

ТРАНСПОРТНО-ГРУЗОВЫЕ СИСТЕМЫ УП (3)
.PDFРис. 2.15. Стационарный роторный вагоноопрокидыватель
41
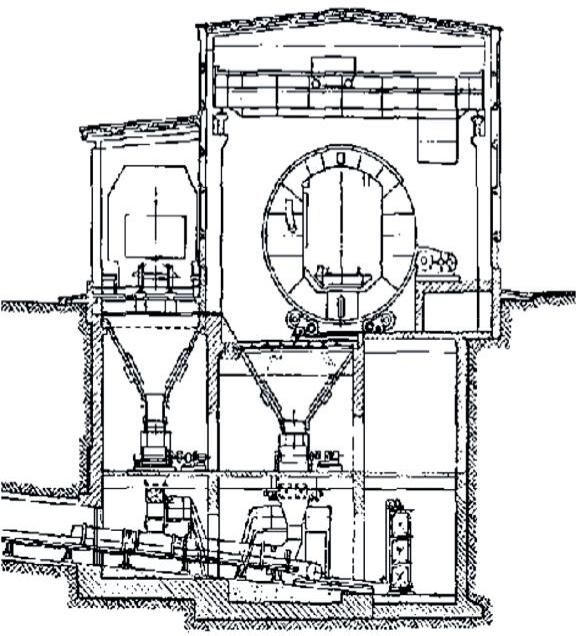
Рис. 2.16. Схема установки роторного вагоноопрокидывателя
2.9.Определение производительности погрузочно-разгрузочной машины (ПРМ)
Эксплуатационная производительность – это количество груза, пе- рерабатываемого ПРМ за один час с учетом внутрисменных техноло- гических перерывов (прием-сдача смены, обед, перестановка вагонов, техническое обслуживание механизма и др.).
Эксплуатационная производительность ПРМ может быть принята по ЕНВ [8] или рассчитана по формуле:
42
Πэкс = Πтех × Κвр , |
(2.4) |
где Κвр – коэффициент использования ПРМ по времени в течение 1 часа, можно принять равным 0,7–0,8; Πтех – техническая производительность
погрузочно-разгрузочной машины.
Под технической производительностью понимают количество груза в тоннах, кубометрах, штуках и других единицах, которое может переработать ПРМ за один час непрерывной работы в условиях максимальной загрузки.
Техническая производительность погрузочно-разгрузочных машин перио- дического действия (краны и погрузчики) определяется, т/ч, по формулам:
– для штучных грузов
Πт = Gгр × nц ; |
|
|
(2.5) |
|
– для массовых кусковых и сыпучих грузов |
|
|
|
|
Πт = ψ ×Vг ×γ ×nц , |
|
|
(2.6) |
|
где Gгр – количество груза, перемещаемого за один цикл, т; |
nц |
– количе- |
||
ство циклов, выполняемых краном или погрузчиком |
за |
час |
работы; |
|
Vг – емкость ковша или другого захвата при перегрузке кусковых или сы- |
||||
пучих грузов, м3; ψ – коэффициент заполнения ковша; γ |
– объемная мас- |
|||
са груза, т/м3. |
|
|
|
|
Количество циклов крана |
|
|
|
|
n = 3600 , |
|
|
(2.7) |
|
ц |
Τц |
|
|
|
|
|
|
|
|
где Τц – продолжительность одного цикла, с. Длительность рабочего цикла
Τц на практике определяют путем хронометражных наблюдений за работой машины. В ориентировочных расчетах Τц можно принять по табл. 2.8.
43
Таблица 2.8
Данные для ориентировочного расчета технической производительности ПРМ
|
|
|
Продолжительность |
|
Вид перерабатываемого груза |
Тип применяемой машины |
цикла работы |
||
машины Τц , с |
||||
|
|
|
||
Тарно-штучные грузы крытого |
Малогабаритный дизельный по- |
60 |
||
хранения |
грузчик грузоподъемностью 1,5 т |
|||
|
||||
|
Малогабаритный |
электропо- |
80 |
|
|
грузчик |
|
||
|
|
|
||
Тяжеловесы, лесоматериалы, |
Козловой, мостовой краны |
200–230 |
||
металлы и металлоизделия |
Автопогрузчик грузоподъемно- |
144 |
||
|
стью 5–10 т |
|
||
|
|
|
||
Контейнеры: |
|
|
|
|
среднетоннажные |
Козловой, мостовой краны |
120–140 |
||
крупнотоннажные |
Козловой, мостовой краны |
160–200 |
||
|
Автопогрузчик |
дизельный |
|
|
|
(«Кальмар», «Валмет», «Хай- |
50–60 |
||
|
стер» и др.) |
|
|
|
Насыпные грузы |
Ковшовый погрузчик с ковшом |
50–70 |
||
|
емкостью 1,5–3,5 м3 |
|
||
|
Экскаватор |
|
15–20 |
|
|
Кран козловой |
|
170–180 |
|
|
Бульдозер на базе трактора |
30–55 |
||
Количество груза G , поднимаемого ПРМ за один цикл для тарно- штучных, можно принять равным грузоподъемности погрузчика в тоннах. Для контейнеров – в штуках и равным одному контейнеру. Для лесных, тя- желовесных грузов и металла количество груза в одном захвате равно:
G = 0,75Γпрм , |
(2.8) |
где Γ прм – грузоподъемность ПРМ.
Для насыпных грузов, перерабатываемых с помощью ковша или грей- фера:
G = V ×γ ×ψ , |
(2.9) |
где V – объем грейфера (ковша), м3; γ – объемная масса груза, т/м3, при- ведена в табл. 2.9; ψ – коэффициент заполнения грейфера (ковша), при-
нимается ψ = 0,75–0,9.
44
|
|
Таблица 2.9 |
|
|
Характеристика грузов |
|
|
|
|
|
|
Наименование груза |
Объемная масса, т/м3 |
Угол естественного откоса |
|
|
|
в покое, град. |
|
Уголь каменный |
0,8–0,85 |
45 |
|
Руда |
1,7–3,5 |
50 |
|
Кокс |
0,4–0,5 |
50 |
|
Гравий |
1,5–2,0 |
45 |
|
Песок |
1,4–1,6 |
32–35 |
|
Цемент |
1,1–1,3 |
40 |
|
Зерновые: |
|
|
|
пшеница |
0,7–0,83 |
35 |
|
рожь |
0,68–0,79 |
35 |
|
ячмень |
0,6–0,75 |
35 |
|
Удобрения |
1,7–2,0 |
50 |
|
Лесные |
0,46–0,7 |
– |
|
Производительность ПРМ находится в прямой зависимости от конст- руктивных качеств захватных устройств, правильного подбора их к кон- кретному грузу и условий работы с ним. При выборе грузозахватных уст- ройств следует руководствоваться справочными данными [10] и рекомен- дациями табл. 2.10.
Таблица 2.10
Использование основных видов грузозахватных приспособлений в зависимости от рода груза
Наименование груза |
Грузозахватные приспособления |
Тарно-штучные |
Вилочный захват, зажимы, штыри, |
|
захваты-кантователи |
Контейнеры: |
Четырехстропный захват с крюками, |
среднетоннажные |
полуавтоматические захваты, |
|
автостроп ЦНИИ-ХИИТа |
крупнотоннажные |
Траверсы со стропами, |
|
полуавтоматический захват, спредер |
Тяжеловесные |
Четырехзвенные стропы; тросы; то же с |
|
траверсами; автоматические захваты |
Круглый лес: |
|
навалом |
Торсы, грейферы лесные трехлапные |
в пакетах |
Четырехзвенные стропы; то же с травер- |
|
сами; полуавтоматические захваты |
Пиломатериалы в пакетах |
Четырехзвенные стропы; то же |
|
с траверсами; автоматические захваты |
|
с поворотными лапами |
Насыпные (гравий, песок, уголь, кокс, руда) |
Ковши, грейферы |
Металлопродукция |
Электромагниты; четырехзвенные стропы |
45
Техническая производительность погрузочно-разгрузочных машин и
установок непрерывного действия определяется в зависимости от рода груза и вида ПРМ.
Производительность ленточных конвейеров, т/час:
• для тарно-штучных грузов
Πт = 3,6 |
Gгр |
υ, |
(2.10) |
|
|||
|
l |
|
|
где Gгр – масса одного грузового места, кг; l – расстояние между грузами, м; υ – скорость перемещения груза, м/с.
• для навалочных (сыпучих и кусковых) грузов |
|
Πт = 3600F ×υ×γ , |
(2.11) |
где F – площадь поперечного сечения перемещаемого груза, м²; γ – объ-
емная масса груза, т/м³; υ – скорость перемещения груза, м/с. Производительность пластинчатых конвейеров с плоской поверхно-
стью, т/час:
Πт = 650Κн × Β2 ×υ×γ ×tgρ, |
(2.12) |
где Κн – коэффициент снижения производительности, зависит от угла на-
клона конвейера к горизонту; Β – ширина ленты конвейера; |
ρ – угол есте- |
ственного откоса груза в движении, град. |
|
Производительность скребкового конвейера, т/ч: |
|
Πт = 3600Κн ×j× Β ×h×υ×γ, |
(2.13) |
где Β и h – рабочие ширина и высота желоба; ϕ – коэффициент заполне- ния желоба; υ – скорость движения скребков, м/с.
Производительность винтовых конвейеров, т/ч: |
|
Πт = 3600Κн ×j× F ×υ×γ , |
(2.14) |
Производительность ковшовых элеваторов определяется по вместимо- сти ковшей, т/ч:
Π |
тех |
= 3,6 |
Εк |
ψ ×γ ×V |
, |
(2.15) |
|
||||||
|
|
|
к |
|
|
|
|
|
|
lк |
|
|
|
46
где Εк – емкость ковша, м3; lк – шаг ковшей, м; ψ – коэффициент запол- нения ковша; γ – объемная масса груза, т/м3; Vк – скорость перемещения
ковша, м/с.
Производительность элеваторов для штучных грузов определяется аналогично производительности конвейеров для тарно-штучных грузов по формуле (2.10).
2.10.Телемеханическое и автоматическое управление погрузочно-разгрузочными машинами и установками
Всовременных транспортно-складских комплексах широко используют тележки с автоматическим направлением движения. Часто они оборуду- ются перегрузочными манипуляторами. Это позволяет не только переме- щать грузы по заданному маршруту к определенным рабочим позициям, но и перегружать их. Управление тележками осуществляется при помощи различных направляющих систем. К ним относятся индуктивные, инерци- онные, оптические, лазерные, ренерные и др. При использовании тележек
синдуктивным управлением под полом склада в специальной траншее прокладывают управляющий кабель, по которому подают с определенной частотой импульсы электрического тока. Вокруг управляющего кабеля возникает магнитное поле, которое взаимодействует с электромагнитными катушками, распложенными на тележках. Последние соединены с управ- ляющим механизмом тележек.
Инерционные направляющие системы основаны на применении гиро- скопа. Любое отклонение от установленного пути движения создает уско- рение, направленное перпендикулярно этому пути, что воспринимается
гироскопом и преобразуется в корректирующие действие сервомеханизма системы управления.
Воптических и лазерных направляющих устройствах по маршруту дви-
жения тележек укладывается специальная лента или наносится краской полоса. На тележке устанавливают излучатель ультрафиолетовых лучей или лазер, направленный на ленту. Различное по спектру отражение счи-
тывается и преобразуется в сигналы управления направлением движения тележек. В ренерных направляющих системах предусмотрено использова-
ние набора нескольких широких и узких полос из краски или установка в определенных местах маяков базового положения. В запоминающем уст-
ройстве бортового компьютера на тележке заложены коды набора полос или карта размещения маяков. Это позволяет автоматически менять на- правление движения тележек.
Внастоящее время появились новые разработки в этой области. Так, фирма «Шиндлер Дигитрон» (ФРГ) спроектировала систему, в которой транспортное средство способно покидать сформированный направляю- щим проводником маршрут, отклоняться от него на некоторое расстояние
47
и выполнять там соответствующие манипуляции с грузом (например, принимать и выдавать поддоны). Эти действия обеспечиваются при по- мощи автономного блока управления движением, расположенного на борту электротележки и возвращающего ее на прежний маршрут. При та- ком принципе автономного поиска пути следования, осуществляемого транспортным средством, трасса перемещения задается непосредствен- но тому или иному транспортному средству путем ее набора на клавиату- ре бортового управления.
Для управления комплектовщиками грузов, передвигающихся между стеллажами, используют программное управление, которое позволяет управлять машиной не только в горизонтальном направлении, но и зада- вать нужную высоту ее подъемному устройству в вертикальном положе- нии. Начало движения и остановка, повороты, движения вверх и вниз платформы и ее остановка на требуемой высоте осуществляются автома- тически. Оператор только управляет длительностью остановок, связанных с процессом взятия и укладки груза. Если он не сообщает, что можно дви- гаться, машина не тронется с заданного пункта.
Существует полностью автоматическое управление всем процессом. В этом случае система исключает оператора, вместо него машина оборуду-
ется различного вида приспособлениями для загрузки и разгрузки грузовой платформы. Все операции производятся согласно заданной программе.
На некоторых погрузчиках, изготовленных в США, применена фотоко- пирующая система, обеспечивающая возможность водителю осуществ- лять дистанционный осмотр груза и места его размещения для сокраще- ния времени и трудоемкости транспортной работы. Сигналы с видеокаме- ры выводятся на экран монитора, установленного на погрузчике.
На погрузчиках, изготовляемых фирмой «Cule Controls.Ltd» (Велико- британия), установлено радиооборудование, которое позволяет обеспечи- вать автоматическую передачу данных от центрального пульта управле- ния водителю погрузчика.
Вилочный погрузчик модели «Mini Bison» оснащен видеоустройством для приема закодированной командной информации на выполнение тран- спортно-складских операций (например, взять поддон с грузом в одном месте и переместить в другое). Команды выдаются микроЭВМ, контроли- рующей транспортно-складские процессы на данном участке.
Для загрузки и разгрузки конвейерных систем в складах, подачи порож- них поддонов, тары, упаковочных материалов используется транспорти- рующая система «Спрут-1». Он состоит из двух манипуляторов, переме- щающихся по транспортной рельсовой трассе, и устройства управления. Последнее имеет пульт, с помощью которого программным путем задают- ся транспортные операции и режимы работы механизмов. Грузоподъем- ность манипулятора 250 кг, скорость передвижения 0,5 м/с.
48
Дистанционное управление механизмами и оборудованием кранов можно осуществить при помощи переносного пульта. Применение пере- носного пульта повышает точность выполнения работ при захвате или от- даче груза, или точной посадке на место его установки при погрузке- выгрузке, благодаря тому, что крановщик находится в непосредственной близости от груза.
При значительном удалении пульта управления от места работы, а
также при перемещении машины на большие расстояния применяется система управления механизмами по радио. Управление краном с земли осуществляется портативным радиопередатчиком, радиус действия кото- рого составляет 60 м и более.
При дистанционном управлении и особенно при радиоуправлении для наблюдения за работой кранов и перемещением груза применяют про- мышленные телевизионные установки с проводной связью или радиосвя- зью на микроволнах. Передающую телевизионную камеру устанавливают у места работы, а приемную – у пульта управления.
Автоматическое программное управление кранами с механизмами вращения и изменения вылета стрелы осуществляется путем установки на механизмах кранов конечных выключателей, автоматически или дистан- ционно регулируемых в зависимости от пройденного пути или угла поворо- та крана. Автоматическое программное управление этими кранами более сложно и пока имеет ограниченное применение на портальных и башен- ных кранах.
