

Kon_lec_BM_ster
.pdf
|
5 |
|
-2 |
|
1 |
|
0 |
|
|
1 |
0 |
|
|
|
|
0 |
|
|
|
2 |
|
|
|
0 |
-1,69 |
|||||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
-3 |
|
|
0 |
|
|
0 |
|
|
0 |
0 |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
0 |
-3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
7 |
2 |
2 |
|
|
2 |
|
|
1 |
|
2 |
2 |
-2 |
|
|
|
|
2 |
-4 |
|
2 |
|
|
0 |
5,02 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
-2 |
|
|
1 |
|
- |
1 |
|
|
1 |
- |
1 |
|
|
|
|
1 |
|
-2 |
|
|
|
|
0 |
-3,56 |
|||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
9 |
|
- |
|
|
1 |
|
- |
1 |
|
|
1 |
- |
1 |
|
|
|
|
1 |
|
-2 |
|
|
|
|
0 |
-3,56 |
|||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
10 |
|
2 |
-1 |
|
|
0 |
|
|
1 |
|
0 |
|
|
|
|
0 |
|
-2 |
|
|
|
0 |
2,94 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
-2 |
2 |
|
|
2 |
|
|
0 |
|
2 |
2 |
|
0 |
|
|
|
|
0 |
|
4 |
2 |
|
|
|
0 |
-3,26 |
|||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
0 |
|
|
2 |
|
|
0 |
|
|
4 |
|
0 |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
0 |
-0,63 |
||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
2 |
2 |
|
|
2 |
|
|
0 |
|
2 |
2 |
|
0 |
|
|
|
|
0 |
|
4 |
2 |
|
|
|
0 |
2,38 |
|||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
|
1 |
- |
1 |
|
|
0 |
|
|
1 |
|
0 |
|
|
|
|
0 |
|
- |
1 |
|
|
|
0 |
1,31 |
||||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
15 |
|
-1 |
- |
1 |
|
|
0 |
|
|
1 |
|
0 |
|
|
|
|
0 |
|
1 |
|
|
|
0 |
-0,69 |
|||||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
16 |
|
-1 |
1 |
|
|
0 |
|
|
1 |
|
0 |
|
|
|
|
0 |
|
- |
1 |
|
|
|
0 |
-1,32 |
|||||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
17 |
|
2 |
|
|
2 |
|
|
0 |
|
2 |
2 |
|
0 |
|
|
|
|
0 |
|
2 |
2 |
|
|
|
0 |
0,97 |
|||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
18 |
|
0 |
- |
2 |
|
|
0 |
|
|
4 |
|
0 |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
0 |
0,63 |
|||
|
|
|
|
|
|
3 |
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
19 |
1 |
|
|
1 |
|
|
0 |
|
1 |
|
0 |
|
|
|
|
|
0 |
|
1 |
|
|
|
|
0 |
0,31 |
||||
|
|
|
|
|
|
3 |
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
20 |
|
|
|
|
|
|
|
|
|
8,216 |
4,828 |
|
|
-3,41 |
-10,7 |
|
|
|
7,414 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Система (1.7) для ферми (Рис.9) має рішення |
|
X1 |
|
0,94; |
X 2 |
|
0,87 |
|
||||||||||||||||||||||
|
P |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|||
Зусилля в стрижнях статично невизначуваної ферми знайдемо із формули

Sk |
|
SkP |
|
|
1k |
X1 |
|
|
2k |
X 2 |
|
S |
S |
||||||||||
P |
P |
P |
|||||||||
|
P |
|
|
|
|
|
|
Результати розрахунків по визначенню зусиль в стрижнях статично невизначуваної ферми (Рис.9) приведені в таблиці №2.
§ 5 Комбіновані системи
Якщо окремі стрижні системи при навантаженні тільки розтягуються чи стискаються ,а інші працюють на згинання ,то таку стрижневу систему називають комбінованою.
Рис.13 Наприклад, в фермі (Рис.13) стрижень 2 тільки стискається як елемент
ферми, а стрижень 1 розтягується і згинається, тому дана стрижнева система являється комбінованою. В стрижневій системі (Рис.14а) стрижень А-B згинається, а
Рис.14а стрижні 1,2,3 являються елементами ферми. Дана система один раз статично
невизначувана (n=2·4-9). Виберемо основну систему: розріжемо стрижень 1 і прикладемо до розрізу розтягуючі сили X1 1 і знаходимо
S11 1; S12  2; S13 1
2; S13 1
Від сил X1 1 в стрижні А-В

