1.08. Частотные характеристики звеньев.
Реакцию САУ или отдельных ее элементов на гармоническое входное воздействие выражают с помощью частотных характеристик. В отличие от временных характеристик, получаемых в переходных режимах, частотные характеристики определяют в установившихся колебательных режимах.
Частотные характеристики позволяют определить тип регулятора, приемлемого в конкретной системе управления, и сравнительно просто решить задачу об устойчивости САУ. Они дают информацию о критической частоте и предельно допустимом усилении регулятора, о запасах устойчивости и полосе пропускания системы управления. По частотным характеристикам можно также судить о временных характеристиках, что особенно важно при синтезе систем управления.
При гармоническом входном воздействии после завершения переходного процесса выходная величина динамического звена также совершает гармонические колебания с частотой, равной частоте входных колебаний. При этом колебания выходной величины смещены по фазе относительно колебаний входного сигнала на величину

1.09. Исследование систем управления с помощью частотных характеристик.

Отличительная особенность частотных методов – робастность (грубость). Созданная с помощью частотных методов система управления сохраняет требуемые характеристики, несмотря на небольшие различия между реальной системой управления и теоретической моделью.
Частотные характеристики можно получить на основе математической модели САУ и экспериментально. Экспериментальный метод применяют, когда невозможно получить математической описание системы из-за сложности или малой изученности системы.
С помощью частотных характеристик можно:
проверить адекватность математической модели системы, построив ее частотные характеристики и сравнив их с экспериментальными частотными характеристиками реальной системы;
получить характеристику системы в целом по характеристикам отдельных элементов системы независимо от их числа;
определить тип регулятора, критическую частоту, предельно допустимое усиление регулятора, запас устойчивости и полосу пропускания системы управления;
исследовать временные характеристики.
Определяя в установившемся режиме отношение амплитуд колебаний выходной величины и входного сигнала и фазовый сдвиг между колебаниями выходной величины и входного сигнала при разных частотах колебания входного сигнала, можно экспериментально получить частотные характеристики звена.
1.10. Статические звенья нулевого и первого порядка: уравнение, примеры, характеристики, основные свойства.
Статическое звено нулевого порядка (безынерционное, усилительное, пропорциональное):
![]()
Выходная величина статического звена нулевого порядка пропорциональна входной величине в каждый момент времени.
Передаточная функция статического звена нулевого порядка является постоянной величиной и равна его коэффициенту усиления (передаточному коэффициенту) К.
При подаче на вход статического звена нулевого порядка единичного ступенчатого воздействия оно передает входной сигнал мгновенно, без всяких искажений и запаздывания. Может наблюдаться изменение масштаба (увеличение или уменьшение) входного сигнала, которое определяет величина статического коэффициента усиления.
Переходная функция:
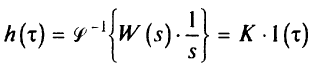
Импульсная переходная функция:
![]()
Рамповая переходная функция:
![]()
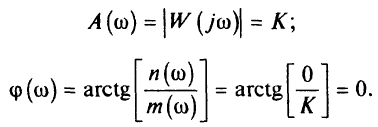
Частотная передаточная функция статического звена нулевого порядка:
![]()
Амплитудно-частотная и фазово-частотная характеристики (АЧХ и ФЧХ) звена не зависят от частоты и равны:
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ) статического звена нулевого порядка, выраженная в децибелах, определяется формулой
![]()
Звено называется статическим звеном первого порядка (или инерционным, устойчивым, апериодическим), если его входная и выходная величины связаны между собой дифференциальным уравнением
![]()
где Т — постоянная времени (имеет размерность времени) статического звена первого порядка.
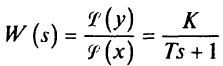
Передаточная функция статического звена первого порядка:
Переходная функция статического звена первого порядка:
 =>
=>
Время, необходимое для достижения нового установившегося значения выходной величины h∞, теоретически бесконечно велико.
Постоянная времени определяет динамические свойства звена. Чем больше постоянная времени, тем медленнее протекает переходный процесс.
Постоянная времени — мера инерционности звена.
Постоянной времени звена (системы) называется время, в течение которого его выходная величина достигает нового установившегося значения, если она меняется с постоянной скоростью, равной начальному значению после нанесения на вход звена (системы) единичного ступенчатого воздействия.
Импульсная переходная функция статического звена первого порядка

Рамповая переходная функция статического звена первого порядка

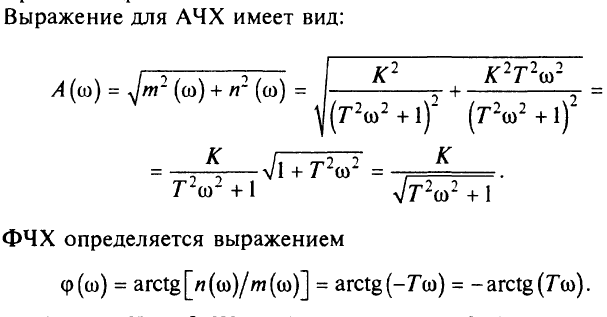
Частотная передаточная функция

ЛАЧХ статического звена первого порядка, если ее выражать в децибелах, определяется уравнением