

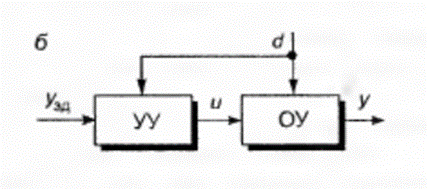
3.06. Регулирование без обратной связи (регулирование по возмущающему воздействию).
В системе управления по возмущающему воздействию кроме информации о цели управления используют также информацию о возмущающих воздействиях.
Используется в случае, когда хорошо изучены свойства объекта управления. Качество управления выше по сравнению с управлением по задающему воздействию, так как можно компенсировать влияние одного из возмущающих воздействий (основного), растет быстродействие.
Характерные признаки:
разомкнутое управление (без обратной связи), следовательно, не поступает информация об управляемом параметре
необходимо точно и верно выбрать канал, по которому может проявиться главное возмущающее воздействие
не используется в СУ нейтральными и неустойчивыми объектами
Достоинства:
быстродействие;
возможность (теоретическая) полной компенсации выбранного возмущающего воздействия;
отсутствие проблем, связанных с устойчивостью.
Недостатки:
учитываются не все возмущающие воздействия, а только одно, тем самым не обеспечивается высокая точность управления (особенно это проявляется при наличии неконтролируемых возмущающих воздействий);
не контролируется результат управляющего воздействия;
стоимость выше, чем у управления по задающему воздействию из-за затрат на измерение возмущающего воздействия
3.07. Одноконтурные и многоконтурные системы автоматического регулирования.
Одноконтурная система управления — это замкнутая система управления с одной регулируемой величиной, имеющая одну главную обратную связь (с одним контуром управления). Контур обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
Одноконтурная система содержит регулятор и объект управления. Система обеспечивает стабилизацию регулируемой величины и обработку простейших типов воздействий при наличии возмущения. В функции регулятора входит преобразование информации об ошибке в управляющий сигнал в соответствии с алгоритмом (законом) управления. Многие объекты химической технологии обладают существенным запаздыванием и характеризуются значительными возмущениями. Использование одноконтурных систем при автоматизации таких объектов не позволяет обеспечить высокого качества регулирования. Поэтому для повышения качества регулирования этих объектов используют более сложные АСР. Многоконтурная система управления — это замкнутая система управления с несколькими контурами управления. В сложных многоконтурных системах осуществляется обратная связь по нескольким составляющим вектора состояния объекта управления, а также могут задаваться воздействия по составляющим вектора входного воздействия и вектора возмущения.
В свою очередь многоконтурные САР делятся на системы несвязанного и связанного регулирования. Характерным для первых является то, что регуляторы в них непосредственной связи между собой не имеют и взаимодействуют только через объект регулирования. В системах связанного регулирования регуляторы различных параметров одного и того же объекта имеют непосредственные взаимные связи помимо связей через объект регулирования.