

1.04. Частотная передаточная функция. Применение, примеры.
Функция W(jw) называется частотной передаточной функцией или передаточной функцией Фурье и равна отношению изображения выходного сигнала к изображению входного сигнала:

Частотная передаточная функция характеризует динамические свойства системы и не зависит от характера приложенных к системе воздействий. С ее помощью можно определить реакцию системы не только на гармонический входной сигнал, но и на любой другой входной сигнал, который может быть преобразован по Фурье.
Частотную передаточную функцию можно представить или в виде суммы действительной и мнимой частей:

Функции m(w) и n(w) называются действительной (или вещественной) и мнимой частотными характеристиками звена, а функции А(w) и φ(w) - амплитудной частотной и фазовой частотной характеристиками. Взаимосвязь между характеристиками определяется следующими уравнениями:
![]()
Позволяет анализировать поведение системы в зависимости от частоты. Позволяет определить амплитудно-частотную и фазо-частотную характеристики системы
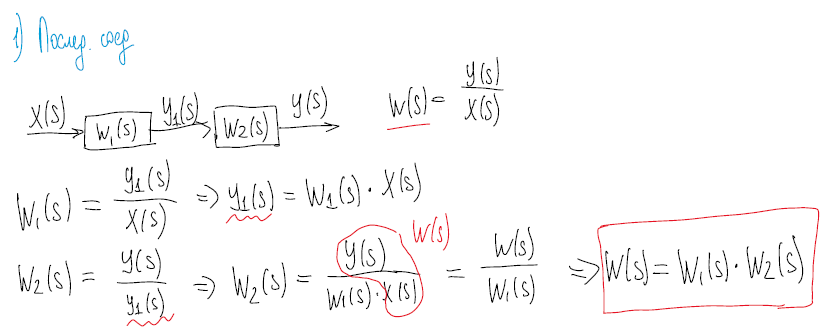
1.05. Передаточные функции типовых комбинаций звеньев (с выводом).
Последовательное соединение:
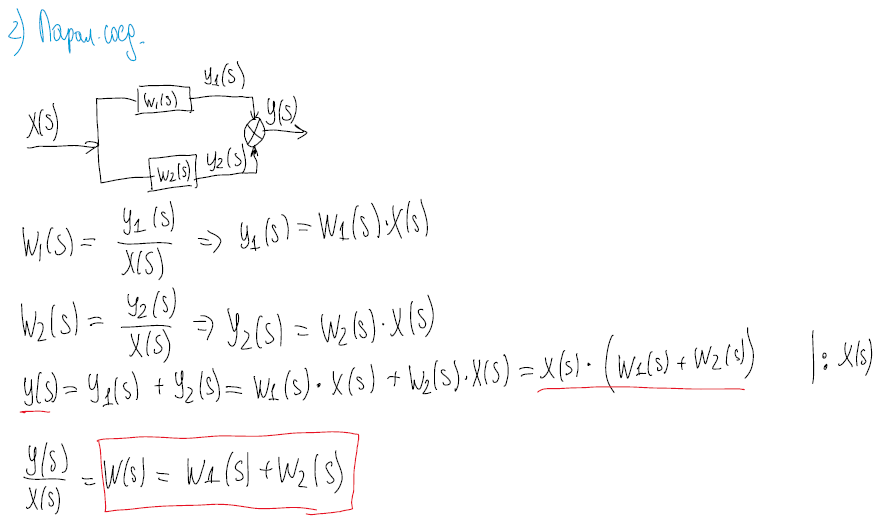
Параллельное соединение:
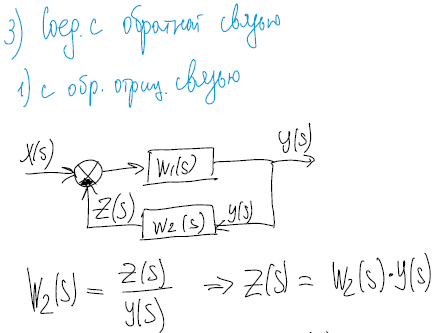
Соединение с обратной отрицательной связью:
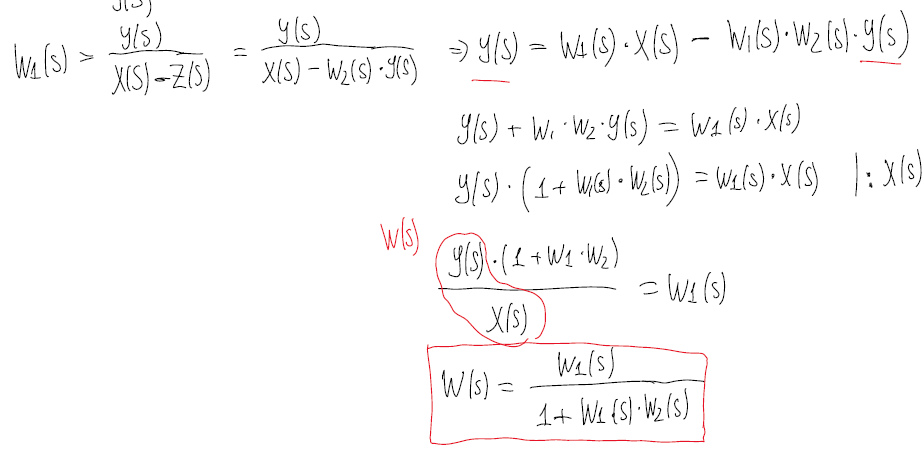
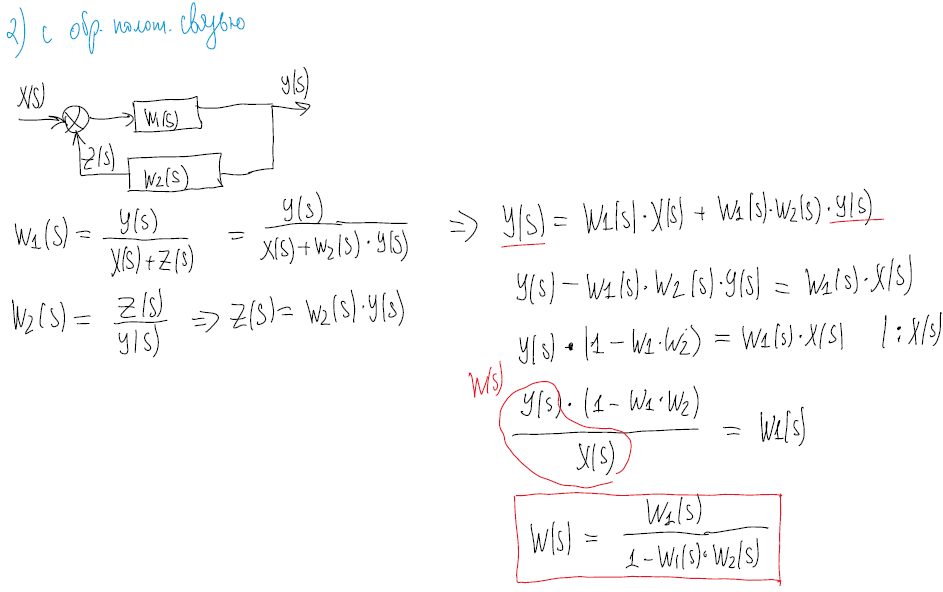
Соединение с обратной положительной связью:
1.06. Изменение свойств динамического звена с помощью обратной связи (примеры).
В системах с обратной связью управляющее воздействие рассчитывают в зависимости от рассогласования между действительным и заданным значениями управляемой переменной, т. е. входной величиной управляющего устройства является ошибка регулирования.
