

ргр 2007 теоретична механіка
.pdfМіністерство освіти і науки, молоді та спорту України
Національний технічний університет України «Київський політехнічний інститут»
ТЕОРЕТИЧНА МЕХАНІКА.
Динаміка та аналітична механіка
Методичні вказівки до виконання розрахунковографічної роботи (РГР) для студентів технічних напрямів підготовки денної та заочної форм навчання
Київ
НТУУ «КПІ»
2013
Теоретична механіка. Динаміка та аналітична механіка. Методичні вказівки до виконання розрахунково-графічної роботи (РГР) для студентів технічних напрямів підготовки денної та заочної форм навчання. Навчальне електронне видання/ Уклад.: В.Г.Савін, В.М.Федоров, Н.І.Штефан – К.:НТУУ “КПІ”, 2013. - 35с.
Гриф надано Методичною радою НТУУ «КПІ»
Навчальне електронне видання
ТЕОРЕТИЧНА МЕХАНІКА.
Динаміка та аналітична механіка
Методичні вказівки до виконання розрахунково-графічної роботи (РГР) для студентів
технічних напрямів підготовки денної та заочної форм навчання
Укладачі: Савін Віктор Гурович,докт. техн.. наук, проф.
Федоров Володимир Миколайович, канд. техн. наук, доц. Штефан Наталія Іллівна, канд. техн. наук, доц.
Відповідальний редактор: О.М.Юдін, канд. техн. наук, доц.
Рецензент: М. Г. Черняк, канд. техн. наук, доц.
2
ВСТУП Рівень фахової кваліфікації інженера визначається не тільки вмінням
виконувати поставлені завдання, застосовуючи сучасні методи дослідження, а й здатністю надавати достовірний, перевірений результат в якомога більш загальному вигляді.
Достовірність результату можна забезпечити, проаналізувавши розмірності складових в отриманих співвідношеннях, але це дозволяє знайти тільки частину можливих помилок. Повністю достовірний результат може бути отриманий тільки після вирішення поставленої задачі принципово іншим методом, в разі, коли отримані результати стовідсотково збігаються.
Дані методичні рекомендації спрямовані на формування у студента розуміння того беззаперечного факту, що вирішення будь-якої задачі різними методами, коли вони застосовані коректно, приводить до одного й того ж результату. Кожен з методів краще (компактніше, скоріше і т.п.) вирішує певний клас задач (знаходження активних сил, реакцій в’язей, законів руху точок і твердих тіл і т. і.), і гірше пристосований для вирішення інших задач. Але,
зважаючи на те, що розв’язання реальних задач потребує стовідсоткової вірогідності, спеціаліст повинен вміти застосовувати всі доступні йому методи вирішення задачі.
Згідно робочим навчальним програмам дисципліни “Теоретична механіка” студенти після засвоєння теоретичної [1-4] та практичної [5-8] частини “Динаміка та аналітична механіка” повинні вміти розв’язувати задачі з дослідження динаміки механічної системи з використанням загальних теорем динаміки та принципів аналітичної механіки.
Методичні вказівки відносяться до частини теоретичної механіки “Динаміка та аналітична механіка” та охоплюють розділи: “Основні теореми динаміки.
Теорема при зміну кінетичної енергії механічної системи”, ”Метод кінетостатики”, ”Динаміка твердого тіла”, ”Принцип можливих переміщень і принцип Д’Аламбера-Лагранжа”, “Рівняння Лагранжа другого роду”. Крім того, в
методичних вказівках повторюються відомості із статики та кінематики, що є необхідними для розуміння матеріалу, який викладається.
3
Предметною основою матеріалу методичної розробки є сформульована в
[7, стор.231-236] розрахунково-графічна робота “Застосування теореми про зміну кінетичної енергії для вивчення руху механічної системи”. В ній необхідно знайти прискорення тіла, що здійснює поступальний рух в складі механічної системи з заданими масо-габаритними характеристиками, яка починає рухатись із стану спокою.
