

ТЭС_часть2
.pdf45. Оптимизация систем передачи информации «в целом».
Автором этого направления является К. Шеннон. Он поставил эту проблему и частично решил её. Шеннон считает, что основная задача системы передачи информации состоит в надёжной безошибочной передачи информации с максимально возможной скоростью.
Шеннон доказал ряд теорем, утверждений и показал существование оптимальных систем «в целом». Шеннон предложил структуру, оценил качество работы оптимальной системы, однако вопрос о структуре остался открытым. Т.е. он указал общие пути решения, суть которых сводиться к отысканию наилучших методов преобразования сообщения в сигнал на передающей стороне и преобразование смеси сигнала и помехи на приёмной стороне. Таким образом, по Шеннону, оптимальная система передачи информации такая система, в которой применены “наилучшие” методы кодирования и декодирования, обеспечивающие максимальную скорость передачи по каналу. Если взять простейшую телекоммуникационную схему, то речь идёт о сечении “источник – получатель”, “кодер – декодер”. Шеннон считал, что шум, который действует в канале – это нормальный гауссовский шум, характеристики системы связи идеальны, т.е. отсутствуют искажения. Однако даже в таком виде не удалось конкретизировать суть оптимальной процедуры кодирования – декодирования и найти способы их реализации. Поэтому для решения задачи синтеза оптимальной системы передачи ведутся дальнейшие упрощения, т.е. используют принцип декомпозиции (разбиения) системы на отдельные части подсистемы. И в соответствии с этим принципом можно оптимизировать только ту часть, которая заключается в ограниченном рассмотрении (кодек, модем).
При оптимизации “кодер – декодер” ( A − A′) известен наилучший метод кодирования с максимальной скоростью. При оптимизации “модулятор – демодулятор” ( B − B′) или оптимизация типа “сигнал – фильтр” сигнал на исходной стороне идёт на оптимальный для него фильтр на приёмной стороне.
Возможно и другая упрощённая постановка задачи оптимизации, также по Шеннону: Часть системы (например, модем) считают чёрным ящиком, которой характеризуется стохастической матрицей трансформации входного множества символов {xki} в
выходное множество символов {xmki} под действием помех.
11

Такая матрица определяет все возможные вероятности переходов входного множества в выходное множество, т.е. элементами матрицы являются переходные вероятности.

 Pij
Pij 
 Переходные вероятности – вероятности, которые характеризуют возможность перехода под действием помех i–го входного символа в j–ый. Значения элементов матрицы
Переходные вероятности – вероятности, которые характеризуют возможность перехода под действием помех i–го входного символа в j–ый. Значения элементов матрицы 
 Pij
Pij 
 определяется энергией, статистическими свойствами сигнала, уровнем
определяется энергией, статистическими свойствами сигнала, уровнем
помех, вводом модуляции и т.д., т.е. всеми операциями и факторами, которые могут находиться между этими сечениями. Задавая матрицу переходных вероятностей можно формализовать задачу и уйти от конкретных свойств. Такая формализация использовалась Шенноном, она удобна, описывает в общем виде статистические особенности системы, поэтому в этих переходных вероятностях мы как-то косвенно учитываем все, что нам попадается (помехи, виды неидеальности и т.д.). Это описание для оптимизации подсистемы “кодер – декодер” (кодек), “модулятор – демодулятор” (модем) позволило оптимизировать каждую из этих частей. Даже при такой постановке не удалось решить задачу оптимизации всей системы связи «в целом», т.к. при оптимизации каждого из этих элементов и строительстве оптимальной системы передачи информации начинают появляться новые свойства и проблемы.
12
46. Оптимизация приемной части систем связи.
Для этого направления характерно допущение, связанное с тем, что вся совокупность операций связанных по формированию сигналов в передающей части системы и параметры сигнала-переносчика заданы и точно известны в приёмной части. Тогда задача оптимизации сводится к такому способу приёма, который был бы оптимальным для заданного способа формирования сигналов и конкретных условий в пункте (точке) приёма. Мы должны наложить ряд ограничений: по полосе пропускания ( ∆f ), по
мощности помех ( PΠ ), по средней мощности сигнала ( PCP ) и возможно по другим
ограничением, которые возникают в условиях передачи (например, вид канала). Такое направление оптимизации получило название теории оптимальных методов приёма сигналов. Эту теорию предложил В. Котельников в 1949 году. При формировании приёмника большое внимание уделяется априорным сведениям и допущениям. Чем более полны и достоверны эти априорные сведения (о помехах и среде распространения), тем успешнее будет решена задача оптимального приёма. Например, на сегодняшний день наиболее полно разработаны вопросы оптимально приёма в каналах с аддитивным гауссовским шумом, т.е. если мы задаём модель шума гауссовской с аддитивным воздействием. С такой помехой можно корректно решить задачу оптимального приёма. Легко решается задача с сигналами в точно известными в месте приёма, т.е не со случайными сигналами, а с детерминированными (импульсы, синусоиды, модулированные сигналы и т.д.) Тем не менее, полученные результаты обычно не позволяют ответить на многие принципиально важные вопросы оптимального приёма. Подход Котельникова ближе к реальным методам и порой может где-то уходить от оптимальных методов решения, но он может предложить вопросы приближения реальных систем к оптимальным или квазиоптимальным методам. Таким образом, теория оптимальных методов приёма это эффективное средство при проектировании и разработки новых систем передачи информации, позволяющая разобраться в том в какой из возможных систем, и в каком случае необходимо отдать предпочтение.
Можно ли повысить качественные показатели системы, совершенствуя только способ приёма?
Каковы методы реализации приёма близкого к оптимальному приёму?
Эта теория указывает направление поиска решения задачи и позволяет определить предельные показатели качества работы систем, но не даёт готовых решений реализации.
13

47. Преобразование сигналов в системах передачи информации.
Основным видом операций в системах передачи информации является модуляция и демодуляция. Необходимость модуляции вызвана организацией переносчика сообщений. В качестве переносчика используют материальные объекты, которые имеют свойство распространяться в пространстве (например, электромагнитное поле, кабели, световой луч, акустические колебания и т.п.).
Рассмотрим частотный план, который используется в телекоммуникациях:
1 – проводное вещание;
2 – радиосвязь;
3 – РРЛС;
4 – оптическая связь;
5 – кабельная связь;
6 – спутниковая связь;
7 – сотовая радиосвязь;
8 – первичные сигналы;
9 – телевизионный; Ставиться задача, как передать по такому широкому частотному спектру.
Например, как передать телефонный сигнал по оптической связи. Очевидно, что надо перенести сигнал из одной частотной области в другую. Модуляция позволяет организовать такой перенос. Таким образом, чтобы передать первичный сигнал s(t )
необходимо преобразовать сигнал v(t ) удобный для его передачи по соответствующей
среде распространения, а в пункте приёма нужно вернуться обратно на частотную позицию, т.е. в пункте приёма выполняется обратное преобразование, которое называется демодуляцией. Обычно в качестве переносчиков используют гармонические высокочастотные колебания, согласованные по частоте с тем местом, куда переносится сигнал и это колебание называется несущим колебанием. Тогда процесс преобразования первичного сигнала заключается в изменении одного или нескольких параметров несущего колебания по закону изменения первичного сигнала и это операция называется модуляцией. Мы берём какое-либо гармоническое колебание, которое будет играть роль несущей: v0 (t )=V cos(ωt +ϕ), где V – амплитуда, ω – частота, ϕ – фаза.
Меняя один из этих параметров по закону передаваемого сигнала, мы можем получить соответствующий вид модуляции: амплитудную, частотную или фазовую.
В системах передачи информации различают следующие виды модуляции: непрерывная и импульсная.
14
48. Амплитудная модуляция.
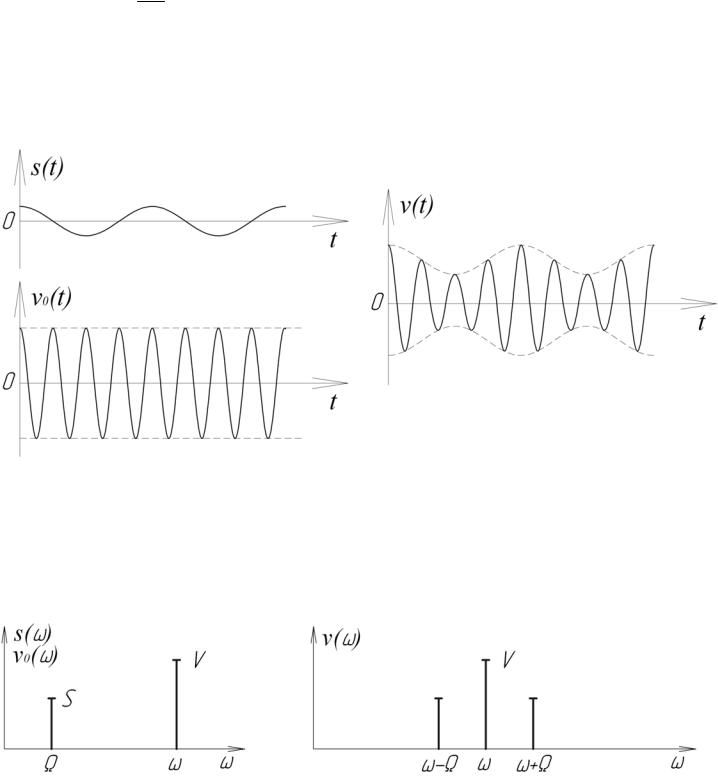
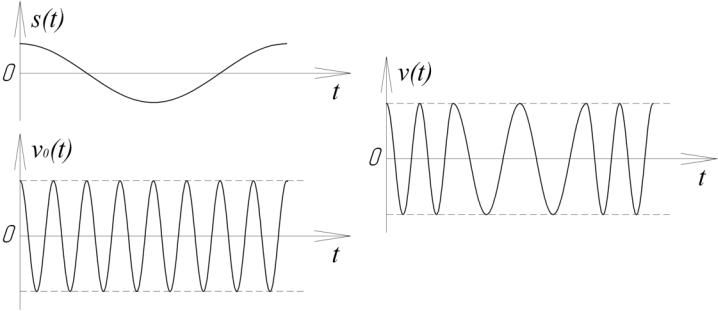
Несущее колебание промоделировано по закону первичного сигнала амплитудой, т.е. амплитуда несущей меняется пропорционально первичному информационному сигналу. Сигнал v(t ) =V (t )cos(ωt +ϕ), причём амплитуда V (t ) меняется во времени по закону
полезного информационного сигнала. Если в качестве первичного информационного сигнала используем s(t ) = S cosΩt , где S – амплитуда полезного сигнала, Ω – частота,
причём Ω <ω, то модулированное колебание при фазе равной нулю (ϕ = 0 ) запишется в следующем виде: v(t )= (V + kAM S cosΩt )cosωt ( ). Параметр ∆V = kAM S и введём
параметр M AM = ∆VV , который называется глубиной (коэффициентом) модуляции.
Таким образом: v(t )=V (1+ M AM cosΩt )cosωt .
Параметр ∆V показывает изменение амплитуды колебания модулированного сигнала. Если M AM = 0, то модуляции нет, и тогда v(t )= v0 (t ).
Обычно амплитуду несущей берут выше, чем амплитуду полезного сигнала (V > S ) и тогда на коэффициент модуляции накладывается ограничение 0 < M AM <1.
Преобразуем ( ): v(t )=V cosω + M AM2 V cos(ω + Ω)t + M AM2 V cos(ω −Ω)t .
Амплитудно-модулированное (АМ) колебание состоит из трёх гармонических составляющих с частотой:ω, (ω + Ω), (ω −Ω). Амплитуда с частотой ω имеет частоту
несущей, а амплитуда уменьшается пропорционально половине коэффициента модуляции.
Таким образом, спектр АМ колебания состоит из частоты несущего и двух боковых.
15

Если спектр сигнала сложный, т.е. состоящий из нескольких гармоник (например, телефонный сигнал), то:
Анализ энергетических соотношений показывает, что основная мощность АМ колебания заключена в несущем колебании, которое не содержим полезной составляющей. Нижняя в верхняя боковые полосы несут в себе одинаковую информацию и имеют более низкую мощность. Для большинства непрерывных сообщений мощность боковых полос составляет 10 – 20 % от несущей. С информационной точки зрения при АМ мощность передатчика используется неэффективно. Очевидно, можно сделать, как, чтобы подавить эту нусущую и сохранить только те составляющие, которые имеют полезную составляющую АМ с подавленной несущей (АМ–ПН).
Ещё более эффективная модуляция – это однополосная АМ с подавленной несущий (ОАМ–ПН или ОБП).
Вслучае ОБП спектр АМ колебания полностью совпадает со спектром полезного сигнала, что позволяет более эффективно использовать частотный ресурс:
Вслучае ОБП спектр АМ колебания полностью совпадает со спектром полезного
сигнала, но перенесённую по частоте в высокочастотную часть системы.
Полоса частот ОБП колебания равна верхней частоте передаваемого сигнала: ∆foδπ = FB .
Способы формирования ОБП колебания: Существует два способа формирования:
1)фильтрационный (спектральный);
2)фазовый (корреляционный).
16

