

1.27. Пропорциональный и пропорционально-дифференциальный законы регулирования: уравнения, характеристики, основные свойства.
Пропорциональным называют линейный закон регулирования, отражающий прямо пропорциональную зависимость между изменением управляющего воздействия и погрешностью регулирования:
где Кр — коэффициент усиления, являющийся параметром настройки пропорционального регулятора.
Статические характеристики П-регулятора при различных коэффициентах усиления Кр:
Избавиться от недостатка, присущего пропорциональному закону регулирования — статической погрешности — принципиально невозможно. Можно, однако, уменьшить статическую ошибку регулирования, увеличивая Кр.
Передаточная функция пропорционального регулятора:
Передаточная функция пропорционального управляющего устройства соответствует передаточной функции статического звена нулевого порядка и, следовательно, в динамическом отношении П-регулятор является статическим звеном нулевого порядка.
Переходная характеристика П-регулятора:
Переходные характеристики П-регулятора при различных коэффициентах усиления
При изменении регулируемого параметра П-регулятор мгновенно формирует управляющее воздействие, т. е. является безынерционным.
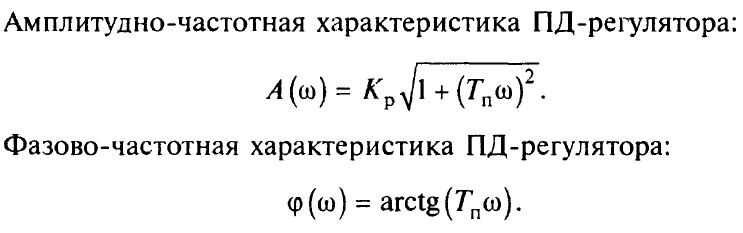
Частотная передаточная функция пропорционального регулятора:
Амплитудная и фазовая частотные характеристики П-регулятора равны:
Если на вход П-регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний.
Качество регулирования в ряде случаев можно повысить, вводя в закон регулирования составляющую, пропорциональную первой производной (скорости изменения) входной величины регулятора, т. е. Д-составляющую.
ПД-закон регулирования определяется функциональной зависимостью:
 ,
,
которой соответствует передаточная функция
![]()

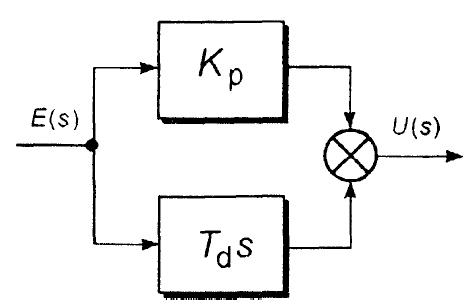
Структурная схема ПД-регулятора
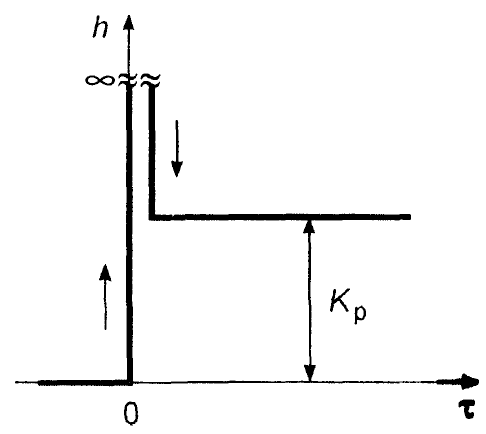
Переходная функция ПД-регулятора:

Переходная характеристика ПД-регулятора отличается от переходной характеристики П-регулятора большим изменением управляющего воздействия ∆u сразу же после изменения ε(τ), что способствует снижению максимальной ошибки регулирования.
Наличие в ПД-регуляторе дифференциальной составляющей в значительной степени повышает эффективность его действия.
ПД-регулятор улучшает качество регулирования, уменьшая фазовое запаздывание САУ в целом на + π/2 рад, как бы снижая порядок объекта на единицу.
Предпочтительно, чтобы ПД-регулятор имел большие значения Кр, поскольку это приводит к уменьшению остаточного отклонения и увеличивает быстродействие системы управления.
1.28. Интегральный закон регулирования: уравнение, характеристики, основные свойства.
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки регулирования:
 ,
где
,
где
Та — постоянная времени интегрирования.
Постоянная времени интегрирования является параметром настройки И-регулятора. Изменяя Та, можно изменять воздействие регулятора на объект регулирования.
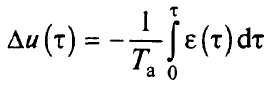
Интегральный закон регулирования можно записать в другой форме:
![]() ,
,
из которой видно, что скорость изменения регулирующего воздействия пропорциональна ошибке.
Поскольку однозначной взаимосвязи между ∆u и ε нет, то и статическая характеристика И-регулятора отсутствует.
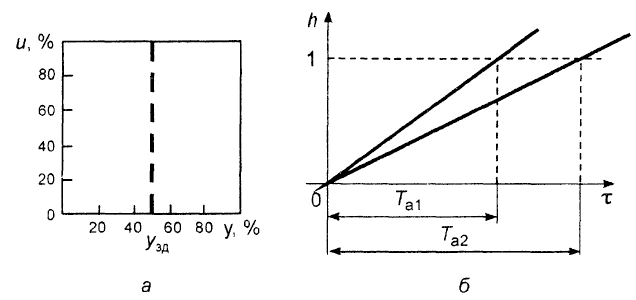
При у = узд скорость перемещения затвора регулирующего клапана равна нулю, а положение затвора регулирующего клапана может быть любым. Это означает, что И-регулятор прекратил свою работу и не терпит остаточного отклонения (установившейся ошибки регулирования).
Основное назначение интегрального закона регулирования — устранение установившейся ошибки регулирования.
Характеристики И-регулятора:
a — псевдостатическая; б — переходные при разных постоянных времени интегрирования.
Передаточная функция И-регулятора имеет вид:
Частотная передаточная функция
Максимальная ошибка в системе с И-регулятором больше, чем у П-регулятора.
Другим недостатком И-регулятора является создаваемый им фазовый сдвиг, равный при всех частотах -π/2, что уменьшает устойчивость системы регулирования.