

ТЭС_часть2
.pdfЗададим в качестве помехи «белый» шум, т.е. спектральная плотность, является постоянной составляющей: G(ω) =ν02 , а корреляционная функция есть δ −функция. Мощность помехи на выходе фильтра равна:
σ 2 = |
ν02 ∞ |
K 2 (ω)dω = 2ν |
02 |
∆f Φ , |
|
2π −∞∫ |
|
|
|
где K (ω)−АЧХ высокочастотного фильтра; |
|
|
||
∆f Φ −эффективная ширина полосы этого фильтра.
Если в качестве фильтра мы будем использовать оптимальный фильтр, то ∆f Φ = T1 .
Отношение мощности сигнала к мощности шума будет равно:
h |
2 |
= |
a2 |
= |
|
P |
= |
P T |
= |
E |
= h |
2 |
, |
|
|
|
C |
C |
|
|
|||||||
|
2σ 2 |
|
2ν02 |
2ν02 |
|
||||||||
|
|
|
|
σ 2 |
|
|
0 |
|
|||||
где E −энергия сигналя, ν02 −спектральная плотность помехи на входе приёмника.
Если использовать квазиоптимальный фильтр с прямоугольной АЧХ:
∆f Φ = 1,37T .
Тогда отношение мощности сигнала к мощности шума будет равно:
h2 = |
PC |
= 0,825 |
PC T |
= 0,825 h2 |
, |
|
2ν02 |
||||
|
σ 2 |
|
0 |
|
при этом не учитываются остаточные колебания («хвосты»).
Расширение полосы пропускания до величины ∆f Φ = T2 , необходимое для ликвидации остаточных колебаний понизят отношение мощности сигнала к мощности шума.
h2 = |
PC |
= 0,5 |
PC T |
= 0,5 h2 |
|||
|
2ν02 |
||||||
|
σ 2 |
|
|
|
0 |
||
|
|
|
|
|
1 e− |
h2 |
|
Вероятность ошибки в этом случае будет равна: P = |
0 |
. |
|||||
2 |
|||||||
|
|
|
|
|
2 |
|
|
Таким образом, если происходит расширение полосы пропускания фильтра, то происходит уменьшение помехоустойчивости, т.е. происходит уменьшение отношения мощности сигнала к мощности помехи.
Уменьшение отношения мощности сигнала к мощности помехи при использовании реальных фильтров с широкой полосой пропускания можно частично скомпенсировать, если фильтр после детектора будет согласован с продетектированным сигналом. Некогерентный способ приёма с использованием детектора огибающей имеет существенный недостаток, который проявляется при малых отношениях мощности сигнала к мощности помехи на входе. Этот недостаток приводит к подавлению слабого сигнала сильной помехой.
Пусть на вход амплитудного детектора поступает смесь из АМ сигнала и помехи: x(t )= a cos(ω0t +ϕ)+ n(t ).
Помеха n(t ) представляет собой узкополосный случайный процесс:
n(t )= nC (t )cosω0t + nS (t )sinω0t =α (t )cos ω0t +ϕ(t ) ,
61

где nC (t ),nS (t )−случайные медленно меняющиеся квадратурные огибающие с нормальным распределением вероятности с нулевым средним и дисперсией σ 2 , т.е. N (0,σ 2 ), т.е. это косиносоидольная и синосуидальная составляющие.
Дисперсия σ 2 на выходе будет точно такой же, как и на входе. Тогда общий сигнал можно представить в виде:
x(t ) = ρ(t )cos ω0t +ϕ(t ) ,
где ρ |
( |
t |
) |
−огибающая смеси сигнала и помехи: ρ |
( |
t |
) |
= |
|
( |
t |
) |
|
C ( |
t |
) |
|
S |
( |
t |
) |
; |
|
|
|
|
a |
|
|
+ n |
2 |
+ n2 |
|
|
|||||||||||
ϕ(t )−фаза смеси сигнала и помехи: ϕ(t )= arctg |
|
nS (t ) |
|
. |
|
|
|
|
|
|
|
|
||||||||||
a(t ) n |
|
(t ) |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
Линейный детектор выделяет из приходящего сигнала огибающую ρ(t ). |
|
|
|
|
||||||||||||||||||
Посмотрим, что будет при различных отношениях мощности сигнала к мощности |
||||||||||||||||||||||
помехи. В качестве сигнала присутствует a(t ), а в качестве помехи nS |
(t ). |
|
|
|
|
|||||||||||||||||
При больших отношениях мощности сигнала к мощности помехи, когда |
a(t ) |
>>1, то |
||||||||||||||||||||
n |
(t ) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
сигнал на выходе детектора примет вид: ρ(t )= a(t )+ nC (t ), т.е. сигнал линейно связан с огибающей полезного сигнала.