Обратная связь в замкнутой системе управления должна быть отрицательной, в ответ на повышение температуры реакционной смеси в реакторе управляющее устройство должно увеличить расход хладагента, что приведет к уменьшению температуры. Однако в системе управления может возникнуть и положительная обратная связь: при повышении температуры в реакторе управляющее устройство будет уменьшать расход хладагента и тем самым еще больше повышать температуру в реакторе. Одной из причин возникновения положительной обратной связи может быть техническая ошибка при создании системы управления или запаздывание в контуре управления. В результате управляющее воздействие, сформированное в ответ на низкую температуру в реакторе некоторое время назад и направленное на повышение температуры, может начать проявляться в тот момент, когда температура в реакторе уже будет повышена за счет возмущающих воздействий.
1.07. Получение временных характеристик объекта регулирования экспериментально и из его дифференциального уравнения, их использование.
Временной характеристикой звена называют закон изменения выходной величины звена во времени у(τ) в ответ на изменение входного воздействия x(τ) при условии, что до приложения входного воздействия звено находилось в покое. К временной характеристике звена относится переходная функция h(τ) – функция, описывающая реакцию звена на единичное ступенчатое воздействие 1(τ) при нулевых начальных условиях.
Экспериментально строят график зависимостей выходных и входных величин от времени (x(τ), y(τ) или h(τ)). По виду кривой определяют типовые динамические звенья, время запаздывания (если оно есть), постоянную времени Т и т.д. Зная типовое динамическое звено, можно определить передаточную функцию и временные характеристики звена.
Из дифференциального уравнения определяют передаточную функцию с помощью преобразования Лапласа. Зная характер входного воздействия (ступенчатое/импульсное/рамповое), можно найти временные характеристики и построить графики зависимостей входных и выходных параметров от времени.
Экспериментально снятые временные характеристики широко используются для идентификации объектов управления. По виду переходной функции определяют тип звена, а по специальным методикам рассчитывают параметры уравнения (передаточной функции) этого звена.