

1.23. Влияние свойств объекта регулирования: на выбор структуры системы регулирования; на выбор закона действия регулятора; на качество регулирования.
Свойства объектов регулирования: 1. Ёмкость – способность объекта накапливать или сохранять вещество или энергию.
Ёмкость влияет на качество регулирования следующим образом:
ошибка регулирования:
а) для систем регулирования с компенсацией возмущающего воздействия: чем больше ёмкость (С) объекта регулирования, тем меньше ошибка;
б) для следящих и программных систем: чем больше ёмкость, тем больше ошибка.
быстродействие:
увеличение ёмкости объекта регулирования приводит к увеличению времени запаздывания, что уменьшает быстродействие системы.
2. Способность к самовыравниванию.
Способность к самовыравниванию влияет на выбор закона регулирования следующим образом:
пропорциональный закон (П-закон) используется для объектов управления с положительным самовыравниванием и без самовыравнивания (нейтральные) при небольших изменениях входных величин;
интегральный закон (И-закон) нельзя использовать для объектов с отрицательным самовыравниванием (большое самовыравнивание) и объектов без самовыравнивания (нейтральные). При этом, запаздывание должно быть мало;
пропорционально-интегральный закон (ПИ-закон) используется для объектов управления с положительным самовыравниванием и без самовыравнивания (нейтральные) при больших, но плавных нагрузках (для объектов, где необходима большая точность);
пропорционально-интегрально-дифференциальный закон (ПИД-закон) используется для объектов с большим запаздыванием и большой инерционностью, при этом в объекте частое изменение входных величин.
3.
Запаздывание – отношение времени
запаздывания к постоянной времени
 .
.
Влияние на структуру и закон регулирования:
< 0,2 - подойдут двухпоз. регуляторы
- линейный закон. При этом, для отношений: 0,2 - 0,4 - П-закон 0,4 - 0,7 - ПИ-закон 1 - ПИД-закон
> 1 - необходимы многоконтурные САР.
1.24. Основные линейные законы регулирования: уравнения, основные свойства, примеры.
1.26-1.31
1.25. Классификация и особенности законов регулирования.
Линейные
1.26-1.31
Нелинейные
1.32
1.26. Пропорциональный закон регулирования: уравнение, основные свойства, характеристики.
Пропорциональным называют линейный закон регулирования, отражающий прямо пропорциональную зависимость между изменением управляющего воздействия и погрешностью регулирования:
![]()
где Кр — коэффициент усиления, являющийся параметром настройки пропорционального регулятора.
Статические характеристики П-регулятора при различных коэффициентах усиления Кр:
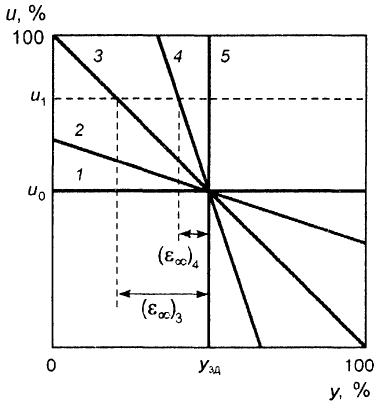
Избавиться от недостатка, присущего пропорциональному закону регулирования – статической погрешности – п ринципиально невозможно. Можно, однако, уменьшить статическую ошибку регулирования, увеличивая Кр.
Передаточная функция пропорционального регулятора:
В динамическом отношении П-регулятор является статическим звеном нулевого порядка.
Переходная характеристика П-регулятора:
![]()
Переходные характеристики П-регулятора при различных коэффициентах усиления
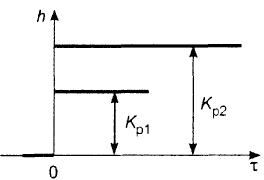
При изменении регулируемого параметра П-регулятор мгновенно формирует управляющее воздействие, т. е. является безынерционным.
Частотная передаточная функция пропорционального регулятора:
![]()
Амплитудная и фазовая частотные характеристики П-регулятора равны:
![]()
Если на вход П-регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний.