

metodichka_molekulyarka_i_mekhanika
.pdfма кусочков твердого тела. Если М – масса пикнометра с дистиллированной водой, а М′ – масса с водой и кусочками тела, то величина M + m – M′ представляет собой массу воды, вытесненную из пикнометра этими кусочками. По известной плотности дистиллированной воды ρв объем V кусочков твердого тела опреде-
ляется выражением V = |
M + m − M' |
, а искомая плотность ρТ – |
||
|
|
|||
|
m |
|
ρв |
|
формулой ρT = |
|
ρв. |
||
M + m − M ' |
||||
Порядок выполнения работы
1. Набрать кусочки однородного твердого тела (кусочки проволоки) и поместить на одну из чашек аналитических весов. На другую чашку весов поместить разновесы. Взвесить кусочки твердого тела (определить величину m). Масса кусочков должна быть достаточно большой (вместе с пикнометром, наполненным водой, около 200 г), чтобы разность в знаменателе выражения для ρТ имела наименьшую ошибку.
2.Наполнить пикнометр дистиллированной водой до метки и взвешиванием определить массу М. Уровень воды должен доходить до метки нижним краем мениска. Воду добавлять и отбирать пипеткой. Капельки водысостенокудалять встряхиванием пикнометра.
3.Поместить в пикнометр с водой кусочки твердого тела, ото-
брать водупипеткойдо метки ивзвешиваниемопределитьмассу M′. 4. Вычислить плотность твердого тела, воспользовавшись формулой для ρТ, измеренными средними значениями <m>, <M>, <M′ > и значениями из таблицы для плотности дистилли-
рованной воды при температуре измерений.
t, °C |
ρв, г/см3 |
t, °C |
ρв, г/см3 |
t, °C |
ρв, г/см3 |
15 |
0,99913 |
21 |
0,99802 |
27 |
0,99654 |
16 |
0,99897 |
22 |
0,99780 |
28 |
0,99626 |
17 |
0,99880 |
23 |
0,99757 |
29 |
0,99597 |
18 |
0,99862 |
24 |
0,99732 |
30 |
0,99567 |
19 |
0,99843 |
25 |
0,99707 |
31 |
0,99537 |
20 |
0,99823 |
26 |
0,99681 |
32 |
0,99505 |
21
5. Вывести формулу расчета погрешности косвенных измерений плотности твердого тела ΔρТ и вычислить ее, предварительно найдя погрешности прямых измерений m, M, M′.
Определить тип твердого тела, используя таблицы плотности твердых тел (металлов) [3].
Дополнительное задание
Учесть влияние выталкивающей силы воздуха, действующей согласно закону Архимеда, при взвешивании тела. Оценить величину поправки, обусловленной выталкивающей силой воздуха, к массе пикнометра с водой М, считая, что масса 1 см3 воздуха составляет 0,0012 г.
Контрольные вопросы
1.Какое предельное значение может принимать масса пикнометра с водой и кусочками твердого тела M′ в данной лабораторной работе?
2.Почему масса кусочков твердого тела, плотность которого определяется, должна быть достаточно большой?
3.Как учитывается температура окружающей среды при измерении плотности твердых тел пикнометром?
4.Как учесть влияние выталкивающей силы воздуха, действующей согласно закону Архимеда, при взвешивании тела?
Список рекомендуемой литературы
1.Савельев, И. В. Курс общей физики. В 5 кн. Кн. 1. Механика / И. В. Савельев. – М. : АСТ:Астрель, 2005. – 336 с. –ISBN 5-17-002963-2.
2.Лабораторный практикум по физике / под ред. А. С. Ах-
матова. – М. : Высш. шк., 1980. – 326 с.
3.Физический практикум. Механика и молекулярная физика / под ред. В. И. Ивероновой. – М. : Наука, 1967. – 352 с.
22
Лабораторная работа № 1-3
ИЗУЧЕНИЕДИНАМИКИПОСТУПАТЕЛЬНОГОДВИЖЕНИЯ
Цель работы: изучение законов динамики поступательного равномерного и равноускоренного движения, определение ускорения свободного падения.
