

2. Разработать блок-схему алгоритма нахождения значений функции для задаваемого пользователем диапазона и шага измененияx, используя разные типы циклов: со счетчиком, с предусловием, с постусловием.
3. Байесовское оценивание. Теорема Байеса как основа управления неопределенностью.
Байесовское оценивание.
Пусть А нек-ое событие реального мира.
Сов-ть всех событий наз. выборочным пространством или пространством событий.-Ω
Вероятность событий Р(А)-должно удовл. 3-ем аксиомам:
Вероятность любого события явл. неотрицательной.
Р(А)>=0 для ¥А € Ω
Вероятность всех событий выборочного пространства =1
( Р (Ω)=1)
Если несколько событий явл. взаимнонезависимыми (т.е. не могут произойти одновременно), то вероятность, по крайней мере, одного из этих событий равна сумме этих вероятностей.
k
Р(А1 U A2 U…Ak)=∑ P(A1)
i=1
1<=P(A)<=0
Пусть ךּА есть дополнение к А
ךּА содержит совокупность всех событий в пространстве за искл.А
ךּА и А явл. взаимнонезависимыми событиями, т.е. ךּА U A =Ω
P(A)+P(ךּА) = P(A U ךּА) = P(Ω)=1
P(ךּА)=1-P(A)
Пусть есть В € Ω, тогда вероятность того, что произошло А при условии, что произошло В
наз. условная вероятность события А при заданном событии В : В € Ω, тогда Р(А│В)
Вероятность того, что оба события произойдут наз. совместимая вероятность события Аи В:
В € Ω, тогда Р(А∩В)
Выражая условную вероятность ч/з совместную получим:
P(A│B)=P(A∩B)/P(B) (1)
P(B│A)=P(B∩A)/P(A)
Совместимая вероятноять коммутативна, когда P(B∩A)=P(A∩B)= P(B│A)*P(A) (2)
Подставим в (2) в (1), тогда получим правило Байеса:
P(A│B)=( P (B│A)* P(A) )/ P(B)
Если одно событие не влияет на другое, то P(A│B)= P(A), P(B│A)= P(B)- частный случай.
теорема Байеса, как основа управления неопределенностью.
Пусть имеется события А и В. Они явл. непересекающимеся множествами. Тогда объединение множеств соот-ет суме вероятностей, а пересечение соот. произведению.
P(A U B)=P(A)+P(B)
P(A ∩ B)=P(A)*P(B)
B=(B∩A) U (B ∩ ךּА)
P(B)= (B∩A)+ (B ∩ ךּА)= P(B│A)*P(A)+ P(B │ ךּА)*P(ךּA) (3)
Подставим (3) в правило Байеса, получим теорему Байеса
P(A│B)=
P(B│A)*P(A) / P(B) = P(B│A)*P(A) / P(B│A)*P(A)+ P(B │
ךּА)*Р(ךּA)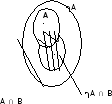
Билет №19
1. Оценка точности и достоверности результатов моделирования.
 -
точность
-
точность
X СР – оценка величины
Х – истинное значение
 -
уровень значимости
-
уровень значимости
α и ε – задаем сами
( 1 – α ) – достоверность
Определение количества реализаций для оценки вероятности наступления событий (Степень точности определяется количеством реализаций):
 -
квантинормальное распределение
вероятности. Находится из специальных
таблиц распределения Стьюдента на
основе уровня значимости и степени
свободы.
-
квантинормальное распределение
вероятности. Находится из специальных
таблиц распределения Стьюдента на
основе уровня значимости и степени
свободы.
Число
степеней свободы:
 ,
гдеq
– число определенных параметров.
,
гдеq
– число определенных параметров.
Для определения P делают пробные прогоны (n=50-100) и получают частоту:

Определяется количество реализаций для оценки среднего значения случайной величины:

Если известен допустимый размах переменной отклика, то дисперсия случайной величины:
