

Konspekt_lektsionnykh_zanyaty_MKvSU
.pdfсостояния с входами данных ПЗУ, ОЗУ, ПА, БППр. Генератор формирует тактовые импульсы для работы ЦП.
7.3 Регулирующий микропроцессорный контроллер - ремиконт – является аппаратно-программным средством многоканальных систем автоматического регулирования (на 8 – 16 каналов) и ориентирован по своим функциональным возможностям как для работы в локальных системах, так и в распределенных системах управления. В последних ремиконт является узлом локальной управляющей вычислительной системы, выполняющим типовой состав функций регулирования. Для включения ремиконта в распределенную систему управления в его состав входит специальный блок сопряжения с сетевой магистралью. Особенностью ремиконта является внутреннее программное обеспечение, не требующее внешних программных средств – операционных систем, транслятора, ассемблера и т.п. Оператор работает с ремиконтом, как с традиционным аналоговым средством, и требуемый алгоритм, его параметры, связи с внешней аппаратурой набираются оператором с помощью обычных клавиш, обозначенных на панели оператора терминалами символами, общепринятыми в промышленной практике автоматизации. Представление информации оператору осуществляется при помощи светодиодных и цифровых индикаторов.
Другая особенность ремиконта состоит в возможности подключения к его входам аналоговых и дискретных датчиков, а на выходах ремиконта формируются аналоговые и дискретные сигналы сигнализации и управления стандартными исполнительными устройствами.
Третья особенность ремиконта заключается в программной реализации типового состава функций для систем автоматического управления локального уровня и подсистем АСУ ТП. Типовой состав функций ремиконта включает 25 алгоритмов регулирования: аналоговые и импульсные стандартные ПИДалгоритмы, ПИД-алгоритмы с нуль-органом, с дифференцированием, с автоподстройкой; динамические преобразования (дифференцирование, интегрирование, слежение, программное задание); нелинейные преобразования (формирование кусочно-линейных функций, булевых функций, селектирование) и другие функции.
Алгоритмическое обеспечение ремиконта оформлено в виде библиотеки алгоблоков из которых потребитель выбирает интересующие его блоки. На рис. 5 изображена функциональная структура алгоблока. Каждый алгоблок имеет 8 входов и три выхода (один аналоговый и два дискретных). Рис. 5 показывает возможные коммутации на панели оператора ПО:АВТ - автоматическое управление через узел задания ЗДН, от ведущего алгоблока (ВДЩ) при каскадном регулировании(КСК), от УВМ при супервизорном управлении, ручное управление РУЧ с панели оператора.
В секцию алгоритма помещается один из алгоритмов управления библиотека алгоритмов ремиконта содержит 25 алгоритмов) В секции конфигурации размещается информация, указывающая па элементы виртуальном структуры, с которыми соединяются входы и выходы алгоблока.
51
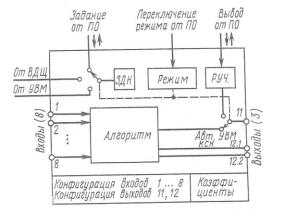
Рисунок 5 - Состав аглоблока ремиконта (пример)
Секция коэффициентов алгоблока содержит коэффициенты статической и динамической настройки. Алгоблоки (в РЕМИКОНТ Р-100 их 64) и библиотека алгоритмов оформлены в виде программ в памяти ПЗУ8.1 и ПЗУ8.2. Рассмотренные выше программируемые контроллеры иллюстрируют чрезвычайно распространенное в мире направление в области средств автоматизации. Разработкой и производством их занимаются многие зарубежные фирмы. Темпы роста объема производства программируемых контроллеров, например в США оцениваются на период до 1990 г. 80% при объеме выпуска к 1987г. более чем на 1 млрд. долл. В большом количестве модификации и объемах контроллеры выпускаются странами западной Европы и Японией.
Основные тенденции в развитии программируемых контроллеров состоят в модульном принципе построения, в использовании встроенных устройств программирования, средств диагностики работоспобности работать автономно и, что обеспечивает наибольший эффект, в сети контроллеров; в резервировании как на уровне отдельных плат так и на уровне целого устройства, в расширении функциональных возможностей до уровня рассмотренных выше типовых микропроцессорных станций.
Литература: 1осн.[1, 2, 3];2доп. [8]
Контрольные вопросы
1.На чем основана работа конвейера в микропроцессоре.
2.Что такое Ethernet.
