

metodichka_molekulyarka_i_mekhanika
.pdfторой зафиксирован верхний кронштейн 7 и нижний 4 с фотоэлектрическим датчиком 11.
После отвинчивания воротка 8 верхний кронштейн можно поворачивать вокруг колонки. Затягивание воротка фиксирует кронштейн в любом положении. С одной стороны кронштейна 7 находится математический маятник 5, с другой стороны – на вмонтированных вкладышах оборотный маятник 10.
Длину математического маятника можно регулировать при помощи воротка 6, а ее величину можно определить при помощи шкалы на колонке 9.
Оборотный маятник выполнен в виде стального стержня, на котором фиксированы два повернутых друг к другу лезвиями ножа и два ролика.
На стержне через 10 мм выполнены кольцевые нарезания, служащие для точного определения длины оборотного маятника (расстояния между ножами). Ножи и ролики можно перемещать вдоль оси стержня и фиксировать в любом положении. Эти элементы выполнены таким образом, что их размер вдоль стержня кратен 10 мм, а фиксирующие воротки размещены таким образом, чтобы при помощи кольцевых нарезок можно было их наглухо блокировать.
Нижний кронштейн вместе с фотоэлектрическим датчиком можно перемещать вдоль колонки и фиксировать в произвольно избранном положении.
Фотоэлектрический датчик соединен разъемом с привинченным к основанию универсальным миллисекундомером.
Порядок выполнения работы
1. Определите величину ускорения свободного падения. Для этого измерьте период колебаний Т маятника при нескольких значениях длины подвеса, чтобы уменьшить относительную погрешность ε. Вычислите g с помощью формулы (3).
51

2. Оцените погрешность проведенных измерений и запишите полученный результат в виде g = g ± g .
3.Определите период колебаний физического маятника при положениях грузов, заданных преподавателем.
4.Зная ускорение свободного падения, вычислите по формуле (4) приведенную длину физического маятника.
5.Установите полученную длину на математическом маятнике. Измерьте период колебаний математического маятника и сравните с периодом колебаний физического маятника.
6.Определите ускорение свободного падения с помощью оборотного маятника. Для этого:
а) закрепите подвижные грузы на стержне в положениях, приблизительно соответствующих указанным на рис. 3. Передвигая стержень по опорной площадке штатива, определите приближенно положение центра масс С маятника;
б) укрепите одну из подвижных призм справа на наиболь-
шем возможном расстоянии a1 от центра масс. Определите период колебаний маятника Т(а1) при данном положении опорной призмы по времени, за которое маятник совершает 10 колебаний малой амплитуды (≤ 4 – 6°);
в) укрепляя вторую подвижную призму левее центра масс на
небольшом расстоянии a2 от него, добейтесь совпадения периода колебаний Т(а2) в этом положении с ранее найденным периодом колебаний Т(а1). Равенство Т(а1) =Т(a2) должно выполняться с
точностью (1 ... 2)10−3c ;
г) измерьте расстояние между призмами (a1 + a2), пo формуле (6) определите величину ускорения свободного падения g. При вычислениях следует учесть, что период колебаний Т в (6) равен
T = T (a1 ) = T (a2 ) ;
д) найдите погрешности величины T и оцените относительную погрешность g g.
g.
52
Дополнительные задания
1.Построить зависимость периода колебаний маятников от амплитуды.
2.Выясните влияние затухания на период колебаний. Для этого определите число колебаний N, за которое амплитуда колебаний маятника уменьшится примерно в 3 раза.
3.Оцените по измеренным данным (п. 2) величину коэффициента затухания и добротность математического маятника.
Контрольные вопросы
1.Какова будет длина математического маятника с периодом Т = 1 с на широте г. Владимира?
2.Получите уравнение для математического маятника с учетом затухания. Из полученного выражения найдите коэффициент затухания, период и частоту собственных колебаний, считая, что трение обусловлено вязким трением шарика о воздух.
3.Используя измеренное значение периода колебаний математического маятника, оцените максимальную силу вязкого трения шара радиусом R о воздух, движущегося со скоростью v, если на него действует сила Fст = 6πηRv, где коэффициент вязкости
для воздуха равен η = 1,7 10−5 Па с.
На основании ваших опытов оцените добротность маятника и время релаксации τ = T0Q – время установки колебаний.
Список рекомендуемой литературы
1.Савельев, И. В. Курс общей физики. В 5 кн. Кн. 1. Механика / И. В. Савельев. – М. : АСТ:Астрель, 2005. – 336 с. – ISBN 5-17-002963-2.
2.Каленков, С. Г. Практикум по физике. Механика / С. Г. Каленков, Г. И. Соломахо. – М. : Высш. шк., 1990. – 112 с.
53
Лабораторная работа № 1-7
ОПРЕДЕЛЕНИЕ ГЛАВНЫХ МОМЕНТОВ ИНЕРЦИИ МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
Цель работы: изучение крутильных колебаний. Экспериментальное определение главных моментов инерции симметричных тел правильной формы.
Оборудование: прибор FРМ-05.
Введение
Момент инерции тела относительно некоторой оси характеризует инертные свойства тела при вращательном движении.
Оказывается, что для любого твердого тела существуют три главные взаимно перпендикулярные оси, проходящие через его центр инерции (главные оси инерции тела), такие, что момент инерции тела относительно любой оси выражается через моменты инерции тела I1, I2, I3 относительно этих главных осей. При этом если I1> I2> I3 , то I1 – максимально возможный момент инерции для данного тела относительно оси, проходящей через центр массы, I3 – наименьший момент инерции, а I2 = (I1 + I3 ) 2.
2.
Задача определения момента инерции тела относительно произвольной оси сводится к определению главных осей и соответствующих им моментов инерции.
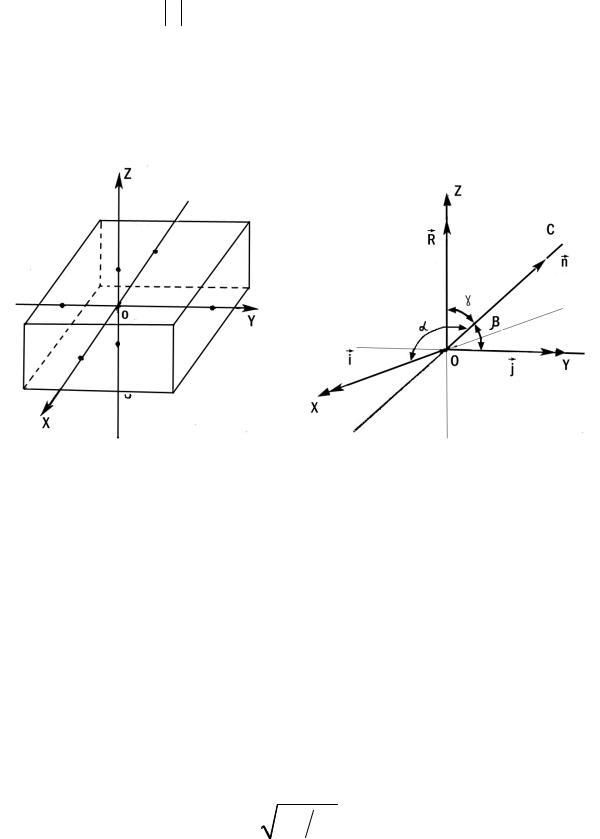
Главные оси легко определить для однородных симметричных тел (шара, куба, цилиндра, прямоугольного параллелепипеда и т.д.). Для таких тел главные оси инерции всегда совпадают с осями симметрии тела. Например, главные оси однородного прямоугольного параллелепипеда проходят через его геометрический центр перпендикулярно к граням (рис. 1).