Рис.14в
виникає згинальний момент M 1 (Рис.14в). Від сил Р епюра M P в основній системі показана на (Рис14с), а зусилля SkP 0 .Невідоме зусилля в стрижні 1 знаходимо із
Рис.14с
канонічного рівняння методу сил
|
|
|
|
11 X1 |
1P 0 |
|
|
|
|
|
|
|
|
||||||||||
|
5 |
|
1k |
|
1k l |
|
|
3a |
|
|
1 |
|
1dx |
|
|
8,82a |
|
5a3 |
|
||||
|
S |
S |
k |
|
M |
M |
|
|
|
|
|||||||||||||
де 11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||
Ek Fk |
|
|
|
EI |
|
EF |
3EI |
||||||||||||||||
|
1 |
|
|
0 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
3a |
|
1M Pdx |
|
|
5Pa3 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
M |
|
|
|
|
|||||||||||
|
|
|
1P |
|
|
|
EI |
|
3EI |
|
|
|
|||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|||||||
Зусилля в стрижнях ферми |
|
Sk і епюру моментів M знайдемо із формул |
|||||||||||||||||||||
|
|
Sk |
|
1k X1 ; |
|
M M P X1 |
|
1 |
|
|
|||||||||||||
|
|
S |
|
M |
|
|
|||||||||||||||||

ТЕМА2. РАМИ
§6. Метод переміщень.
Вданому методі за невідомі вибирають лінійні та кутові зміщення жорстких
Рис.15 вузлів. Кількість кутових невідомих дорівнює кількості жорстких вузлів.
Кількість лінійних невідомих дорівнює кількості в’язів, що закріплюють вузли від горизонтальних та вертикальних зміщень. Рама (Рис.15) має 4 жорстких вузлів і відповідно 4 кутових невідомих, а також два лінійні горизонтальні зміщення стержнів 1-0-2 та стержнів 3-5-4.
Рис.16
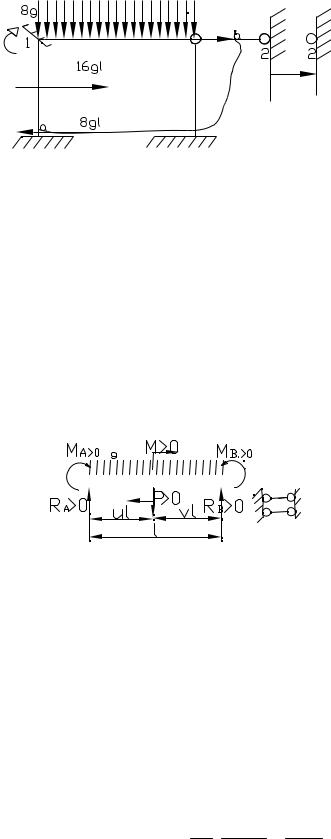
Рама (Рис.16) має дві невідомі: кут повороту вузла 1 ( Z1 ) і лінійне горизонтальне зміщення вузла 2 ( Z2 ).
Основна система для даної рами представлена на (Рис.17а).Жорсткий вузол 1 закріплений в’яззю від повороту і стрижнем 2 від лінійного зміщення. Z2 Вузол 1 повернемо по годинниковій стрілці на кутZ1 ,а стрижень 2 змістимо вправо на величинуZ2 .
Невідомі Z k знайдемо із умови ,що реакції в накладених в’язях дорівнюють нулю.
Z1 |
R2P |
|
Z2 |
Рис.17а
2 |
|
де rij реакція в i в’язі від зміщення |
|
|
|
. rij Z j RiP 0 |
(i 1,2) |
Z |
j |
1 , |
|
j 1 |
|
|
|
|
|
RiP - реакція i в’язі від навантаження Р. Визначимо опорні реакції стандартних елементів
На (Рис. 17в) приведено стандартний навантажений елемент. В точках А, Б
A









 B
B
Рис.17в Рис.17с стрижень може бути защемлений (З),шарнірно-закріплений ) (Ш) чи мати
защемлено-рухому(Рис.17с) опору, яку будемо позначати як (К). Реакції в опорах таких балок від навантаження і від зміщення та повороту вузлів можна знайти методом початкових параметрів чи методом сил. Нехай балка має защемлені опори(З-З) ,які зміщуються і повертаються.
Формула для визначення переміщень точок балки по методу початкових параметрів має вигляд y(x) y0 0 x E1I ( M12x2 R16x3 )

Таблиця 3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
. умови Гран З-З
З-З
З-З
З-З
З-З
З-Ш
З-Ш
З-Ш
З-Ш
З-Ш
З-К
З-К
З-К З-К
Наванта .. ження q
P
M
1 1
y2 1
q
P
M
1 1
y2 1
q
P
M
1 1
Опорні реакції
|
RA |
RB |
|||||
|
|
|
ql |
ql |
|||
|
|
|
2 |
2 |
|
||
Pv2 (1 2u) |
Pu2 (1 2v) |
||||||
|
Muv6 |
Muv6 |
|||||
|
|
|
l |
l |
|||
|
|
6i |
6i |
||||
|
|
|
l |
l |
|||
|
12i |
12i |
|||||
|
|
l2 |
|
l2 |
|||
|
5ql |
3ql |
|||||
|
|
|
8 |
|
8 |
|
|
Pv(3 v2 ) |
Pu2 (3 u) |
||||||
|
|
|
2 |
|
2 |
|
|
|
M(1 v2 )3 |
M(1 v2 )3 |
|||||
|
|
2l |
2l |
||||
|
|
|
|||||
|
|
3i |
3i |
||||
|
|
|
l |
l |
|||
|
|
3i |
3i |
||||
|
|
l 2 |
|
|
l2 |
|
|
|
|
ql |
0 |
|
|||
|
|
P |
0 |
|
|||
|
|
|
0 |
|
0 |
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
Опорні моменти
M A
ql2
12
Pv2ul
Mv(3u 1)
4i
l6i
ql2
8
Pvl(1 v2) 2
M(1 3v2 ) 2
3i
l3i
ql2
3
Pul(2 v2) 2
Mv i
M B
ql2
12
Pu2vl
Mu(3v 1)
2i
6i l
0
0
0
0
ql2
6
Pu2l
2
Mu i
Граничні умови : y(0) y1; dydx(0) 1; y(l) y2 ; dydx(l) 2