3.Задачи на которые ориентирована технология ММX.
4.Что такое микроконтроллер?
5.Что показывает тактовая частота? Что такое регистр?
Тема лекции 11: МИКРОПРОЦЕССОРНЫЕ ПРОГРАММНО-
ТЕХНИЧЕСКИЕ КОМПЛЕКСЫ (ПТК).
Содержание темы: Классификация ПТК. Функциональный состав ПТК. Типовые ПТК. Комплексная автоматизация современного производства
предполагает реализацию систем управления технологическими процессами в виде иерархических многоуровневых распределенных систем управления, наилучшим образом соответствующих принципам организационно-
52
технологического управления территориально рассредоточенным производством. Техническая реализация таких систем осуществляется на основе многомашинной вычислительной системы — локальной управляющей вычислительной сети (ЛУВС) с распределенной обработкой данных. При этом функции, а, следовательно, состав, производительность и программное обеспечение информационно-управляющих вычислительных комплексов (ИУВК), объединяемых в ЛУВС, оказываются чрезвычайно разнообразными, что объясняется разнообразием объектов управления и решаемых задач.
Внастоящей главе рассматриваются принципы построения ИУВК на основе микропроцессорной техники, мини и микроЭВМ.
Особое место – в связи с возрастающим внедрением распределенных АСУ ТП – занимают типовые микропроцессорные средства контроля, регулирования
иуправления, ориентированные на класс объектов, а не на отдельные конкретные технологические процессы. Концепция микропроцессорных средств автоматики вытекает из принципов типизации, унификации и агрегатирования. Развитие типовых микропроцессорных средств, относящихся к рассматриваемой здесь группе средств, идет, как показывает отечественный и зарубежный опыт, в двух направлениях. В соответствии с первым направлением функции контроля, регулирования и управления (нижний уровень распределенных многоуровневых АСУ ТП и локальные системы автоматики) с числом каналов контроля, регулирования и управления от 8 до 256 сосредотачиваются в одной типовой микропроцессорной установке (станции), обладающей необходимой функциональной полнотой, автономностью, конструктивной законченностью. По второму направлению функции управления нижнего уровня АСУ ТП распределяются между специализированными микропроцессорными устройствами (контроллерами).
Вданной теме рассмотрим принципы построения микропроцессорных средств как первого, так и второго направлений. К первым относятся типовая установка контроля и управления и распределенная микропроцессорная система. Ко вторым относится группа программируемых микропроцессорных контроллеров (логический, регулирующий, программно-задающий). Здесь же рассматриваются принципы построения автоматических аналоговых и импульсных регуляторов комплекса и средства централизованного контроля и регулирования. В совокупности все это позволит достаточно полно составить представление о современном состоянии и тенденциях развития устройств преобразования, обработки, хранения информации и выработки команд управления для локальных систем автоматики АСУ ТП.
Установки централизованного контроля и регулирования (ЦКР) являются основным техническим средством централизованных систем контроля, регулирования и управления. Характерными задачами, выполняемыми этим классом систем, являются дистанционный контроль, регулирование и управление ТОУ, территориально отдаленным от центрального пульта оператора. На установки ЦКР в таких системах возлагаются функции измерения технологических параметров, их регистрации (непрерывной или выборочной), сигнализации (звуковой, световой) отклонений параметров от
53
заданных значений, регистрации отдельных событий (например, аварийных), выработки регулирующих двухили трехпозиционных сигналов, управления блоками защиты, логико-командное управление.
Установки ЦКР являются разновидностью более широкого класса информационно-измерительных систем (ИИС). В установках ЦКР измеренные значения параметров технологического процесса сравниваются со значениями этих параметров, принимаемых за нормальные, расчетные. Наиболее простая задача установок с ЦКР – выдача сигналов отклонения от «нормы», сигнализация и, возможно, регистрация.
8.2 Типовые микропроцессорные установки. Типовые микропроцессорные установки (станции) обладают унифицированными техническими структурами для широких классов технологических процессов с числом контуров контроля, регулирования и управления от 8 до 256; модульным программным обеспечением, ориентированным на конкретный процесс; общей базой данных; унифицированным интерфейсом для объединения в составе распределенных АСУ ТП; функциональной полнотой и автономностью и конструктивной законченностью. При разработке таких установок основополагающими являются принципы типизации, унификации и агрегатирования. Наряду с локальными регуляторами, установками ЦКР, ИУВК на базе мини- и микроЭВМ типовые микропроцессорные установки вместе с рассматриваемыми далее программируемыми микропроцессорными контроллерами становятся одними из наиболее распространенных технических средств современных АСУ ТП.
Известными примерами типовых микропроцессорных установок, обладающих перечисленными выше характерными особенностями, могут служить микропроцессорные системы TDC-3000 (фирма «Honeywell», США),
Teleperm (фирма «Siemens», ФРГ), Damatic (фирма «Valmet», Финляндия).
В данном параграфе рассмотрим принципы организации типовой микропроцессорной установки контроля и регулирования и распределенной микропроцессорной системы , построенной на элементной и конструктивной базе описанного агрегатного комплекса МикроДАТ.
Типовая микропроцессорная установка контроля и регулирования, ядром которой является микропроцессорный блок обработки информации, предназначена для построения локальных систем автоматики с числом каналов 8 – 16 либо для включения ее в состав КТС распределенных АСУ ТП на нижнем уровне. Установки подобного назначения поэтому должны удовлетворять требованиям функциональной и конструктивной законченности, автономности. Термин «типовая» в применении к такой установке означает, что она реализует типовой состав функций, который следует из решения задачи типизации КТС для определенного класса объектов, так, например. Рассматриваемая ниже установка контроля и регулирования иллюстрирует возможный подход к построению подобных микропроцессорных технических средств, сочетающих аппаратно-программные средства с аналоговыми. Включение аналоговых средств целесообразно в быстродействующих каналах регулирования повышенной надежности с сигналами от аналоговых датчиков.
54
Всостав системы аппаратных средств САС входят модули контроля текущих значений параметров и положений аналоговых и двухпозиционных ИМ и модули ручного дистанционного управления этими исполнительными механизмами. Все аппаратные модули САС и модули БВП подключены к внешним источникам электропитания БП.
Станция СЦП наряду с элементами МЭУ, ЭВВВ, КДМ, ЭКПД, ОЗУ и ППЗУ содержит контроллер связи СПЦ с видеотерминальными устройствами типа ВТА-2000 и знакосинтезирующим печатающим устройством типа А521 комплекса СМ ЭВМ или DARO 1156.
Взаключении отметим, что, сохраняя достоинства магистральномодульного построения таких агрегатных комплексов ГСП, как КТС ЛИУС-2 и МикроДАТ, система по сравнению с последними позволяет существенно снизить трудозатраты как на разработку программного обеспечения, так и на разработку конструкторской документации при создании и внедрении АСУ ТП благодаря проработке ее функциональной, технической, алгоритмической и программной структур на основе принципов типизации, унификации и агрегатирования.
8.3 Особенности функционирования информационно-управляющих вычислительных комплексов в АСУ ТП. Информационно-управляющий вычислительный комплекс, основное назначение которого в АСУ ТП состоит в управлении совокупностью объектов управления, в том числе и динамических, должен работать в реальном масштабе времени. В этом случае темп поступления информации и темп выдачи управляющих воздействий определяются управляемым процессом и согласованы с его динамическими характеристиками. Реальный масштаб времени заставляет учитывать по крайней мере две особенности систем с ИУВК в контуре управления:
1.Запаздывание при формировании управления на каждом периоде дискретности, обусловленное природой цифрового управления; его величина ограничена допустимым значением, задаваемым при проектировании системы управления, и зависит от состояния управляемого процесса и собственно ИУВК.
2.Эффект старения информации, вызванный тем, что измерение координат в цифровой системе управления осуществляется последовательно во времени с некоторым шагом t, а оценка состояния системы, выработка управляющего воздействия и прогноз поведения системы требуют, как правило, значения вектора измеримых координат в определенный, фиксированный
момент времени tk, где tk+n*Δt — время, необходимое для измерения n координат системы. Поэтому приходится, используя различные способы экстраполяции, восстанавливать значение каждой i-й координаты системы на
интервале времени tk+(n-1)*Δt. Учитывая, что погрешность экстраполяции зависит от статистических характеристик восстанавливаемой функции и от времени экстраполяции, необходимо выбрать такую последовательность опроса датчиков, при которой суммарная погрешность экстраполяции минимально влияла бы на качество управления. Эффект старения информации может привести к ситуации, когда увеличение числа измеримых координат не
55
приводит к улучшению качества управления. По тем же причинам оказывается не всегда выгодным использование сложных алгоритмов экстраполяции, так как это увеличивает время расчетов и, следовательно, увеличивает общее время опроса. Учет реального времени в УВК осуществляется специализированным устройством — таймером.
