шарніри яких не лежать на одній прямій оскільки ( ).Перетворюємо дану ферму в ферму з
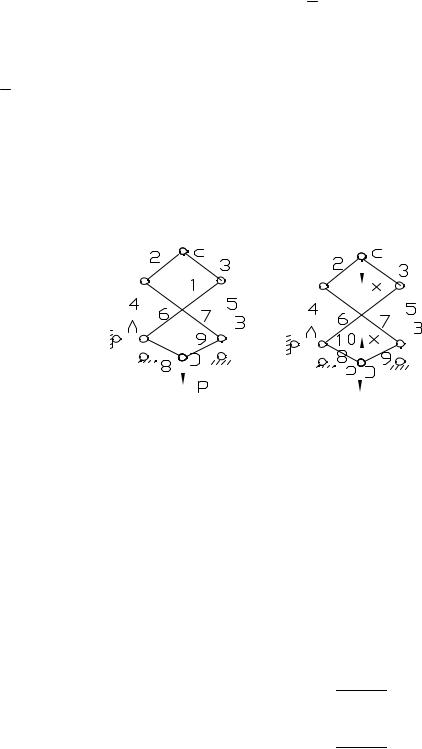
трикутною решіткою для чого стержень 1 відкидаємо і добавляємо новий стержень 10, який з’єднує точки А і В.Новоутворена ферма є фермою з трикутною решіткою. До вузлів С і Д прикладаємо сили Х (Рис.7в) в напрямку стержня 1. Зусилля в стержнях ферми (Рис.7в) знайдемо із формули при
(к=1,2…10)
Sk Skp S k X (1.5)
де Skp зусилля в кожному стержні ферми (Рис.7в) тільки від навантаження,
S k - зусилля в стержнях ферми (Рис.7в) від сил Х=1
.Для того щоб ферма (Рис.7в) не відрізнялась від ферми ( Рис.7 а) зусилля в
стержні 10 повинно дорівнювати нулю |
|
S |
S p |
|
|
|
X 0 |
|||||||||||||||||||||||||||||
S |
10 |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
10 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.7а Рис.7в Звідси визначаємо Х і із формули (1.5) випливає для стрижнів ферми ( Рис.7а)
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
S10P |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Sk |
Sk |
S k |
|
|
|
|
|
(1.6) |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S10 |
|
|
|
|
|||||
Значення зусиль |
S k Skp |
|
k |
при |
sinα =0,6 ; |
sin β =0,8 приведені в таблиці 1. |
||||||||||||||||||
S |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|||
к |
1 |
2 |
|
3 |
|
|
|
4 |
5 |
|
|
|
|
6 |
|
|
8 |
9 |
|
10 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||
p |
0 |
0 |
|
0 |
|
|
|
0 |
0 |
|
|
|
|
0 |
|
|
5 |
5 |
|
3 |
||||
Sk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
8 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
k |
|
1 |
5 |
5 |
|
-1 |
-1 |
|
5 |
|
5 |
|
5 |
|
5 |
|
7 |
|
|
|
S |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
6 |
|
6 |
8 |
8 |
24 |
|
||||||||
|
|
|
|
|
6 |
6 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S k |
|
9 |
15 |
15 |
|
9 |
|
9 |
|
15 |
|
15 |
|
10 |
|
10 |
0 |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
7 |
14 |
14 |
7 |
7 |
14 |
14 |
|
7 |
|
7 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
§3. Аналітичні ознаки раптової мінливості ферм
1. Спосіб нульового навантаження.
Якщо ферма статично визначена (n=0,w=0),то в відсутність навантаження зусилля в стрижнях ферми повинні дорівнюють нулю. Якщо у відсутність навантаження зусилля в стерижнях ферми не дорівнюють нулю, а невизначені, то ферма раптово мінлива. Наприклад ферма (Рис.8а) статично визначена п=2·6-12=0. Стрижні 5,6 нульові (Рис.5д).Зусилля в решті стрижнів можуть бути ненульовими. Наприклад, задамось довільним зусиллям в стрижні 2 і з умови рівноваги вузла С знаходимо зусилля в стрижнях 4 та 10.
2. Метод заміни стрижня.
Зусилля в стрижнях ферми по методу заміни стрижня визначаються по формулі (1.6). Якщо при заміні стрижня зусилля в допоміжному стрижні від сил Х=1 дорівнює нулю ,то ферма раптово мінлива.
Відкинемо опорний стржень (Рис. 8б) і добавимо допоміжний стрижень 9. Визначимо зусилля в цьому стрижні від сили Х=1,прикладеної в напрямку відкинутого опорного стрижня. Стрижні 5,6 нульові, тому стрижень 9 теж нульовий, тому ферма (рис.8а) раптово мінлива.