При малых отношениях мощности сигнала к мощности помехи, когда a((t )) <<1, то nS t
сигнал на выходе детектора примет вид:
ρ(t )= 2a(t ) nC (t )+ nS2 (t ) |
α (t ) |
1 |
+ 2 |
a(t ) nC (t ) |
, т.е. сигнал определяется в основном |
|
αS2 (t ) |
||||||
|
|
|
|
|
помехой.
При малых отношениях мощности сигнала к мощности помехи распределение вероятности огибающей смеси сигнал и помехи мало отличается от распределения огибающей только одной помехи. Сигнал проявляется слабо и подвержен подавлению помехой. Чтобы устранить это влияние отношение мощности сигнала к мощности
помехи, должно быть: h2 ≥ 5. Указанный недостаток устраняется при использовании когерентного метода приёма.
62

73. Когерентный прием при амплитудной телеграфии.
Когерентный приём даёт эффективный результат при малых отношениях мощности сигнала к мощности помехи, когда сигнал проявляется слабо и подвержен подавлению помехой.
При когерентном приёме вместо обычного амплитудного детектора используется синхронный детектор с фильтром нижних частот. Синхронный детектор представляет собой перемножитель с гетеродином. Гетеродин представляет собой опорный генератор, который вырабатывает сигнал b cos(ω0t +ϕ0 ). На вход поступает смесь сигнала и
помехи. Сигнал на перемножитель поступает после фильтрации и колебание от местного опорного генератора, его сигнал совпадает по фазе с входным сигналом.
Представим случайный процесс в виде узкополосного сигнала:
n(t ) = nC (t )cos[ω0t +ϕ0 ]+ nS (t )sin[ω0t +ϕ0 ].
где nC (t ),nS (t )−случайные медленно меняющиеся квадратурные огибающие с нормальным распределением вероятности с нулевым средним и дисперсией σ 2 , т.е. N (0,σ 2 ), т.е. это косиносоидольная и синосуидальная составляющие.
При передаче единицы после перемножителя и низкочастотной фильтрации мы имеем: y(t )= 12 ba(t )+ 12 bnC (t ), т.е. синхронный детектор по отношению к полезному сигналу
является линейным детектором и обладает некоторой фазовой избирательностью, а помеха на его выходе имеет нормальное распределение вероятности.
Анализ данного способа показывает, что оптимальный пороговый уровень будет: x0 = a2 ,
где a −амплитуда входного сигнала, b −амплитуда сигнала местного опорного генератора.
Вероятность ошибки равна:
P = 1 |
1−Φ |
|
PC |
|
= |
1 |
1−Φ |
|
h |
. |
|
|
|
|
|
|
|
||||||
2 |
|
σ |
2 |
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
Построим график вероятности в зависимости от отношения мощности сигнала к мощности шума:
63
Величина σ 2 определяется характеристиками последетекторного фильтра, т.е. фильтром нижних частот. Если использовать согласованный фильтр или интегратор, то отношение мощности сигнала к мощности шума будет увеличиваться и даже будет максимальным: h02 = MAX .
Приведённая кривая показывает, что синхронный детектор обеспечивает выигрыш по мощности на 15 – 20% по сравнению с линейным детектором. В синхронном детекторе не происходит подавление слабого сигнала помехой. Однако при когерентном способе приёма значительно усложняется аппаратура, поэтому для приёма амплитудноманипулированного сигнала он не получил практического применения.
При любом способе приёма сигнала АТ неоптимальная установка порога приводит к значительному увеличению вероятности ошибки. В реальных условиях амплитуда сигнала не остаётся постоянной, поэтому требуется автоматическое регулирование порога. По этой причине амплитудная манипуляция на магистральных линиях связи почти не применяется, но она применяется в радиосвязи.
64

74. Частотная телеграфия.
При частотной телеграфии мы пользуемся частотно-манипулированным (ЧМ) сигналом. За "0" принимается сигнал: s1 (t ) = a cos(ω1t +ϕ1 );
За "1" принимается сигнал: s2 (t ) = a cos(ω2t +ϕ2 ). ϕ1,ϕ2 −начальные фазы.
Рассмотрим некогерентный способ приёма.
