Вывод формулы для вычисления вероятности ошибки при регистрации методом стробирования
Рассмотрим случай, когда регистрация единичных элементов осуществляется методом стробирования. На рисунке 10 приведен единичный элемент 0 , отмечен оптимальный момент регистрации МР.
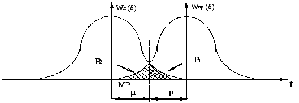
Рисунок 11 – График распределения плотностей вероятности.
Плотность вероятностей смещения левой и правой границ единичного элемента обозначены соответственно Wл(δ) и Wпр(δ). Ошибочная регистрация элемента 0 произойдет в следующих случаях: левая или правая граница единичного элемента сместится вправо на величину |δ|≥μ, одновременно обе границы сместятся внутрь единичного элемента и смещение превысит исправляющую способность приемника μ.
Вероятность ошибочной регистрации Pош = P1 +P2 – P1P2 , где P1и P2 – соответственно вероятности смещения левой и правой границ на величину больше μ. Как видно из рисунка 11:


Устройство поэлементной синхронизации вырабатывает синхроимпульсы с некоторым смещением (погрешностью ε). В этом случае:



Плотности
вероятности смещения левой и правой
границ единичного элемента.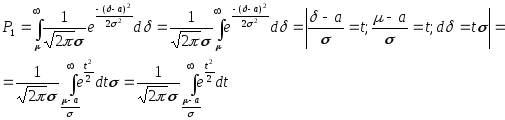 Т.к.
Wл(δ)
и Wпр(δ)
описываются Гауссовским законом с
параметрами а и σ, то Р1
и Р2
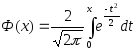
можно выразить через функцию Крампа:
Т.к.
Wл(δ)
и Wпр(δ)
описываются Гауссовским законом с
параметрами а и σ, то Р1
и Р2
можно выразить через функцию Крампа:
 ,
что и было сделано раньше.
,
что и было сделано раньше.

![]()
Решение задач
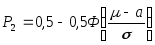
Задача№1.Начертить временную диаграмму сигнала на выходе модулятора, вид модуляции и передаваемая последовательность приведены в таблице.
Дано:
Вид модуляции: Двукратная относительно - фазовая модуляция.
Передаваемая последовательность: 001011 01 10 11
Решение:
При ДОФМ два соседних сигнала могут отличаться по фазе на одно из четырех возможных значений. Диаграмма ДОФМ на сигнальной плоскости выглядит так:

Рисунок 12 – Диаграмма ДОФМ.
Вычислим фазы сигнала для каждой пары единичных элементов:
|
φ1 =2700
φ2 =2700+1800=900
φ3=900+900=1800
φ4 =1800+00=1800
φ5 =1800+ 1800=00
φ6 =00+900=900
φ1 =2700 |
Рисунок 13 – Временная диаграмма сигнала на выходе демодулятора |
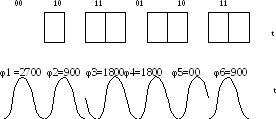
Задача№2.
Начертить временные диаграммы сигналов на выходе каждого из элементов регистрирующего устройства, если используется интегральный (N-четное) или метод стробирования (N-нечетное), а так же заданы значащие моменты сигнала на входе регистрирующего устройства (в таблице – первый ЗМ означает переход от «0» к «1», общая длительность сигнала составляет 10τ0). Стробирующий импульс предполагается бесконечно узким, длительностью которого можно пренебречь. Длительность единичного элемента выбрать самостоятельно.
Дано:
Метод регистрации: интегральный.
Значащие моменты:
|
0,1τ0 |
3,3 τ0 |
4,0 τ0 |
5,2 τ0 |
5,9 τ0 |
6,7 τ0 |
7,3 τ0 |
7,8 τ0 |
8,7 τ0 |
9,3 τ0 |
Решение:

Рисунок 14 – Схема регистрирующего устройства.
 Рисунок
15 – Временные
диаграммы сигналов на выходе каждого
из элементов регистрирующего устройства.
Рисунок
15 – Временные
диаграммы сигналов на выходе каждого
из элементов регистрирующего устройства.
Синхронизация в системах пдс Классификация систем поэлементной синхронизации
Различают поэлементную, групповую и цикловую синхронизацию. Поэлементная синхронизация позволяет на приеме правильно отделить один элемент от другого и обеспечить наилучшие условия для его регистрации. Групповая синхронизация обеспечивает правильное разделение принятой последовательности на кодовые комбинации, а цикловая синхронизация - правильное разделение циклов временного объединения элементов на приеме. Обычно задачи цикловой и групповой решаются одними и теми же методами.
Системы синхронизации можно классифицировать последующим признакам:
а) прохождение синхросигналов.
б) способ формирования синхросигналов.
Прохождение синхросигналов
Синхронизирующие импульсы в пункте приема могут быть получены тремя способами: от высокостабильного источника колебаний, который является эталоном отсчетов времени, путем передачи отсчетов времени (синхронизирующие импульсы) от передатчика к приемнику по отдельному каналу (синхроканалу) и путем получения информации об отсчетах времени из информационной последовательности единичных элементов.
Первый способ применим в тех случаях, когда время сеанса связи, включая время вхождения в связь, не превышает время сохранения синфазности. Второй способ достаточно эффективен, однако требует создания отдельного канала синхронизации, что снижает пропускную способность канала связи. Как правило, этот способ применяется в групповых многоканальных синхронных системах связи. Третий способ позволяет более эффективно использовать пропускную способность системы связи и обеспечить приспособляемость (адаптацию) устройств фазирования и синхронизации к изменяющимся параметрам канала связи. Основной недостаток способа состоит в зависимости точности синхронизации от искажений принимаемых информационных сигналов и структуры информационных последовательностей единичных элементов. Несмотря на указанные недостатки, третий способ нашел преимущественное применение в системах передачи дискретной информации и телеграфной техники.
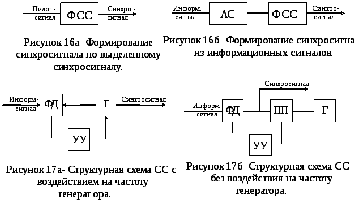
Способ формирования синхросигналов
По этому способу системы синхронизации разделяют на разомкнутые (без обратной связи) и замкнутые (с обратной связью). В разомкнутых СС синхросигнал (тактовые импульсы) формируются либо из сигналов, принимаемых по специальному выделенному синхроканалу (рисунок16а), либо из информационных сигналов с помощью анализатора сигнала АС и формирователя синхронного сигнала (рисунок16б). АС предназначен для извлечения из информационного сигнала сведений о положении ЗМ. ФСС под действием сигналов с АС формирует синхросигналы в определенной фазе по отношению к информационным сигналам.
В замкнутых СС синхросигнал вырабатывается генератором синхроимпульсов. В АС производится сравнение фазового положения синхроимпульсов и положения ЗМ приходящих информационных сигналов. При рассогласовании фаз вырабатывается управляющий сигнал, корректирующий работу синхроимпульсов. Таким образом, АС представляет собой устройство с ФАПЧ и состоит из фазового дискриминатора и управляющего устройства. Различают замкнутые СС с непосредственным воздействием на частоту генератора (рисунок17а) и без непосредственного воздействия на частоту генератора (рисунок17б). В первом случае корректирующее фазы синхросигналов достигается изменением параметров колебательного контура генератора синхросигналов, во втором - воздействием на промежуточный преобразователь частоты, как правило, на делитель частоты. Весьма существенно, что замкнутые СС предусматривают только режим непрерывной синхронизации, т.е. могут использоваться лишь в синхронных системах связи.