Оборудование: измерительная установка (машина Атвуда).
Введение
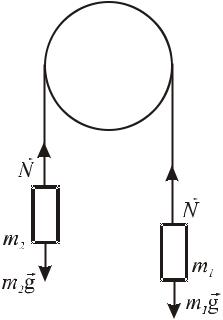
Рассмотрим поступательное движение двух грузов, перекинутых через блок (рис. 1). Нить принимается нерастяжимой; массой нити, моментом инерции блока и трением в оси блока пренебрегаем.
Пусть m1 > m2. Уравнения движения для этого случая выглядят следующим образом:
m1g − N = m1a , |
(1) |
N − m2g = m2a , |
(2) |
где m1 и m2 – массы грузов, N – сила натяжения нити, а – ускорение грузов, g – ускорение свободного падения.
Из (1) и (2) получаем
g = |
a(m1 + m2 ) |
. |
(3) |
||
|
|||||
|
m |
− m |
2 |
|
|
1 |
|
|
|
||
Рис. 1
Описание установки
Экспериментальная установка (машина Атвуда) изображена на рис. 2. На вертикальной колонке 1, закрепленной в основании 2, расположены три кронштейна: неподвижный нижний 4 и два подвижных – средний 5 и верхний 6. Основание оснащено регулируемыми ножками 3, которые позволяют выравнивать положе-
23
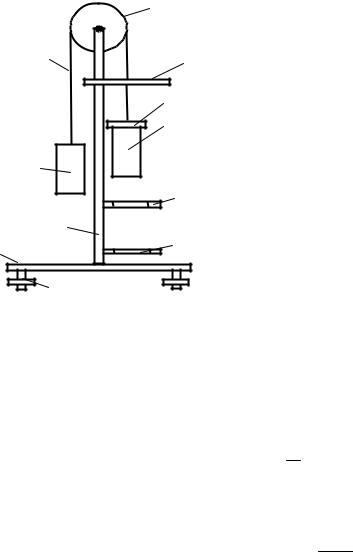
ние прибора. Сверху на колонке закреплен ролик 7 и электромаг- |
|||||
нит (на рис. 2 не показан). Через ролик перекинута нить 8 с при- |
|||||
вязанными на ее концах одинаковыми грузами М. Электромагнит |
|||||
после подведения к нему питающего напряжения при помощи |
|||||
фрикционной муфты удерживает систему ролика с грузами в со- |
|||||
стоянии покоя. |
|
|
|
||
|
Если на одну сторону блока прибавим небольшой груз мас- |
||||
сой m, тогда система грузов получит ускорение и, передвигаясь с |
|||||
этим ускорением, пройдет путь S1. На специальном кольце, за- |
|||||
крепленном на среднем кронштейне, дополнительный груз будет |
|||||
|
7 |
отцеплен, и грузы пройдут уже равномерно |
|||
|
|
путь S2. |
|
|
|
8 |
6 |
На среднем и нижнем кронштейнах |
|||
|
|
имеются фотоэлектрические датчики. При |
|||
|
m |
прохождении грузом положения датчика |
|||
|
М |
образуется электрический импульс, сигна- |
|||
М |
|
лизирующий о начале равномерного дви- |
|||
|
5 |
жения грузов и запускающий секундомер. |
|||
|
После пересечения грузом линии фото- |
||||
|
1 |
||||
|
электрического датчика, |
закрепленного на |
|||
2 |
4 |
||||
|
нижнем |
кронштейне, |
соответствующий |
||
|
|
||||
3 |
Рис. 2 |
электрический импульс |
останавливает се- |
||
кундомер. Таким образом, автоматически |
|||||
|
|||||
ми расстояния S2. |
определяется время прохождения t2 груза- |
||||
|
|
|
|||
|
К концу равноускоренного движения грузы имеют ускоре- |
||||
ние a и скорость v, связанные соотношением v = at1 , отсюда |
|||||
|
|
a = v . |
|
(4) |
|
|
|
t |
|
|
|
|
|
1 |
|
|
|
|
Время t1 можно определить из соотношения |
||||
|
|
S = |
at 2 |
(5) |
|
|
|
1 . |
|||
|
|
1 |
2 |
|
|
|
|
|
|
||
|
Со скоростью v система грузов проходит расстояние S2 со- |
||||
ответственно: |
|
|
|
||
|
|
|
24 |
|
|
v = |
S2 |
. |
(6) |
|
|||
|
t2 |
|
|
Из выражений (4) – (6) несложно получить
|
S |
2 |
|
|
a = |
|
2 |
. |
(7) |
2S t2 |
||||
|
|
1 2 |
|
|
Подставляя (7) в (3), получим результирующее расчетное соотношение для получения ускорения свободного падения:
|
(2M + m)S |
2 |
|
|
g = |
2 |
|
. |
(8) |
2mS t2 |
|
|||
|
|
|
|
|
|
1 2 |
|
|
|
Порядок выполнения работы
1.Проверить, находится ли система грузов М (без перегруза) в состоянии равновесия.