Модель помехи: аддитивная помеха, «белый» шум, т.е. G(ω) =ν02 . Существует два способа дискретного приёма ЧМ колебаний:
1)приём по мгновенным значениям частоты;
2)приём по мгновенным значениям огибающей. Суть первого метода:
Этот метод содержит ограничитель амплитуды и частотный детектор. Амплитуда колебаний на выходе детектора пропорциональна мгновенной частоте смеси сигнала и помехи. Помехоустойчивость данного способа уступает второму способу приёма. Рассмотрим приём по мгновенным значениям огибающей.
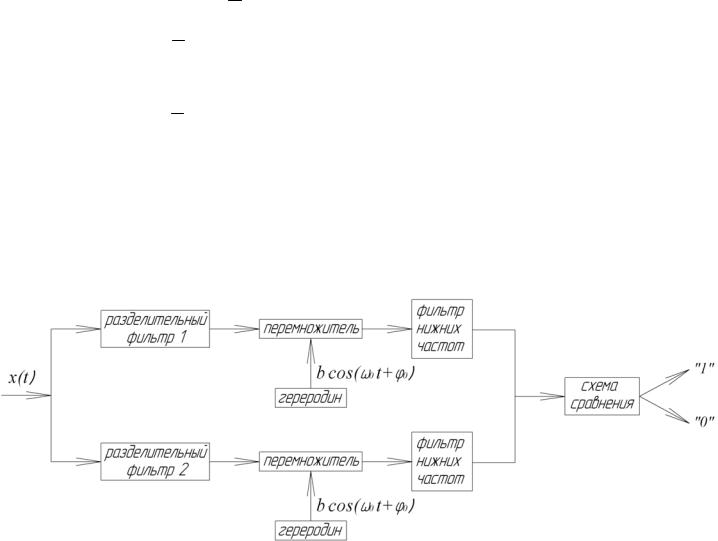
Блок – схема:
Решающее устройство в момент замыкания ключа, т.е. в середине посылки принимает решение о переданном сигнале либо "0", либо "1".
Предполагается, что характеристики фильтров таковы, что через каждый из них один из сигналов проходит без искажений, а второй полностью повторяется. В этом случае шумы на выходе фильтра можно считать некоррелированными. В вычитающем устройстве из огибающей сигнала с первого фильтра вычитается сигнал со второго фильтра. Тогда решающее устройство будет выносить решение в пользу сигнала s1 (t ), если разность
будет положительна и s2 (t ), если разность будет отрицательна. Следовательно,
65

регистрируется тот сигнал, для которого значение огибающей на выходе соответствующего фильтра оказывается больше.
Предположим, что передаётся сигнал s1 (t ). В этом случае на выходе первого фильтра у нас будет сигнал с обобщённой рэлейевской характеристикой:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
x2 −a2 |
|
|
|
|
|
|
ax1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
На выходе первого фильтра: |
ω |
(x ) |
= |
|
|
e− |
1 |
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
2σ 2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
σ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
На выходе второго фильтра: ω1 (x2 ) |
= |
|
|
e |
− |
|
1 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
2 |
|
|
2σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
σ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При передаче сигнала s1 (t ) ошибка будет в том случае, если x2 > x1 : |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
|
x |
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
P(x2 > x1 = const)= x∫ |
|
|
e |
− |
2 |
|
|
dx2 = e |
− |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
2σ |
|
|
2σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
σ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку x1 −случайная величина, поэтому для определения вероятности ошибки, |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
полученное выражение необходимо усреднить по всем возможным значениям x1 : |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
∞ |
|
|
|
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∞ |
x |
|
|
|
|
|
x |
2 |
+a2 |
|
ax |
|
x2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
∫ |
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
|
|
|
− |
|
1 |
|
|
|
|
− |
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
P = |
ω |
(x ) |
ω |
(x |
|
)dx |
|
dx |
|
= |
|
σ |
|
|
|
e 2σ I |
|
|
σ |
|
|
|
|
|
e 2σ |
dx . |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
1 |
1 |
x |
|
1 |
|
2 |
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подынтегральное выражение можно легко вычислить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
Если e |
− |
a2 |
вынести за интеграл, то обозначим b = |
|
|
|
a |
|
, |
|
y = |
|
2 x . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
4σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
|
− |
a2 |
∞ |
|
y |
|
|
− |
b2 |
+y2 |
|
|
|
|
|
by |
|
|
|
|
|
|
1 |
|
−h |
2 |
|
|
|
2 |
|
a2 |
|
|
P P |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Окончательно получим: |
P = |
|
|
e |
|
4σ |
|
|
|
|
|
e |
|
|
2σ |
|
|
|
I0 |
|
|
|
2 |
|
|
dy = |
|
|
e |
|
|
2 |
, где |
h |
|
= |
|
|
= |
C |
= |
C |
. |
|||||||||||||||||||||
|
|
|
|
∫0 σ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2σ |
|
σ |
|
PΠ |
||||||||||
Проинтегрированное выражение представляет собой плотность вероятности для обобщённого закона Рэлея. Если взять интеграл по бесконечным пределам, то получим величину равную "1", что удовлетворяет условию нормировки плотности вероятности. Аналогичное выражение можно получить для сигнала s2 (t ).