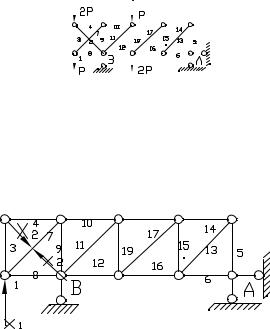
Рис.8а Рис.8в
§4 Статично невизначувані ферми
Ферма (рис.9) має два лишні стрижні (В=10,С=22, n=-2). Виберемо основну
статично визначувану систему (Рис.10), для |
|
чого розрізаємо |
внутрішній |
||||||||||||||||||||||||||
стрижень 2 |
і відкидаємо зайвий опорний стрижень 1.Основна система |
||||||||||||||||||||||||||||
навантажується силами Р і силами X1, X 2 (Рис.10).НевідоміX1, X 2 |
знаходимо із |
||||||||||||||||||||||||||||
умови, що переміщення по напрямку даних сил дорівнюють нулю. |
|
||||||||||||||||||||||||||||
|
|
|
ij X j ip |
0 |
(1.7) |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
де ij l2 |
S ik S kj lk |
; |
|
ip |
|
Pl2 |
|
ik |
Sk lk |
|
||||||||||||||||||
|
|
S |
|
||||||||||||||||||||||||||
|
|
|
19 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
|
|
|
|
|||
|
|
EF |
k 2 |
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
EF k 2 |
P l2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Позначимо
19 |
|
|
|
|
lk |
|
S ik S kj |
||||||
ij |
||||||
l2 |
||||||
k 2 |
|
|
|
|
||
Рис.9
Рис.10
19 |
|
i Skp lk |
|
|
|||
, ip |
S k |
P l2 |
|
k 2 |
|
|
|
Рівняння (1.7) запишемо в такій формі
ij X J ip P 0
1 |
|
1k |
ak |
|
|
|
1k |
|
k2 ak ; |
|
|
|
|
k2 |
|
k2 ak ; |
||||
де 11k |
|
k |
|
; 12k = |
|
|
|
22k |
= |
|
|
|||||||||
S |
S |
S |
S |
|
S |
S |
||||||||||||||
|
|
|
|
|
|
a |
|
|
|
|
|
a |
|
|
|
|
|
|
a |
|
|
|
|
|
|
1 Skp ak |
|
|
|
|
|
|
2 Skp ak |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
1Pk = S k |
P |
a |
; 2Pk = S k |
P |
a |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
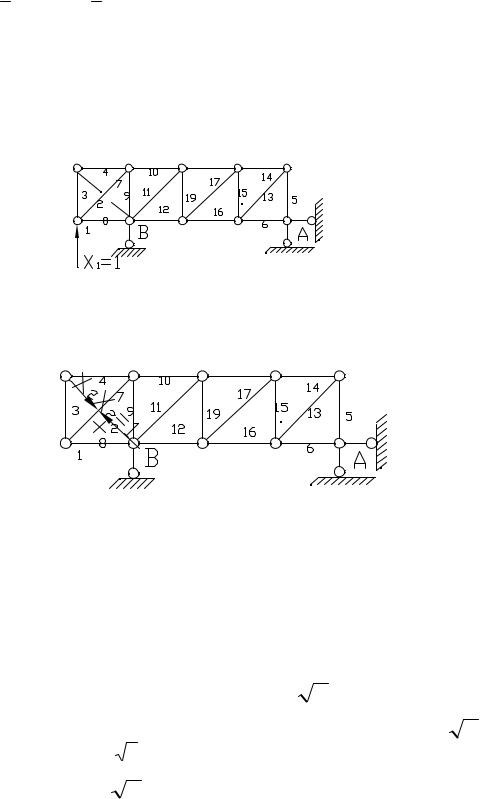
Зусилля S1k (Рис.11), S 2k (Рис.12) знаходяться в стрижнях ферм від сил
X i 1, (i 1,2)
Рис11
Рис. 12
Таблиця №2
к |
SkP |
|
|
1k |
|
|
k2 |
11k |
12k |
22k |
1Pk |
1Pk |
|
Sk |
||
S |
|
S |
||||||||||||||
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
0 |
|
0 |
|
1 |
|
0 |
0 |
2 |
0 |
0 |
0,87 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3 |
-2 |
|
0 |
- |
1 |
|
0 |
0 |
1 |
0 |
2 |
-2,61 |
||||
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4 |
0 |
|
0 |
- |
2 |
|
0 |
0 |
1 |
0 |
0 |
-0,61 |
||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|