Момент инерции твердого тела относительно произвольной
оси, определяемой единичным вектором |
|
|
nG |
= {cosα,cosβ,cos γ} , |
(1) |
|
54 |
|
nG 2 = cos2 α + cos2 β + cos2 γ = 1 ,
где α, β, γ – углы между направлением вектора и осями координат ОX, ОY и ОZ (рис. 2), можно выразить через главные моменты инерции
I (nG) = Ix cos2 α + Iy cos2 β + Iz cos2 γ . |
(2) |
Рис. 1 |
Рис. 2 |
Соотношение (2) |
справедливо, если координатные оси ОХ, |
ОY, ОZ являются главными осями тела. Из (1) и (2) видно, что величины Ix, Iy и Iz – моменты инерции тела относительно его главных осей ОX, ОY, ОZ. Если, например, направить n вдоль оси ОX, то I (nG) = Ix и т.д. Формула (2) описывает изменение момента
инерции тела при изменении направления оси вращения.
Цель данной работы – проверка этого соотношения. Для определения моментов инерции применяется метод крутильных колебаний. Исследуемое твердое тело жестко закрепляется в рамке крутильного маятника, подвешенной на упругой вертикальной проволоке. Если вывести маятник из положения равновесия, то он будет совершать колебания. Период этих колебаний
T = 2π Im D , |
(3) |
где D – постоянная момента упругих сил, Im – момент инерции маятника.
55

Выражение для периода собственных колебаний легко получить, применив основной закон динамики вращательного движения, учитывая, что при кручении возникают упругие силы деформации сдвига, момент которых пропорционален углу поворота M = −Dθ . Из формулы (3) следует, что момент инерции можно получить, если измерять период колебаний, зная при этом упругие свойства подвеса.
Момент инерции маятника складывается из момента инер-
ции рамки I0 и момента инерции I исследуемого тела |
Im = I0 + I. |
Поэтому период колебаний маятника можно записать в виде |
|
T = 2π (I0 + I ) D . |
(4) |
Если колеблется свободная рамка без тела, то ее период ко- |
|
лебаний |
|
T0 = 2π I0 D . |
(5) |
Из этих сравнений можно исключить неизвестную величину |
|
D. В результате находим |
|
I = I0 (T 2 − T02 ) T02 . |
(6) |
Полученное соотношение позволяет выразить момент инерции тела I относительно оси маятника через момент инерции I0 свободной рамки. Для этого нужно измерить периоды колебаний Т0 и Т соответственно для свободной рамки и для рамки с телом. Период колебаний Т так же, как и момент инерции тела I , зависит от ориентации тела по отношению к оси маятника. Чтобы
подчеркнуть это, запишем (6) в виде |
|
|
|||
|
I (nG) = I |
0 |
(T 2 (nG) − T 2 ) |
T 2 . |
(7) |
Здесь nG |
|
0 |
0 |
|
|
– единичный вектор, направленный вдоль оси ма- |
|||||
ятника. В лабораторной установке ось маятника (она же ось вращения тела) направлена по вертикали. Поэтому во всех опытах следует считать, что единичный вектор n направлен вертикально вверх. Момент инерции тела относительно вертикальной оси (т.е. величину I (nG)) изменяют, поворачивая тело и закрепляя его в
56
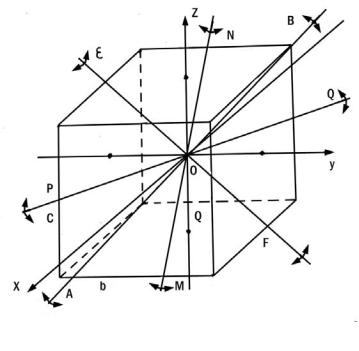
различных положениях по отношению к этой оси (рис. 3). Направив оси ОХ, ОY и ОZ вдоль главных осей тела, мы тем самым выбрали систему координат ОXYZ, жестко связанную с телом. Вектор nG (ось вращения) всегда направлен вертикально вверх, поэтому, поворачивая тело, мы изменяем направление вектора n в жестко связанной с телом системе координат.