Отношение мощности сигнала к мощности помехи будет зависеть от характеристик разделительных фильтров.
Если сигналы S 1 и S 2 ортогональны, а значение f2 − f1 = kF , где F −частота модуляции, а сами частоты f1 и f2 стабильны, то в качестве разделительных фильтров можно использовать согласованные фильтры, эффективная полоса пропускания которых равна
∆f Φ |
= |
1 |
|
. В этом случае отношение мощности сигнала к мощности помехи будет равно: |
||||||
T |
|
|||||||||
|
|
|
|
|
|
|
|
|
||
h2 = |
|
PC |
|
= |
PC T |
= h2 |
, где h2 |
− отношение мощности сигнала к мощности помехи при |
||
|
|
2ν02 |
||||||||
|
σ 2 |
|
|
O |
O |
|
||||
оптимальной фильтрации.
1 −h02
Вероятность ошибки будет равна: P = 2 e 2 .
При использовании додетекторного интегрирования, с помощью коммутируемых контуров с высокой добротностью, будут обеспечивать такие же результаты.
66
Если в качестве разделительных фильтров использовать фильтра в прямоугольной АЧХ и полой пропускания ∆f Φ = T2 , то отношение мощности сигнала к мощности помехи
1 −h02
будет равно: h2 = 2 e 4 , т.е. уменьшается в два раза по сравнению с оптимальной фильтрации, а вероятность ошибки также ухудшиться , т.е. вероятность ошибки
1 −h02
увеличиться: P = 2 e 4 .
При нестабильности частот полосу пропускания фильтра приходиться ещё более увеличивать. Однако в этом случае, как и при амплитудной манипуляции, недостаточную фильтрацию до детектора можно возместить, если использовать последетекторную фильтрацию.
Чтобы получить большую помехоустойчивость при частотной телеграфии, если обеспечить когерентный приём. Когерентный приём можно организовать, если вместо линейных детекторов использовать синхронные детекторы:
Вероятность ошибки, при когерентном приёме определяется выражением:
P = 12 1−Φ(h0 ) .
Сравнивая формулы вероятности ошибки при АМ и ЧМ можно сделать вывод, что ЧМ более помехоустойчива, чем АМ и обеспечивает по сравнению с ней выигрыш по помехоустойчивости в два раза.
67

75. Фазовая телеграфия.
За "0" принимается сигнал S1 (t ) = a cos(ω0t +ϕC )
За "1" принимается сигнал S2 (t ) = a cos(ω0t +ϕC +π ).
Так как мы работаем с фазой, то приём сигналов фазовой телеграфии осуществляется только синхронным когерентным детектором.
Приёмное устройство в этом случае должно обязательно содержать местный гетеродин, который генерирует опорное колебание, совпадающее по фазе с одним из сигналов. Напряжение на выходе фильтра нижних частот при отсутствии помехи:
|
ab |
|
|
1 ab, ϕC −ϕΓ =0 |
|||
y(t )= |
cos(ϕC |
|
2 |
|
|
, где |
|
2 |
−ϕΓ )= |
1 |
|
||||
|
|
|
|
ab, ϕC |
−ϕΓ =π |
||
|
|
|
− |
2 |
|||
|
|
|
|
|
|
|
|
b −напряжение опорного генератора, ϕΓ −значение фазы генератора. Определим вероятность ошибки приёма при наличии помехи. Допустим, что при
передаче S1 (t ), ошибка возникает в том случае, если полярность напряжения на выхода
фильтра нижних частот будет отрицательной.
Процесс образования ошибки можно показать на векторной диаграмме:
Если посмотреть на диаграмму, то можно сказать, что знак напряжения на выходе
JJJG
фильтра будет положительным, если конец суммарного вектора x(t ): сигнала и помехи
будет находиться в верхней полуплоскости, и будет отрицательные, если будет находиться в нижней полуплоскости.
