

Konspekt_lektsionnykh_zanyaty_MKvSU
.pdfразмещать на одном кристалле большое число элементарных схем – МОП транзисторов.
Однако МОП-структуры существенно уступают в быстродействии биполярным структурам. Раньше биполярные БИС обладали меньшей плотностью упаковки компонентов на кристалле, поэтому появился второй тип МП – многокристальный биполярный МП. Он основан на конструктивном принципе Функционально-разрядного слоя.
Возможность проектирования системы команд, наилучшим образом учитывающей особенности алгоритмов обработки информации в АСУ ТП, обеспечивается микропрограммным управлением МП.
Функциональная организация микропроцессора. Прежде чем дать подробное описание структуры МП и МП систем, необходимо рассмотреть основные концепции вычислительной техники – архитектуру аппаратного обеспечения и программного обеспечения. Архитектура микропроцессора – функциональные возможности аппаратных электронных средств МП, используемые для представления данных, машинных операций, описания алгоритмов и процессов вычислений.
Архитектура объединяет аппаратурные, микропрограммные и программные средства ВТ и позволяет четко выделить то, что при создании конкретной микропроцессорной системы и использовании возможностей микропроцессорного комплекта должно быть реализовано пользователем программным способом и дополнительными аппаратными средствами. Существует множество типов и классификаций архитектуры вычислительных машин.
Микропроцессор, являющийся универсальным программно управляемым устройством обработки информации, включает в себя: операционное устройство (ОУ), обеспечивающее обработку информации в соответствии с выполняемой командой; устройство управления (УУ), осуществляющее синхронизацию вычислительного процесса МП в соответствии с выполняемой командой и состоянием управляемого процесса; интерфейсные блоки (БИ), обеспечивающие взаимодействие МП с другими модулями МП-системы. В самом общем виде ЦЭВМ можно представить в виде четырех основных блоков:
1.Блок ввода-вывода;
2.Память;
3.Арифметико-логическое устройство (АЛУ);
4.Блок управления;
с помощью которых можно описать любую универсальную ВМ, смотри рисунок 1.
Информация в ВМ подается и выдается посредством устройств вводавывода.
|
|
Ввод-вывод |
|
|
|
|
|
|
Управление |
|
Память |
|
|
|
|
|
|
АЛУ
31
Рисунок 1 – Схема основных блоков МП Внутри самой ВМ, в памяти хранятся как информация, которую надо
обработать, так закодированные операции, которые надо выполнить. Сама обработка выполняется цифровыми логическими схемами, синхронизация которых и распределение порядка работы осуществляется блоком выполнения. Он также координирует работу устройств ввода-вывода, арифметикологического и памяти. Изменяя эту структурную схему, получают различные типы машинной архитектуры.
АЛУ предназначено для выполнения арифметических и логических операций над операндами. АЛУ классифицируются следующим образом:
1.По способу действий над операндами. Бывают АЛУ последовательного
ипараллельного действия. В последовательных АЛУ действия над операндами производятся последовательно разряд, за разрядом начиная с младшего. В параллельных АЛУ все разряды операндов обрабатываются одновременно.
2.По виду обрабатываемых чисел АЛУ могут производить операции над двоичными числами с фиксированной или плавающей запятой и над двоичнодесятичными числами.
3.По организации действий над операндами различают блочные и многофункциональные АЛУ. В блочных АЛУ одни блоки предназначены для действий над двоично-десятичными числами, другие для действий над числами с фиксированной запятой, третьи с плавающей запятой. В многофункциональных АЛУ одни и те же блоки обрабатывают числа с фиксированной запятой, плавающей запятой и двоично-десятичные числа.
По структуре АЛУ бывают с непосредственными связями и многосвязными. В многосвязных АЛУ входы и выходы регистров приемников
иисточников информации подсоединяются к одной шине. Распределение входных и выходных сигналов происходит под действием управляющих сигналов. В АЛУ с непосредственной связью вход регистра приемника связан с выходом регистра источника операндов и регистра, в котором происходит обработка.