Рис. 3
Закрепим тело в рамке так, чтобы ось вращения nG совпадала с какой-либо его главной осью ОХ, ОY или ОZ.
Тогда из (7) получим
|
T 2 |
− T 2 |
|
|
Ty2 − T 2 |
|
T 2 |
− T 2 |
|
|
||||||
Ix = I0 |
x |
|
|
0 |
, |
I y = I0 |
|
|
0 |
, Iz = I0 |
z |
|
|
0 |
, |
(8) |
T |
2 |
|
T |
2 |
|
T |
2 |
|
||||||||
|
|
0 |
|
|
|
0 |
|
|
|
0 |
|
|
|
|||
где Тx, Ty, Tz – соответственно периоды колебаний маятника в случае совпадения оси вращения c одной из главных осей ОХ, ОY или ОZ .
Подставив (7) и (8) в исходное соотношение (2), получим
T 2 (nG) = T 2 cos2 |
α + T 2 cos2 |
β + T 2 cos2 |
γ . |
(9) |
x |
y |
z |
|
|
Таким образом, существует простая связь между периодами крутильных колебаний тела Тx, Тy и Tz относительно его осей
57

симметрии ОХ, ОY и ОZ и периодом колебаний этого же тела относительно оси nG с направляющими косинусами.
Будем проверять рабочую формулу (9) для простого случая, когда исследуемое твердое тело имеет форму прямоугольного параллелепипеда. Обозначим длину ребер параллелепипеда a, b и c. Исследуем три образца: куб (a = b = c), симметричный параллелепипед (a = b, c ≠ a) и параллелепипед, у которого длины всех трех ребер различны (a ≠ b, b ≠ c, a ≠ c).
1. Однородный куб. Если все три момента инерции куба относительно главных осей ОХ, ОY и ОZ одинаковы, то Ix = I y = Iz.
Тогда период крутильных колебаний куба должен быть одинако-
вым для любой оси вращения, проходящей через его центр |
|
T (n) = Tx = const . |
(10) |
Проверить это можно, закрепляя куб в рамке в различных положениях, при которых ось вращения проходит через центр куба, и измеряя соответствующие периоды крутильных колебаний.
2. Симметричный прямоугольный параллелепипед. Так как
Ix = Iy, то Тx = Тy , тогда получаем |
|
I (nG) = I (x)(1− cos2 γ )+ Iz cos2 γ ; |
(11) |
T 2 (nG) = Tx2 (1− cos2 γ )+ Tz2 cos2 γ . |
(12) |
Таким образом, период крутильных колебаний |
T (nG) зави- |
сит только от угла γ, который ось вращения n образует с осью тела ОZ. Величина T (nG) не зависит от углов α и β (при γ = const). В частности, должен быть одинаковым период колебаний отно-
сительно оси, лежащей в плоскости ОXY (т.е. при |
γ = π 2 ). В |
этом случае cos γ = 0 и согласно (12) |
|
T (n) = Tx = const . |
(13) |
Можно проверить это соотношение, закрепляя в рамке крутильного маятника симметричный параллелепипед так, чтобы ось
58

вращения была перпендикулярна его большему ребру. Периоды крутильныхколебанийприлюбомтакомположениидолжнысовпадать.
3. Несимметричный параллелепипед. Если ось вращения совпадает с главной диагональю AB (см. рис. 3), то, вычислив направляющие косинусы, найдем:
T 2 |
(a2 + b2 + c2 ) = T 2a2 |
+ T 2b2 |
+ T 2c2 . |
(14) |
AB |
x |
y |
z |
|
Аналогично для осей εF, MN и PQ (см. рис. 3) следует
Tε2 (b2 + c2 ) = T2b2 + T 2c2 ;
F y z
T 2 |
(a2 + c2 ) = T 2a2 + T 2c2 |
; |
(15) |
||
MN |
|
x |
z |
|
|
T 2 (a2 + b2 ) |
= T 2a2 |
+ T 2b2 . |
|
|
|
PQ |
|
x |
y |
|
|
Таким образом, для проверки формулы (8) в случае несимметричного параллелепипеда можно выяснить, выполняются ли соотношения (14) и (15) для измеренных значений периодов колебаний.
Для определения момента инерции рамки можно воспользоваться эталонным телом, момент инерции которого IЭ известен. Тогда согласно (7) имеем
I0 = IЭT02 (TЭ2 − T02 ), |
(16) |
где TЭ – период колебаний рамки с закрепленным в ней эталонным телом. В качестве эталонного тела в работе используется однородный куб. Момент инерции такого куба относительно проходящей через его центр оси можно вычислить по формуле
I |
Э |
= 1 ma2 |
, |
(17) |
|
6 |
|
|
где m – масса куба; a – сторона куба.
Вычислив IЭ по формуле (17), можно измерить периоды колебаний свободной рамки Т0 и рамки с кубом ТЭ и затем определить искомую величину I0 из соотношения (16).
59
Описание установки
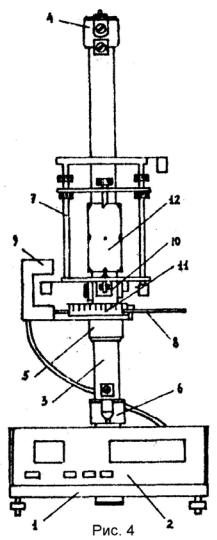
К основанию 1 прибора FPM-05 (рис. 4), оснащенному четырьмя ножками с регулируемой высотой, прикреплен миллисекундомер 2 (FFM-14). В основании закреплена колонка 12, на которой при помощи прижимных винтов закреплены кронштейны 8, 11, 3. Кронштейны 8 и 3 имеют зажимы для закрепления стальной проволоки, на которой подвешена рамка 9. На кронштейне 11
|
|
|
|
|
|
|
|
|
|
|
закреплена стальная плита 4, которая |
|
|
|
|
|
8 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
служит основанием фотоэлектрическому |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
датчику 10, электромагниту 6 и угловой |
|
|
|
|
|
|
|
|
|
|
|
|
шкале 5. |
|
|
|
|
|
|
|
|
|
|
|
|
Электромагнит может смещаться |
|
|
|
|
|
|
|
|
|
|
|
|
на плите, а его положение относительно |
|
|
|
|
|
|
|
|
|
|
|
|
фотоэлектрического датчика показывает |
|
|
9 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
на угловой шкале стрелка, прикреплен- |
||
|
|
|
|
|
|
7 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ная к электромагниту. |
|
|
|
|
|
|
|
|
|
|
|
||
10 |
|
|
|
|
|
6 |
|
|||||
|
|
|
|
|
|
|
Конструкция рамки позволяет за- |
|||||
|
|
|
|
|
|
|
|
5 |
|
|
||
|
|
|
|
|
|
|
|
|
|
крепить грузики 7, значительно отли- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чающиеся друг от друга по внешним |
|
|
|
|
|
|
|
|
|
|
|
размерам. Грузики крепятся при помощи |
|
|
|
|
|
|
|
|
|
4 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
подвижной балки, которая перемещается |
|
11 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
3 |
|
по направляющим между неподвижны- |
|||
|
|
|
12 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
ми балками. Балка устанавливается затя- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гиванием гаек на зажимных втулках, |
|
|
|
|
|
|
|
|
|
|
|
|
помещенных на подвижной балке. |
|
|
|
|
|
|
|
|
|
|
|
|
Фотоэлектрический датчик и элек- |
|
|
|
1 |
|
|
|
2 |
|
|
тромагнит соединены с миллисекундо- |
||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
мером при помощи разъема. |
|
|
|
|
|
|
Рис 4 |
|
|
||||
Порядок выполнения работы
1. Определить период колебаний рамки:
–установить электромагнит в заданном положении на плите
ификсировать его, затягивая гайку;
60