ИУВК в АСУ ТП работает с большим числом источников и потребителей информации, каждый из которых работает асинхронно, т. е. информация от объектов и запросы на обслуживание поступают в произвольные моменты времени. Асинхронность поступления заявок приводит к тому, что в условиях ограниченного ресурса ИУВК формируется в вычислительной системе очередь на обслуживание. Учитывая, что ИУВК работает в реальном масштабе времени, а информация в системе имеет различную ценность и достоверность, обслуживание заявок в ИУВК является приоритетным. Приоритет задачи может изменяться в процессе функционирования системы управления и зависит от режима работы ИУВК, времени ожидания заявки и состояния управляемого процесса. В связи с необходимостью приоритетного обслуживания заявок в ИУВК организуется система прерываний, под которой понимается совокупность аппаратных и программных средств, обеспечивающая переключение процессора с выполняемой программы на другую, имеющую более высокий приоритет, при этом сохраняется возможность возврата к прерванной программе.
Работа ИУВК в реальном масштабе времени с большим числом источников и потребителей информации в условиях ограниченных ресурсов ИУВК требует организации мультипрограммного режима работы ИУВК, т. е. режима, при котором параллельно выполняется несколько программ путем совмещения работы во времени внешних устройств и процессора. Технические средства ИУВК, работающего в мультипрограммном режиме, должны обеспечивать одновременное хранение в оперативном запоминающем устройстве нескольких программ; допускать параллельную работу процессора и внешних устройств; организацию прерывания программ, а ее программное обеспечение — планировать порядок выполнения задач; распределять ресурсы ИУВК; производить защиту памяти от несанкционированного вмешательства одной задачи в другую при их параллельной работе и выполнять ряд других функций.
При реализации системы управления технологическими процессами и производством в целом необходимо выбирать ИУВК, наилучшим образом удовлетворяющий решаемой задаче. При этом необходимо учитывать, что в современных АСУ ТП информационно-управляющий комплекс очень редко работает как самостоятельное, обособленное, не включенное в ЛУВС устройство. Техническая реализация АСУ ТП в виде локальной вычислительной сети диктуется необходимостью координации работы информационно-управляющих вычислительных комплексов в соответствии с оперативно-календарным планом, состоянием управляемого процесса и требованиями повышенной надежности и эффективности к системе управления. Необходимость иметь ИУВК различного состава и различной производительности удовлетворяется выпуском семейств мини и микроЭВМ
56
(например, одноплатная микро-ЭВМ «Электроника НМС 11100.1», микроЭВМ «Электроника 60», мини-ЭВМ СМ-3(4) или мини-ЭВМ «Электроника 100/25», мини-ЭВМ СМ 1420 и др.), комплексированием ИУВК из функционально законченных устройств (система АСВТ и др.) или из функциональных модулей (система СМ 1800). Здесь же необходимо подчеркнуть, что одни и те же функции в ИУВК могут выполняться как аппаратно, так и программно. Аппаратная реализация может быть многовариантной. Например, в системе мини-ЭВМ СМ-3(4) многопозиционные сдвиги, операции умножения и деления
сфиксированной запятой, а также сложение, вычитание, умножение и деление
сплавающей запятой могут выполняться программно (процессор СМ 2103) и аппаратно (процессор СМ 2104); в свою очередь, аппаратная реализация может быть осуществлена в виде блока расширения арифметики и блока с плавающей запятой (процессор СМ 2104) или в виде специализированного процессора. Модульный принцип организации ИУВК позволяет проектировать комплексы необходимого состава, конфигурации и производительности, а также заменять устаревшее оборудование при модернизации АСУ ТП.
Информационно-управляющий вычислительный комплекс в АСУ ТП (особенно в контуре прямого цифрового управления), как правило, не должен производить сложных расчетов с высокой точностью. Это позволяет использовать в АСУ ТП ИУВК с коротким машинным словом (1—2 байт). Короткое машинное слово, резко снижая объем схемотехнического оборудования, требует разработки вычислительных машин с архитектурой, отличной от архитектуры универсальных ЭВМ, ориентированных на выполнение вычислительных работ большого объема и высокой точности. Особенности архитектуры ИУВК проявляются в организации межмодульной и межмашинной связи.