Структура фильтрационного метода:
Предъявляется особенность к фильтру, который требует большую крутизну (добротность) АЧХ фильтра.
Структура фазового метода:
Трудности реализации системы приводят к тому, что они могут только применяться для передачи сообщений, не содержащих очень низкочастотный сигнал (например, телеметрия до 10 Гц ).
Применение ОБП нашло в многоканальной связи при частотном уплотнении.
17
49. Частотная и фазовая модуляция.
При частотной модуляции изменяется во времени пропорционально первичному сигналу s(t ) частота несущего колебания.
ω(t ) =ω + kϒM s(t ) =ω + ∆ωcosΩt , где kϒM – коэффициент пропорциональности ЧМ, ∆ω = kϒM S – девиация частоты, т.е. максимальное отклонение частоты модулируемого сигнала от частоты несущей.
Получим аналитические выражения для фазовой модуляции. При изменении фазы несущего колебания получим фазовую модуляцию:
ϕ(t ) =ϕ + kΦM s(t ) =ϕ + ∆ϕcosΩt , где kΦM – коэффициент пропорциональности ФМ, ∆ϕ = kΦM S – девиация фазы.
Между частой и фазой существует тесная связь. Представим несущее колебание в следующем виде:
v0 (t ) =V cos(ωt +ϕ) =V cosψ (t ), где ϕ – начальная фаза, ψ (t ) – полная фаза.
Фазу можно получить интегрированием частоты: |
|
|
|
ψ (t )= T∫ω(t )dt +ϕ . В это выражение подставим значение ω(t ): ψ (t )=ωt + |
∆ω sin Ωt . |
||
0 |
|
Ω |
|
∆ω |
|
||
Введём понятие коэффициента (индекса) частотной модуляции: MϒM = |
. |
||
|
|||
Ω |
|||
При ЧМ общее выражение будет записано в следующем виде: v(t )=V cos(ωt + MϒM sin Ωt +ϕ).
При ФМ общее выражение будет записано в следующем виде: v(t )=V cos(ωt + MΦM cosΩt +ϕ).
По внешнему виду сигналы ФМ и ЧМ достаточно сложно, поэтому ФМ и ФМ объединяют в один вид модуляции, который называется угловой модуляцией (УМ). Вводят индекс угловой модуляции M без дополнительной индексации.
18

Если выводить спектр УМ сигнала, то мы получим несущее колебание, которое можно представить в виде суммы гармонических колебаний:
v(t ) =V {J0 (M )cosωt + J1 (M )cos(ω + Ω)t − J1 (M )cos(ω −Ω)t + J2 (M )cos(ω + 2Ω)t −
−J2 (M )cos(ω − 2Ω)t + J3 (M )cos(ω + 3Ω)t − J3 (M )cos(ω −3Ω)t +...},
где M – индекс угловой модуляции. У нас появляются гармоники, являющимися продуктами взаимодействия несущей и полезного сигнала. Амплитуды этих гармоник определяются функциями Бесселя разного порядка Jk (M ). Чем выше значение индекса
модуляции M , тем шире спектр модулированного колебания. Спектр модулированного колебания при угловой модуляции:
Если полезный сигнал s(t ) отличается от синусоидального сигнала и занимает какую-то полосу (Ωmin ÷Ωmax ), то спектр ещё более усложняется.
19

50. Способы формирования сигналов с угловой модуляцией.
Различают два способа формирования сигнала с угловой модуляцией:
1)модуляция на промежуточной частоте с последующим преобразованием мгновенной частоты полученного модулированного колебания;
2)модуляция на рабочей частоте.
Модуляция на промежуточной частоте широко используется в ЧМ радиовещании, в радиорелейной и космической связи. А модуляции на рабочей частоте используется обычно в служебной ведомственной связи с малой мощностью.
Кроме прямых методов получения получаются косвенные методы:
ЧМ сигнал формируется с помощью фазового модулятора на входе, которого включают интегрирующее звено:
fΠP – промежуточная частота.
Рассмотрим получение фазомодулированного (ФМ) колебания. Существует три способа получения фазомодулированного колебания:
1) пропускание гармонического колебания через контур с изменяющейся фазовой характеристикой.
Изменение фазовой характеристики происходит за счёт управляемого сопротивления, т.е. за счёт реактивного сопротивления контура. Реализуется такая схема при помощи варикапа (  ).
).
Варикап представляет собой активную ёмкость с сопротивлением:
XC = 1 . При воздействии на варикап каким-нибудь напряжением у него изменяется
ωC
емкость, следовательно, изменяется и XC , и значит, меняется частота ω = |
1 |
. |
|
XCC |
|||
|
|
Таким образом, мы можем вводить изменение частоты или фазы в усилительном каскаде.
2) использование фазовращательных цепей с переменным сдвигом фазы; Является разновидностью первого способа, поэтому особого внимания к подробному рассмотрению данного способа мы не привлекаем.
20