2.Установить верхний и средний кронштейны на заданные преподавателем положения (на кронштейнах имеются указатели положения).
3.Проверить, не задевают ли грузы М при движении кронштейны. Если задевают, то при помощи регулируемых ножек основания привести колонку прибора к вертикальному положению
иотрегулировать положение кронштейнов.
4.Проверить визуально наличие и исправность заземления.
5.Подключить установку к сети питания. Переместить правый грузик в верхнее положение (нижний край груза на уровне риски на кронштейне). Нажать клавишу “СЕТЬ”, при этом при ненажатых клавишах “ПУСК” и “СБРОС” электромагнит с помощью фрикционной муфты должен застопорить ролик 7.
Положить на правый груз дополнительный кольцевой грузик (перегруз). Проверить, находится ли система в состоянии покоя (если система медленно перемещается, то можно слегка нажать на сердечник электромагнита).
6.Нажать на клавишу “ПУСК” (система придет в движение). Записать измеренное значение времени движения грузика на пути
S2. Нажать клавишу “СБРОС”. Поднять груз в первоначальное положение. Нажать клавишу “ПУСК” в “утопленном” положении, чтобы она перешла в нормальное (“неутопленное”) положение; ролик застопорится, и система готова к новым измерениям.
25

7.Повторить измерения с одним перегрузом 4 – 5 раз. Найти среднее значение времени движения <t2>.
8.Найти массу перегруза m на аналитических весах (если он не маркирован). Измерить и записать значения S1 и S2.
9.Рассчитать g по формуле (8).
10.Повторить измерения с другими перегрузами (по указанию преподавателя).
11.Найти среднее значение <g>.
12.Рассчитать погрешность определения g как погрешность косвенных измерений.
g =< g > |
(2 М)2 |
+ ( m)2 |
|
2 S2 |
2 |
|
(2M |
+ m)2 |
+ |
|
|||
|
||||||
|
|
S2 |
||||
|
m 2 |
+ |
|
|
m |
|
S1 |
2 |
|
2 t2 |
2 |
|
+ |
|
+ |
. |
|||
S1 |
t2 |
|||||
|
|
|
|
Дополнительное задание
Определить величину силы трения при измерении ускорения свободного падения на машине Атвуда.
Контрольные вопросы
1.Сформулировать законы Ньютона.
2.Какое движение называется равномерным, равноускоренным? Нарисовать графики зависимостей ускорения, скорости, пути от времени для равномерного и равноускоренного движения.
3.Как влияет на точность измерений величины расстояний S1 и S2? Величина перегруза? Трение в блоке?
4.Почему измеренное ускорение свободного падения меньше, чем 9,8 м/с2.
Список рекомендуемой литературы
1.Савельев, И. В. Курс общей физики. В 5 кн. Кн. 1. Механика / И. В. Савельев. – М.: АСТ:Астрель, 2005. – 336 с. –ISBN 5-17-002963-2.
2.Сивухин, Д. В. Общий курс физики. В 5 т. Т. 1. Механика / Д. В. Сивухин. – М. : Наука, 1979. – 519 с.