Достижения микроэлектронной технологии сделали возможным выпуск сравнительно дешевых, высоконадежных и высокопроизводительных вычислительных машин, что, возможно, потребует в какой-то степени пересмотреть вопросы организации системы управления технологическими процессами. Однако представляется маловероятным, что в системах управления сложными динамическими объектами и агрегатами не будут использоваться простые, хорошо зарекомендовавшие себя ИУВК с коротким машинным словом. Это предположение основывается прежде всего на необходимости аналого-цифрового преобразования сигнала ошибки системы и формирования аналогового сигнала управления. В этом плане для АСУ ТП чрезвычайно перспективными представляются однокристальные микроЭВМ со встроенными аналого-цифровыми и цифро-аналоговыми преобразователями.
ИУВК в АСУ ТП должны иметь повышенную надежность, которая достигается резервированием аппаратуры. Здесь следует выделить два основных направления. Первое — разработка ИУВК в виде отказоустойчивой вычислительной сети, включающей в себя несколько ИУВК и допускающей реконфигурации технических и программных средств. Второе — разработка отказоустойчивого (толерантного) ИУВК путем дублирования отдельных
57
блоков и узлов с самодиагностикой и возможностью подключения резервного блока вместо отказавшего.
Перечисленные особенности функционирования ИУВК в значительной степени предопределяют логическую организацию (архитектуру), состав технических средств и программного обеспечения ИУВК.
8.4 Терминальные субкомплексы системы АСВТ. Терминальные вычислительные субкомплексы (ТВКС) выполняются как составная часть ИУВК. В качестве КТС для компоновки ТВКС используются агрегатные модули семейства АСВТ-ПС, объединяемые функциональным назначением. ТВКС могут иметь (но необязательно) собственное устройство управления (контроллер), реализуемое на основе микропрограммного контроллера СМ4401 или микроЭВМ СМ50/60. Использование субкомплексов с контроллерами упрощает компоновку специфицированных ИУВК и повышает эффективность его использования. Выпускаемые промышленностью ТВКС, как правило, допускают подключение к нескольким ИУВК и, следовательно, позволяют компоновать специфицированные многомашинные комплексы повышенной живучести.
При комплексировании специфицированных ИУВК для АСУ ТП терминальные субкомплексы подключаются непосредственно к типовым комплексам, реализуемым на основе СМ 1634 или СМ-2М. При комплексировании специфицированных ИУВК для сравнительно сложных АСУ ТП формируется трехуровневая структура (рис. 7.5): между ТВКС и типовым УВК СМ-2М включаются концентраторы СМ 1634.03, которые увеличивают число подключаемых ТВКС к ИУВК верхнего уровня и, кроме того, осуществляют промежуточную обработку информации, контроль за работой ТВКС и логическую реконфигурацию технических и программных средств при отказах оборудования.
В системе АСВТ-ПС выпускаются субкомплексы различного функционального назначения: субкомплексы внешней памяти, рабочие места операторов (включая оператора-технолога), субкомплексы связи с объектом.
Терминальный субкомплекс для компоновки рабочего места оператора К331-1 СМ 7214. Терминал для компоновки рабочего места оператора (РМО01) предназначен для использования в качестве пульта оператора ИУВК, пульта абонента информационно-справочной системы, пульта оператора-технолога в АСУ ТП и других аналогичных целей. Терминал выполняется на базе микропрограммируемого контроллера МПК4401. В зависимости от модификации (выпускается десять модификаций терминала) терминал имеет один или два выхода на сопряжение ИРПР или 2К и комплектуется псевдографическим дисплеем, знакосинтезирующим печатающим устройством с возможностью вывода графической информации (принтер-плоттер) и накопителем на магнитной ленте.
Связь с ИУВК осуществляется по программному каналу (0,6 мс на один символ) или через канал прямого доступа к памяти (60 К слов/с при расстоянии до 1 км, 15 К слов/с при расстоянии от 1 до 3 км).
58
Для хранения отображаемой информации используется магнитная лента или собственная память дисплея (16 К слов). В качестве дисплея могут быть использованы: монохромный индикатор, который может быть задублирован или заменен на цветной индикатор типа А543-14 или видеоконтрольное устройство ВК40Ц60, ВК59Ц60 и т. п.