Типичная структура микропроцессорного устройства. Центральное место в этой структуре занимает микропроцессор, который подобно процессору обычных ЭВМ непосредственно выполняет логические и арифметические операции над данными, осуществляет программное управление процессом обработки информации, организует взаимодействие всех устройств, входящих в систему.
Представленная структура отражает магистрально-модульный принцип организации микропроцессорных устройств и систем.
Межмодульные связи и обмен информацией между модулями осуществляется посредством коллективных шин, к которым имеют доступ все основные модули системы. В каждый данный момент времени возможен обмен информацией только между двумя модулями системы. Обмен информацией производится путем разделения во времени модулями системы коллективных шин.
32
Для микропроцессоров характерна трех шинная структура, содержащая шину адреса – ША, двунаправленную шину данных – ШД, шину управления – ШУ. Шина адреса используется для передачи адресов памяти и адресов регистров устройств, подключенных к системному интерфейсу. Шина данных используется для обмена информацией между устройствами, шина управления
— для передачи управляющих сигналов. Каждое функциональное устройство, подключенное к системному интерфейсу, рассматривается процессором как совокупность адресуемых регистров, разделяемых на регистры управления и состояния и регистры данных.
Литература:1осн.[ 13-37, 92–103], 20 доп.[36–45] Контрольные вопросы
1.Основные понятия и определения.
2.Этапы развития МП и МП-систем.
3.Назовите основные компоненты, достоинства и недостатки различных архитектур МП.
4.Для чего нужен оператор?
5.Что показывает операнд?
6.Назначение АЛУ (арифметико-логическое устройство).
7.Что такое дешифратор команд?
8.Каковы функции блока управления?
9.Каковы функции блока управления?
10.Для микропроцессоров характерна трехшинная структура, что она содержит.
11.Что представляет собой программа для магазинного процессора.
12.Что такое шина данных?
Тема лекции 4: СОВРЕМЕННЫЕ КОНТРОЛЛЕРНЫЕ СРЕДСТВА.
Содержание темы: Одноплатные, встраиваемые PC-совместимые контроллеры. Релейные универсальные контроллеры. Программируемые логические контроллеры. PC-совместимые контроллеры.
Программируемые контроллеры, начальные сведения. Контроллер это мозг любой автоматической машины, обеспечивающий ее логику работы. Например - контроллер системы впрыска топлива автомобилей, контроллер управления лифтом, автоматом сборки часов, стиральной машиной и т.д. Естественно чем сложнее логика работы машины, тем «умнее» должен быть контроллер. Технически контроллеры реализуются по-разному. Это может быть механическое устройство, пневматический или гидравлический автомат, релейная или электронная схема, или даже компьютерная программа. Часто, контроллер встроен в конкретную машину и обладает жесткой логикой работы, заложенной при изготовлении. Проектирование таких контроллеров окупается только для изделий выпускаемых значительным тиражом. При создании машин занятых в сфере промышленного производства, как правило, приходится иметь дело не более чем с единицами однотипных устройств. Кроме того, очень существенной здесь является возможность быстрой перенастройки оборудования на выпуск другой продукции. Для уникальных проектов, мелкосерийных изделий и опытных образцов также желательно иметь
33
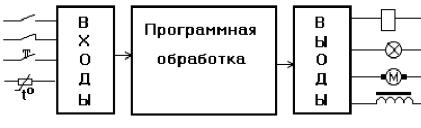
универсальный свободно программируемый контроллер. Идея создания программируемых логических контроллеров (ПЛК) родилась практически сразу с появлением микропроцессора. ПЛК представляет собой вычислительную машину, имеющую некоторое множество входов и множество выходов. Контроллер отслеживает изменение входов и вырабатывает программно определенное воздействие на выходах. Обладая памятью, ПЛК способен реагировать по-разному, в зависимости от предыстории. Такая модель соответствует широко известным конечным автоматам. Однако возможности управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень.