При работе с контейнерами вопросы исключения ручного труда наибо- лее остро стоят при застропке (отстропке) контейнеров. С этой целью все основные краны, применяющиеся при переработке среднетоннажных кон- тейнеров (КК-5, КК-6, КК-6,3, КДКК-10) с пролетом 16 м, оборудованы авто- стропами системы ЦНИИ-ХИИТ с дистанционным (телемеханическим) управлением из кабины крана. Эти краны обслуживаются без стропальщи- ков, что значительно повышает производительность кранов и улучшает технику безопасности при выполнении погрузочно-разгрузочных работ.
Крупнотоннажные контейнеры перегружаются с помощью автоматических захватов (спредеров), рассчитанных на работу с контейнерами 1С (1СС). Этими автоматическими захватами оборудованы краны КК-20, КК-25, КК-30,5, КК-32, которые составляют основной парк ПРМ при работе с этим грузом. Конструкция захвата позволяет установить датчики веса контейнера и ограничитель грузоподъемности. Кран КК-32 снабжен двумя спредерами, один из которых рассчитан на работу с 20- и 24-тонными контейнерами, а другой – с 30-тонными контейнерами.
Для автоматизированной перегрузки рулонов бумаги и металлических слитков на крановой тележке мостовых и козловых кранов устанавливают телескопические колонны с клещевым захватом. Управление захватным
49
устройством осуществляется из кабины машиниста или дистанционно с пульта управления.
Автоматизированное дистанционное управление конвейерами и элева- торами предусматривает пуск и остановку конвейерно-элеваторной линии посредством нажатия кнопки пульта управления, а также автоматическое
регулирование и контроль за правильностью работы всех звеньев линии в соответствии с установленным режимом их работы.
Автоматическое регулирование работы конвейеров и элеваторов за-
ключается в поддержании постоянного значения их рабочих параметров или состояния их рабочих органов.
Для автоматического регулирования производительности конвейеров используются бесконтактные емкостные датчики, располагаемые над гру- женой ветвью конвейера, которые с изменением наличия слоя груза на
ленте подают импульс загрузочному устройству на увеличение или уменьшение подачи груза.
Для регулирования положения ленты на конвейере и ее центрирова- ния, кроме центрирующих опор, применяется центрирующее устройство со следящей системой положения ленты на конвейере. При сходе в сторону лента перемещает дефлекторный ролик следящей системы, который че- рез рычажную систему действует на шток золотника, перемещая его из нейтрального положения в ту или другую сторону, и под действием гидро- привода осуществляется поворот роликоопор и возвращение ленты в цен- тральное положение. При обрыве ленты ее ветвь повисает, ролик, вклю- ченный в цепь, под влиянием собственного веса опускается и разрывает цепь, отключая электродвигатель.
Для управления и автоматического регулирования загрузочных и раз-
грузочных устройств и контроля уровня заполнения бункерных и силосных установок применяют различные датчики.
Наиболее просты по конструкции мембранные и диафрагменные дат- чики. Их монтируют в стенках бункера или силоса заподлицо с их внутрен- ней поверхностью. Мембрана под давлением груза прогибается и давит на шток, который свободным концом контактирует с выключателем элек- трической цепи привода и сигнальных ламп.
Электрические датчики представляют собой крыльчатки или щупы. Крыльчатки крепятся на металлическом стержне. В бункере размещается две крыльчатки: одна служит для определения нижнего (минимального), другая верхнего (максимального) уровня груза. Крыльчатки верхнего и нижнего уровней получают вращение от малогабаритных электродвигате- лей. Достигнув уровня груза, они останавливаются, электродвигатели вы-
ключаются ртутными переключателями и дают сигнал в электрическую цепь загрузочным устройством.
В фотоэлектрических датчиках лучи света от лампы, расположенной на одной стороне бункера, попадают на фотоэлемент, установленный на
50