Терминальный субкомплекс для компоновки рабочего места операторатехнолога К331-2. Терминал для компоновки рабочего места операторатехнолога (РМОТ-01) предназначен для использования в качестве основного средства связи оператора-технолога с системой в АСУ ТП. Терминал выполняется на базе МПК СМ 4401 и включает в себя: алфавитно-цифровой индикатор на электронно-лучевой трубке (ЭЛТ), два цветных графических индикатора с телевизионной разверткой на ЭЛТ и знакосинтезирующее печатающее устройство. Для ввода команды и другой информации в состав терминала включены две клавиатуры: алфавитно-цифровая и позиционная (64 клавиши).
В качестве функциональных модулей при комплектации субкомплексов связи с объектом используются: модуль аналого-цифрового преобразования А611-21; модули коммутации бесконтактный А612-20, контактный А612-18/2; модуль коммутации и нормализации аналоговых сигналов А614-8; преобразователи код — напряжение А631-8, А631-10; преобразователи код — ток А631-9; счетчик-преобразователь импульсных сигналов А623-4; модуль коммутации и преобразования частотных сигналов А611-23; модули ввода сигналов инициативных А622-11, дискретных А622-12; модуль ввода — вывода дискретных сигналов А641-17; модули вывода дискретных сигналов А641-16, А641-78; модули нормализации А613-11/2-5, А621-1/4-9, А613-16; модули гальванической развязки А613-15, А621-2/4-6; модуль гальванического разделения и нормализации частотных сигналов А621-4/1; видеотерминал алфавитно-цифровой ВТА 2000-10; устройства внешней памяти на магнитной ленте СМ 5211 и магнитных дисках А322-3/1; устройство печати А521-4/6; модули внутрисистемной связи А723-6, А723-7; согласователи интерфейсов ИУС-С2 А721-11, ИУС/ИРПР А711-25; регистр дуплексный с интерфейсом ИУС А711-26/1.
Связь субкомплексов с ИУВК осуществляется через согласователи интерфейсов А711-25 при удалении до 15 м и А723-6 при удалении на расстояние до 3 км.
Литература: 1осн.[1, 2, 3];2доп. [8]
Контрольные вопросы
1.Что такое интерфейс?
2.Функции интерфейса с процессором.
3.Как происходит программно-управляемая передача информации.
4.Какое устройство, предназначено для хранения и обработки двоичного
кода.
Что применяют для оптимального кодирования команд?
Тема лекции 12: ПОСТРОЕНИЕ SCADA-систем НА БАЗЕ ПТК
Содержание темы: Основные функции SCADA-систем. Построение HMI.
59
Литература: 1 осн.[236-241]; 2 осн.[151-155].
Контрольные вопросы:
1.Основные понятия и определения.
2.Этапы развития Скада систем.
3.Отличия и особенности применения различных Скада систем.
4.Назовите основные компоненты, достоинства и недостатки Скада системы.
5.Что такое “эталонная модель взаимодействия открытых систем”?
6.За счёт чего ИВС, организованные согласно требованиям эталонной модели, обеспечивают открытость, гибкость и эффективность?
Тема лекции 13: ПОСТРОЕНИЕ SCADA-СИСТЕМ НА ОПЕРАТОРСКИХ ПАНЕЛЯХ
Содержание темы: Основные функции SCADA-систем. Построение мнемосхем для операторских панелей
Литература: 1 осн.[236-241]; 2 осн.[151-155].
Контрольные вопросы:
5.Основные понятия и определения.
6.Этапы развития Скада систем.
7.Отличия и особенности применения различных Скада систем.
8.Назовите основные компоненты, достоинства и недостатки Скада системы.
7.Что такое “эталонная модель взаимодействия открытых систем”?
8.За счёт чего ИВС, организованные согласно требованиям эталонной модели, обеспечивают открытость, гибкость и эффективность?
Тема лекции 14: ПЕРСПЕКТИВЫ РАЗВИТИЯ
МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ.
Содержание темы: Основные характеристики новых микропроцессоров и микроконтроллеров, интерфейсных модулей, модулей полупроводниковой памяти.
Термином программируемый микропроцессорный контроллер (ПМК) обозначают изделия группы устройств преобразования, обработки, хранения информации и выработки команд управления, реализованных на базе микропроцессорной техники и являющихся по сути специализированными управляющими микроЭВМ для работы в локальных и распределенных системах управления в реальном времени в соответствии с фиксированным набором рабочих программ, размещенным в ПЗУ, а не в ОЗУ.
По своему назначению – областям проблемной ориентации – ПМК бывают:
60