Рисунок 1- Схемотичное изображение контроллера.
ПЛК ориентированы на длительную работу в условиях промышленной среды. Это обуславливает определенную специфику схемотехнических решений и конструктивного исполнения. Хороший ПЛК обладает мощной, совместимой и интуитивно понятной системой программирования, удобен в монтаже и обслуживании, обладает высокой ремонтопригодностью, имеет развитые средства самодиагностики и контроля правильности выполнения прикладных задач, средства интеграции в единую систему, надежен и неприхотлив. Как и для любой ответственной техники, важна организация службы сервиса изготовителя. Необходимо иметь реальную возможность получения бесплатных консультаций и оперативной помощи непосредственно от разработчиков ПЛК, а не «авторизованных» «специалистов».
Что такое дискретные входы? Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. На уровне программы это один бит информации - ИСТИНА или ЛОЖЬ. Кнопки, выключатели, контакты реле, датчики обнаружения предметов и множество приборов с выходом типа «сухой контакт» или «открытый коллектор» непосредственно могут быть подключены к дискретным входам ПЛК. Некоторые первичные приборы систем промышленной автоматики имеют более 2-х состояний. Для их подключения используют несколько дискретных входов. Дискретные входы применимы, если можно выделить несколько определяющих значений непрерывной физической величины или хода процесса. Системное программное обеспечение ПЛК включает драйвер, автоматически считывающий физические значения входов в оперативную память. Благодаря этому, прикладному программисту нет необходимости разбираться с внутренним устройством контроллера. С точки зрения прикладного программиста дискретные входы это наборы бит, доступные для чтения. Все дискретные входы (общего исполнения)
34
контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24В) составляет около 10мА. Для питания внешних датчиков нужен отдельный источник питания. В состав ПЛК источник питания внешнего оборудования не входит. В простейшем случае, для подключения нормально разомкнутого контакта, дискретный вход и сам контакт необходимо подключить последовательно к источнику питания 24В. Все современные датчики, базирующиеся на разнообразных физических явлениях (емкостные, индуктивные, ультразвуковые, оптические и т.д.), как правило, поставляются со встроенными первичными преобразователями и не требуют дополнительного согласования при подключении к дискретным входам ПЛК. Несмотря на внешнюю простоту дискретного входа, его схемотехническое решение и элементная база постоянно совершенствуются.
Мощное вычислительное ядро современных ПЛК делает их очень похожими на компьютеры. Однако ПЛК это не «железо», а технология. Она включает специфическую аппаратную архитектуру, принцип циклической работы и специализированные языки программирования. Программирование ПЛК осуществляется людьми, хорошо знающими прикладную область, но не обязанными быть специалистами в математике. Существуют программы имитирующие работу ПЛК на компьютере. В этом случае, удается совместить на одной машине контроллер, средства программирования и визуализации. Недостатком такого решения является значительное время восстановления при сбоях и повреждениях. Перезагрузка операционной системы (ОС) и запуск прикладной задачи может занимать несколько минут. Переустановка и настройка ОС, драйверов оборудования и прикладных программ требует значительного времени и высокой квалификации обслуживающего персонала. Системное программное обеспечение ПЛК расположено в постоянной памяти в адресном пространстве центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. В целом, в силу дешевизны, надежности и простоты применения, ПЛК доминируют на нижнем уровне систем промышленной автоматики. Они обеспечивают непосредственное управление оборудованием на переднем крае производства.
В первую очередь контроллеры ориентированы на решение задач промышленного производства.