Відмінними особливостями цих методичних вказівок є те, що:
1)в розрахунковій роботі за допомогою теореми про зміну кінетичної енергії системи треба знайти кінематичний параметр, вказаний в таблиці – це може бути поступальне прискорення тіла; кутове прискорення тіла, що обертається навколо нерухомої вісі; кутове прискорення тіла, що рухається плоскопаралельно, чи прискорення його центра мас. Це суттєво розширює кількість варіантів, що дозволяє кожному студенту працювати індивідуально;
2)результат – прискорення - представляється в аналітичній формі, тобто у вигляді формули, отримання якої здійснюється без будь-яких спрощуючих співвідношень між масами, величинами радіусів та ін. Чисельні дані серед вхідних параметрів відсутні, дані наведені тільки в “літерному” вигляді;
3)крім теореми про зміну кінетичної енергії механічної системи в методичних вказівках для отримання необхідного результату використовуються
-принцип Д’Аламбера-Лагранжа;
-рівняння Лагранжа 2 роду;
-метод кінетостатики.
Отримана всіма чотирма різними методами формула для визначення заданого завданням кінематичного параметру повинна повністю збігатися з отриманою іншими методами.
В представлених методичних вказівках подані 30 варіантів завдань розрахунково-графічної роботи з динаміки та аналітичної механіки, відповідно в кожному з них сформульовано запитання.
Після цього окремо проведено розв’язання демонстраційної задачі чотирма методами, що зазначені вище. До кожного з них наведені короткі теоретичні
4
відомості. В результаті показано, що отримані в усіх методах відповіді збігаються.
Завдання до РГР
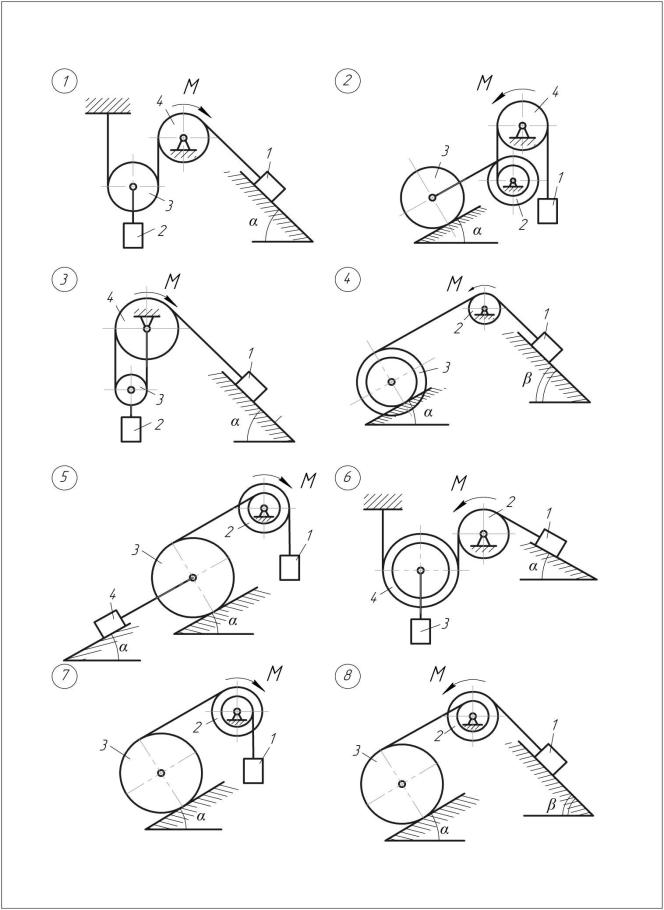
Механічна система, зображена на рис.1, являє собою декілька тіл, зв’язаних між собою невагомими нерозтяжними нитками. Вона починає рухатись із стану спокою під дією сил ваги, а також момента пари сил, прикладеного до диска з нерухомою віссю обертання.
Вважаємо відомими:
-маси всіх тіл – = 1,2,3,4 ;
-радіуси дисків – та ;
-радіуси інерції східчастих дисків − ,
-кути і нахилу похилих площин відносно площини горизонту;
-коефіцієнт тертя ковзання тіл, що здійснюють поступальний рух по нерухомим поверхням (безрозмірний);
-коефіцієнт тертя кочення тіл, що котяться без ковзання по нерухомим поверхням (розмірність – метр).
Треба знайти кінематичний параметр, вказаний в таблиці 1.
5
|
|
|
|
|
|
|
Табл.1 |
|
|
|
|
|
|
|
|
Варіант |
|
Кінематичний параметр, що його треба знайти |
|
||||
|
|
|
|
|
|
|
|
|
a |
|
b |
c |
d |
|
e |
|
|
|
|
|
|
|
|
1 |
1 |
|
4 |
3 |
3 |
|
2 |
2 |
3 |
|
1 |
4 |
2 |
|
3 |
3 |
3 |
|
2 |
1 |
4 |
|
3 |
4 |
3 |
|
3 |
2 |
1 |
|
2 |
5 |
2 |
|
3 |
3 |
4 |
|
1 |
6 |
1 |
|
2 |
4 |
4 |
|
3 |
7 |
2 |
|
1 |
2 |
3 |
|
3 |
8 |
3 |
|
1 |
1 |
2 |
|
3 |
9 |
3 |
|
3 |
2 |
1 |
|
2 |
10 |
4 |
|
3 |
3 |
2 |
|
1 |
11 |
1 |
|
2 |
3 |
3 |
|
1 |
12 |
4 |
|
1 |
2 |
3 |
|
3 |
13 |
3 |
|
3 |
1 |
2 |
|
4 |
14 |
3 |
|
3 |
4 |
1 |
|
2 |
15 |
2 |
|
4 |
3 |
3 |
|
1 |
16 |
1 |
|
2 |
4 |
3 |
|
3 |
17 |
4 |
|
1 |
2 |
3 |
|
3 |
18 |
3 |
|
3 |
1 |
2 |
|
4 |
19 |
3 |
|
3 |
4 |
1 |
|
2 |
20 |
2 |
|
3 |
3 |
2 |
|
1 |
21 |
1 |
|
2 |
3 |
3 |
|
3 |
22 |
3 |
|
1 |
2 |
4 |
|
3 |
23 |
3 |
|
4 |
1 |
2 |
|
3 |
24 |
3 |
|
3 |
3 |
1 |
|
2 |
25 |
2 |
|
3 |
3 |
2 |
|
1 |
26 |
1 |
|
2 |
3 |
3 |
|
2 |
27 |
3 |
|
1 |
2 |
4 |
|
3 |
28 |
3 |
|
4 |
1 |
2 |
|
3 |
29 |
3 |
|
3 |
2 |
1 |
|
2 |
30 |
2 |
|
3 |
3 |
4 |
|
1 |
6
7

8

9

10