Із перших двох рівнянь випливає y0 y1; 0 |
1 |
|
|
Із останніх двох рівнянь знаходимо при i |
|
EI |
реакції в опорах і моменти . |
|
|
l |
|
Реакції в опорах і моменти балки (Рис.17в) знаходимо в таблиці 3.
Статичний спосіб визначення коефіцієнтів канонічних рівнянь методу переміщень.
Для рами (Рис. 16) основна система приведена на (Рис.17а).Проведемо розріз (1-1) і із умови рівноваги сил на горизонталь знайдемо
R2 p 8ql 0
|
|
|
|
|
|
|
Рис.18а |
|
Рис.18в |
||||||||||||||
Із епюри M P (Рис. 18а ) в основній системі вирізаємо вузол 1 (Рис.18в) 1 з |
|||||||||||||||||||||||
умови рівноваги моментів знаходимо: R |
ql2 0 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1p |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
Рис.19а |
Рис.19в |
|
На епюрі |
|
1 (Рис.19а) робимо переріз (а-а) |
і складаємо рівняння рівноваги |
|||
M |
||||||
сил на горизонталь |
r |
6 i 0 |
|
|||
|
|
|
21 |
l |
|
|
|
|
|
|
|
|
|

Зрівноважуючи моменти в вузлі 1 (Рис.19в) ,знаходимо r11 7i 0
ЕпюраM 2 від Z2 =1 представлена на Рис. 20а
Із умови рівноваги горизонтальних сил (Рис.20.а) та моментів в вузлі 1, (Рис.20.в) знаходимо
r12 6i / l2 0 r22 15i / l2 0
|
|
Рис.20а |
|
|
|
|
|
|
Рис.20в |
||||
Система канонічних рівнянь має вигляд |
|
|
|
|
|
||||||||
|
|
|
7 X1 6Z2 |
|
|||||||||
|
|
|
6X1 15Z2 8 |
||||||||||
|
|
де X |
|
|
Z l; |
ql3 |
|
||||||
|
|
1 |
i |
||||||||||
|
|
|
|
|
|
1 |
|
|
|||||
Рішення системи буде |
Z |
|
11ql2 |
|
; Z |
2 |
|
50ql3 |
|
||||
|
|
||||||||||||
|
1 |
|
23i |
|
|
|
|
|
69i |
||||
|
|
|
|
|
|
|
|
|
|||||
Епюру М (Рис.21) знаходимо по формулі
M M P M 1Z1 M 2 Z2

Рис.21 Епюру Q (Рис.22) знаходимо по формулі
Q QP dsd ( M 1Z1 M 2 Z2 )
Із епюри Q (Рис.22) вирізаємо вузли 1,2 (Рис.23а) і з умови рівноваги на вертикаль і горизонталь знаходимо
N1 3,57ql 0; N2 2,17ql 0; N3 4,43ql 0
Епюра N представлена на Рис.23в.
Рис.22 |
Рис.23а |
Рис.23в |

§7 Метод скінчених елементів.
Розділимо балку на частини, які будемо називати елементами (Рис. 24). Нехай вузлиi, j окремого елемента жорстко (З-З) зв’язані з балкою. В таких вузлах як балка так і елемент мають одинакові зміщення yi і кути i повороту при деформації. Якщо в точці i балка і елемент зв’язані шарніром (Ш), то однаковим буде тільки зміщення yi .Це зміщення і приймемо за одне невідоме
MI |
M q |
MJ x |
|
|
|
||
|
|
|
|
i |
p |
EI |
j |
QI |
|
|
QJ |
y |
a |
|
|
|
|
|
|
|
l |
|
|
Рис.24
такого вузла. Якщо ж балка і елемент в вузлі i зв’язані шарнірно-рухомою опорою ,то однаковим для балки і елемента буде кут повороту i ,який і приймемо за невідоме зміщення цього вузла. В жорстких вузлах i, j виникають сили і моменти, додатні значення яких показані на (рис.24)
.Додатні Qi ,Qj направлені вниз, а додатніMi , M j направлені по годинниковій стрілці. В шарнірному та шарнірно-рухомому вузлі виникають відповідно тільки Qi або Mi .Для елемента з жорсткими вузлами вводимо вектори
вузлових переміщень (i) та вузлових сил F (i)