

3.11. Критерии (показатели) качества регулирования.
Показатели, характеризующие точность регулирования
Точность регулирования определяется разницей между заданным и текущим значением регулируемого параметра, т. е. ошибкой (погрешностью) регулирования: ε(τ) = yзд(τ) − y(τ).
Погрешность в установившимся режиме (установившаяся погрешность):
ε∞ = lim τ→∞ ε(τ) = yзд(τ) − y(∞).
Максимальное значение погрешности:
εmax = max(yзд(τ) − y(τ)).
Показатели, характеризующие быстродействие переходного процесса
Время нарастания — это время с момента нанесения воздействия до того, как управляемый параметр первый раз достигнет установившегося значения.
Время первого максимума — это время с момента нанесения воздействия до того, как управляемый параметр примет максимальное значение.
Время переходного процесса – время от момента подачи входного сигнала до момента, когда выходная величина достигнет значения, отличающегося от стационарного не более чем на определенную величину.
Показатели, характеризующие колебательность переходного процесса
1. Перерегулирование: σ = ymax − y∞/y∞*100%.
2. Степень затухания: Ψ = A1 − A3/A1*100%.
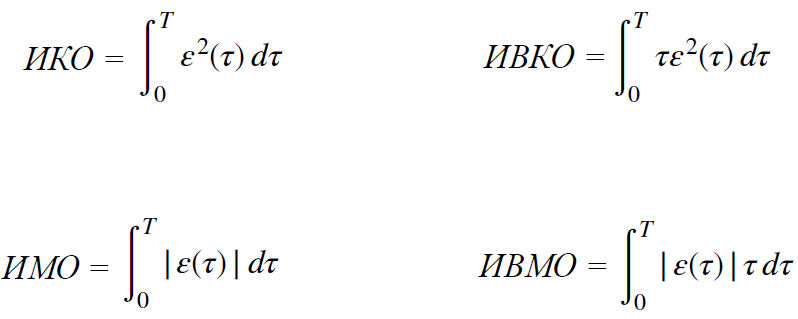
Интегральные показатели качества
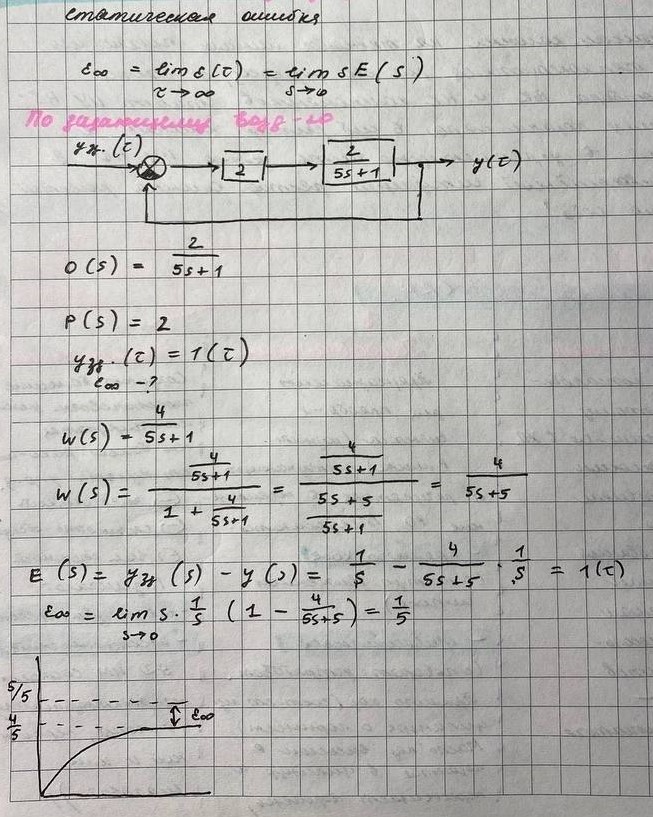
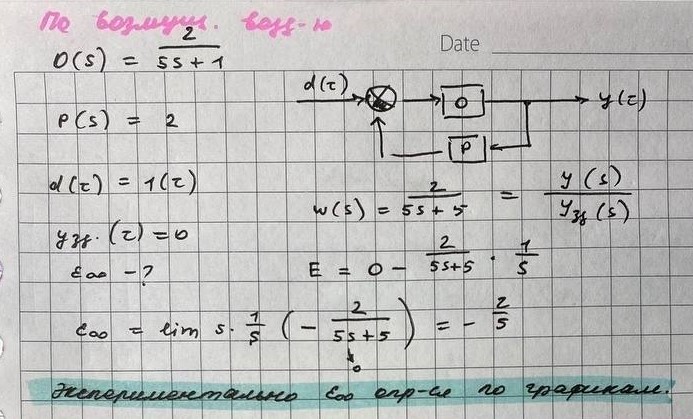
3.12. Определение статической ошибки регулирования экспериментально и по математической модели сау (по каналам возмущающего и задающего воздействий).
3.13. Исполнительные устройства сар.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от управляющего устройства командным сигналом, называется исполнительным устройством. Выходным параметром исполнительного устройства (ИУ) является расход вещества или энергии, поступающих в объект управления или выходящих из него, а входным — командный сигнал управляющего устройства.
Исполнительное устройство содержит, как правило, несколько функциональных блоков. Основными функциональными блоками ИУ являются исполнительный механизм и регулирующий орган.
В зависимости от конкретных условий структура и конструкция ИУ могут существенно различаться.
По виду действия ИУ делятся на нормально открытые (НО) и нормально закрытые (Н3). При прекращении подвода энергии, создающей перестановочные усилия, проходное сечение нормально открытого ИУ полностью открывается, нормально закрытого ИУ — полностью перекрывается.
Исполнительные устройства типа НО целесообразно применять, когда при аварийном прекращении подачи воздуха в исполнительный механизм безопасно иметь открытую технологическую линию (трубопровод). В противном случае применяют исполнительные устройства типа НЗ.
Правильный выбор и расчет исполнительных устройств имеет первостепенное значение, поскольку погрешности в их работе непосредственно влияют на качество управления.
3.14. Исполнительные механизмы систем автоматического регулирования.
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган.
По виду используемой энергии ИМ делят на электрические, пневматические, гидравлические.
Пневматические исполнительные механизмы
Пневматические исполнительные механизмы просты, надежны и удобны в эксплуатации. Они взрыво- и пожаробезопасны, поэтому широко применяются в химической промышленности. Пневматические ИМ обладают высоким быстродействием и точностью позиционирования при умеренном перестановочном усилии и небольших габаритах.
Пневматические ИМ в зависимости от вида чувствительного элемента, воспринимающего энергию сжатого воздуха на мембранные, поршневые, сильфонные и лопастные.
Для обеспечения давления сжатого воздуха необходима компрессионная станция (что означает дополнительные затраты), работают только на малые расстояния (до 200 м).
Гидравлические исполнительные механизмы
Входной сигнал гидравлических исполнительных механизмов – давление масла, соответствующее командному сигналу регулятора. Выпускаются два типа гидравлических исполнительных механизмов: прямого хода (с поступательным движением штока) и кривошипные (с поворотным устройством).
Достоинства: просты, надежны, большие перестановочные усилия h, точные перемещения исполнительного устройства.
Недостатки: необходимость в дополнительной системе трубопроводов для подачи масла, течи масла, необходимость применения мощных насосов.
Электрические исполнительные механизмы
Устройства данного типа создают большие перестановочные усилия, монтируются на большом расстоянии от пульта управления, обеспечивают практически любой ход плунжера.
Недостатки: энергоемкость, сложность обслуживания, высокая стоимость, пожаро- и взрывоопасность, громоздкость, высокая потребляемая мощность, ниже скорость работы. Работают в комплекте с электрическими регуляторами.
Различают электродвигательные и электромагнитные ИМ.