3.Каленков, С. Г. Практикум по физике. Механика / С. Г. Каленков, Г. И. Соломахо. – М. : Высш. шк., 1990. – 112 с.
26
Лабораторная работа № 1-4
ОПРЕДЕЛЕНИЕ СКОРОСТИ ПОЛЕТА ТЕЛА
Цель работы: изучение законов вращательного и колебательного движений, закона сохранения и изменения механической энергии, ознакомление с методами определения скорости тел.
В работе используются два метода определения скорости полета тел: метод крутильного баллистического маятника (динамический метод) и метод вращающихся бумажных дисков на установке Поля.
Метод крутильного баллистического маятника Оборудование: крутильный баллистический маятник в двух
модификациях: 1. “Механический” крутильный баллистический маятник, пневматическая винтовка, пули, секундомер, аналитические и технические весы.
2. “Автоматический” крутильный баллистический маятник (с автоматической регистрацией времени колебаний), снарядыцилиндрики, аналитические весы.
Введение
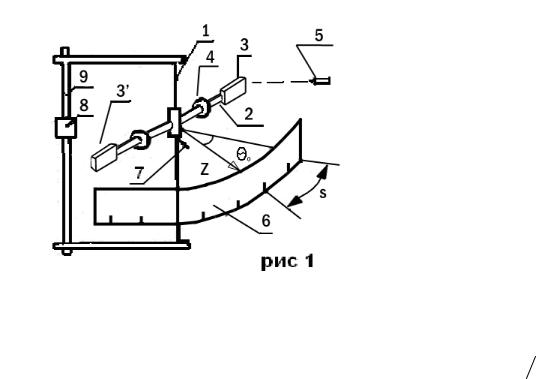
Схема “автоматического” крутильного баллистического маятника приведена на рис. 1. Он представляет собой стальную проволоку 1, зафиксированную вертикально, к середине которой прикреплен маятник, состоящий из двух симметричных относительно проволоки металлических стержней (спиц) 2, на которые присоединено по одной мисочке с пластилином (мишени) 3 и 3' и по одному одинаковому грузу (m1) 4.
При неупругом ударе снаряда 5 в мишень 3 маятника момент импульса снаряда mvr равен моменту импульса маятника с
27
прилипшим снарядом (J + J ′)ω0 по закону сохранения момента
импульса: |
|
|
|
|
||
|
′ |
= mvr , |
|
|
|
|
|
(J + J )ω0 |
|
|
|
||
где m – масса снаряда; v – скорость снаряда; |
r – прицельное рас- |
|||||
|
|
|
стояние – расстояние от оси |
|||
|
|
|
вращения маятника до центра |
|||
|
|
|
вклеивания снаряда |
в |
пла- |
|
|
|
|
стилин; |
J – момент инерции |
||
|
|
|
маятника |
относительно |
оси |
|
|
|
|
вращения; J′ – момент инер- |
|||
|
|
|
ции снаряда относительно той |
|||
|
|
|
же оси; ω0 – начальная угло- |
|||
|
|
|
вая скорость маятника. |
|
|
|
|
|
|
Отсюда получим |
выра- |
||
|
|
|
||||
Рис. 1 |
жение для скорости снаряда |
|||||
|
|
|
(учитывая, что J ′ << J ): |
|
||
|
|
|
v = J ω 0 m r . |
|
(1) |
|
При ударе снаряда в мишень коромысло (маятник) выходит из равновесия; поворачиваясь, закручивает проволоку, на которой подвешен маятник; при этом возникают крутильные колебания вокруг оси вращения. Момент упругой силы M, возникающий в результате закручивания нити, стремится вернуть систему в положение равновесия. По закону Гука M пропорционален углу поворота θ :
M = −Dθ ,
где D – коэффициент пропорциональности, зависящий от упругих свойств проволоки и называемый модулем кручения.
Основной закон динамики вращательного движения маятника
M = −Dθ = Jε, |
(2) |
28 |
|
где ε – угловое ускорение. Учитывая, что угловое ускорение равно второй производной от угла поворота по времени d 2θ  dt2 , формулу (2) можно записать в виде:
dt2 , формулу (2) можно записать в виде:
J |
d 2θ |
+ Dθ = 0. |
(3) |
|
dt2 |
||||
|
|
|
Выражение (3) представляет собой дифференциальное уравнение незатухающих гармонических колебаний. Его решение имеет вид
θ = θ0 cos(2πt T + ϕ0 ) , |
(4) |
где θ0 – амплитуда колебания; ϕ0 – начальная фаза; Т – период колебания. Подставляя (4) в уравнение (3), найдем выражение для периода колебаний:
T = 2π J D . |
(5) |
Угловую сорость ω найдем, дифференцируя (4) по времени: ω = dθ dt = −( 2πθ0
dt = −( 2πθ0  T )sin(2πt
T )sin(2πt T + ϕ0 ) . Из этого выражения следует, что амплитудное значение угловой скорости ω0 связано с
T + ϕ0 ) . Из этого выражения следует, что амплитудное значение угловой скорости ω0 связано с
амплитудным значением угла поворота θ0 |
соотношением |
ω0 = 2πθ0 T . |
(6) |
Момент инерции маятника J можно найти, используя соотношение (5). Для исключения неизвестной величины D в этом выражении проводят измерения периода колебаний маятника при двух значениях его момента инерции.
Для этого определяют период колебания маятника при двух положениях грузов на спицах маятника: T1 – при минимальном расстоянии R1 грузов от оси вращения и Т2 – при максимальном расстоянии R2 грузов от оси вращения. Момент инерции маятника:
в первом случае – |
J1 = |
′ |
, |
(7) |
J0 + J1 |
||||
во втором – J2 = J0 + J2′ , |
|
(7′) |
||
|
|
29 |
|
|

′ |
и |
′ |
– моменты инерции двух подвижных грузов m1 для |
где J1 |
J2 |
R1 и R2 соответственно. Момент инерции грузов m1 можно считать как для точечных масс
′ |
|
|
|
2 |
′ |
|
|
2 |
(8) |
J1 |
= 2m1R1 , |
J2 |
= 2m1R2 . |
||||||
Подставляя (8) в (7) и (7') и вычитая (7) из (7'), |
получим: |
||||||||
|
|
J |
2 |
− J = 2m (R2 |
− R2 ) , |
|
|||
|
|
|
1 |
|
1 |
2 |
1 |
|
|
|
|
|
|
|
или |
|
|
|
|
J |
2 |
= J + 2m (R2 |
− R2 ). |
(9) |
|||||
|
|
|
1 |
1 |
2 |
|
1 |
|
|
Записав выражения (5) для периода колебаний Т1 и T2 для двух значений момента инерции маятника J1 и J2, разделив первое выражение на второе и подставив (9), получим выражение для момента инерции J1:
J = 2m T 2 |
(R2 |
− R2 ) |
(T 2 |
− T 2 ) . |
(10) |
|
1 |
1 1 |
2 |
1 |
2 |
1 |
|
Подставив в (1) выражения (10) и (6) для T1, получим выражение для скорости полета снаряда:
v = 4πm θ T (R2 |
− R2) |
mr(T2 |
−T2 ) . |
(11) |
||
1 0 1 2 |
1 |
|
2 |
|
1 |
|
Амплитудное значение угла поворота |
θ0 |
можно опреде- |
||||
лить, если на оси подвеса прикрепить (см. рис. 1) стрелку 7 (или зеркальце), тогда при ударе снаряда в маятник стрелка (или световой зайчик от зеркальца) отклонится на угол θ0 , который можно отсчитать по круговой шкале 6. Если шкала не круговая, а прямолинейная, как в “механическом” маятнике, учитывая, что угол θ0 обычно достаточно мал, его можно найти, измерив расстояние l от оси подвеса маятника до шкалы и отклонение стрелки S, т.е. θ0 S l . В “автоматическом” маятнике роль стрелки играет риска на мисочке с пластилином, противоположная мисочке, в которую попадает снаряд.
l . В “автоматическом” маятнике роль стрелки играет риска на мисочке с пластилином, противоположная мисочке, в которую попадает снаряд.
30