68

Следовательно, при передаче S1 (t ) ошибка произойдёт в том случае, если конец
суммарного вектора окажется в нижней полуплоскости.
Это произойдёт в том случае, когда одновременно будут выполнены два условия:
а) фаза помехи n(t ) будет находиться в интервале π2 ≤θ ≤ 32π ;
a
б) амплитуда помехи будет больше, чем величина cos(π −θ ).
Амплитуду и фазу помехи можно считать независимыми случайными величинами. Если помеха нормальная, то распределение амплитуды будет рэлейевским, а распределение фазы будет равномерным на интервале (0,2π ).
Поэтому вероятность ошибочного приёма будет равна:
3π |
∞∫ |
|
|
|
P = ∫2 |
ω(un ,θ )dundθ = |
1 |
||
2π |
||||
π |
a |
|
2 cos(π −θ )
3π
∫2 dθ
π
2
∞ |
u |
|
|
|
1 |
|
|
|
P |
|
∫ |
n |
dun |
|
|
||||||
|
= |
|
1 |
−Φ |
2 |
C |
. |
|||
σ |
2 |
2 |
2 |
|||||||
a |
|
|
|
|
|
|
σ |
|
cos(π −θ )
Мы получили, что вероятность ошибки зависит от отношения мощности сигнала к
мощности помехи, а величина σ 2 будет определяться АЧХ фильтра нижних частот. Если в качестве фильтра нижних частот использовать согласованный фильтр, то отношение мощности сигнала к мощности помехи будет максимальным, т.е.:
h2 = |
PC |
= h2 |
, где h2 |
− отношение мощности сигнала к мощности помехи при |
||
σ 2 |
||||||
|
0 |
0 |
оптимальной фильтрации. |
|||
|
|
|
|
|||
Вероятность ошибки в этом случае улучшиться: |
|
|||||
|
|
|
|
P = 1 1−Φ( |
2 h0 ) . |
|
|
|
|
|
2 |
|
|
Если сравнить вероятность ошибки с вероятностью ошибки при ЧМ, то можно сказать, что фазовая телеграфия обеспечивает наибольшую помехоустойчивость. Энергетический выигрыш при использовании фазовой телеграфии составит 6 дБ, т.е. в четыре раза по сравнению в амплитудной телеграфией, и 3дБ, т.е. в два раза по сравнению с частотной телеграфией. Поэтому фазовая телеграфия нашла большее практическое применение, например в сотовой связи.
Для формирования опорного местного колебания при ФМ необязательно иметь местный генератор (гетеродин), его можно непосредственно из приходящего сигнала, если в сигнале устранить скачки фазы. Для этой цели существует несколько схем, но наиболее распространённая схема – схема Пистелькорса. Схема состоит из последовательно соединенного умножителя и делителя частоты пополам. Нетрудно убедить, что при умножении частоты на ''2" устраняется скачок фазы на 180°.
Важным преимуществом ФМ является возможность передачи на одной несущей двух независимых сообщений без дополнительного расширения полосы частот, что используется в современных модемах. Это достигается в системе двухкратной фазовой телеграфии (ДФТ). В этой системе несущее колебание имеет одинаковую частоту, но отличается по фазе на 90°. Если в первом канале при манипуляции фаза может принимать значения (0°÷180°), то во втором канале (90°÷270°).
69

Таким образом, в каждой комбинации телеграфной посылки в двух каналах соответственно будет определена фаза передаваемого сигнала. В этом случае приём ДФТ осуществляется с помощью двух фазовых синхронных детектора, на которые подаются опорные колебания, сдвинутые на 90°. Вероятность ошибки при ДФТ будет равна:
P = 12 1−Φ(h0 ) .
По сравнению с ФТ мы имеет проигрыш в два раза по помехоустойчивости , несмотря на явные преимущества эффективности использования полосы частот.
Трудность Система с фазовой телеграфией имеет один серьезный недостаток – склонность к
обратной работе и требует в этой связи регулировок перед началом работы и после перерыва связи.
Явление обратной работы заключается в том, что на выходе фазового детектора меняется полярность посылок, работа происходит в негативе. Причина вызвана случайными скачками фазы на 180° из-за того, что все дискретные генераторы, делители частоты и другие цифровые элементы имеют два устойчивых состояния, т.е. могут выдавать колебания с фазой 0° или 180°, такие скачки фазы принципиально не устранимы.
70