4.2 Классификация микропроцессорных ПТК. Все выпускаемые универсальные микропроцессорные ПТК подразделяются на классы, каждый из которых выполняет определенный набор функций. Рассмотрим ПТК, начиная с простейшего класса, минимального по функциям и объему автоматизируемого объекта, и, кончая классом, который может охватывать задачи планирования и технического управления на всем предприятии:
1.Контроллер на базе ПК
2.Локальный ПЛК
3.Сетевой комплекс контроллеров
4.РСУ малого масштаба
35
5. Полномасштабные РСУ Приведенная классификация помогает охватить всю гамму современных
микропроцессорных ПТК и выделить основные черты и отличия отдельных классов этих средств. Однако эта классификация носит приближенный характер. Четких границ между классами ПТК не существует, а в последние годы они тем более размываются, так как открытость и стандартность отдельных компонентов таких комплексов позволяет компоновать их из разных средств, соединять различными типовыми сетями и создавать систему управления из отдельных компонентов, выпускаемых разными фирмами и относящихся к разным классам.
Контроллеры обычно рассчитаны на десятки входов/выходов от датчиков и ИМ; их вычислительная мощность невелика; они реализуют простейшие типовые функции обработки измерительной информации, логического управления, регулирования. Контроллеры, предназначенные для целей противоаварийной защиты, должны иметь специальный сертификат, подтверждающий их высокую надежность и живучесть. Зарубежные фирмы, работающие в этом секторе рынка:
General Electric Fanuc Automation с контроллерами сер. 90 Micro;
Rockwell Automation с контроллерами сер. Micrologic 1000;
Schneider Automation с контроллерами сер. TSX Nano;
Siemens с контроллерами сер. С7-620.
4.3 Мировые тенденции развития микропроцессорных ПТК
При выборе конкретного ПТК, обобщенная схема которого представлена, необходимо знать общие тенденции развития ПТК, чтобы не приобрести морально устаревший комплекс. Если выбранный ПТК удовлетворяет всем сегодняшним требованиям по автоматизации конкретного объекта, но он недостаточно современен, то это может в дальнейшем при его эксплуатации (а срок службы приобретаемого комплекса должен быть >10 лет) привести к нежелательным последствиям.
4.4 Принципы выбора программируемого логического контроллера.
Наличие различных ПЛК ставит следующий вопрос: как выбрать из этого обилия необходимый именно вам контроллер? Большинству потребителей требуется не превосходство одной какой-то характеристики, а некая интегральная оценка, позволяющая сравнить ПЛК по совокупности характеристик и свойств.
Один из самых важных параметров ПЛК быстродействие в каталогах фирм указывается в совершенно разных вариантах. Могут фигурировать время выполнения бинарных команд, время опроса 1К дискретных входов, время выполнения смешанных команд и т.д.
Цены самый интригующий фактор. Кто-то приводит их в американских долларах, кто-то в немецких марках, при этом курс иностранной валюты очень разный и всегда завышенный.
Учитывая специфику устройств, критерии оценки можно разделить на три группы:
технические характеристики;
36
эксплуатационные характеристики;
потребительские свойства.
При этом критериями выбора считать потребительские свойства, т.е. соотношение показателей затраты/производительность/надежность, а технические и эксплуатационные характеристики ограничениями для процедуры выбора. Кроме того, необходимо разделить характеристики на прямые - для которых положительным результатом является её увеличение (на рисунке обозначены - "*" ) и обратные - для которых положительным результатом является её уменьшение (на рисунке обозначены - "**" ). Так как характеристики между собой конфликтны, т.е. улучшение одной характеристики почти всегда приводит к ухудшению другой, необходимо для каждой характеристики Ki определить весовой коэффициент ai, учитывающий степень влияния данной характеристики на полезность устройства. Терминология и состав критериев оценки ПЛК приведены в соответствии с основными положениями квалиметрии и стандартами качества (ГОСТ 1546779). Выбор аппаратуры производится в четыре этапа:
определение соответствия технических характеристик предъявленным требованиям;
определение соответствия эксплуатационных характеристик предъявленным требованиям;
оценка потребительских свойств выбираемой аппаратуры;
ранжирование изделий.
4.5 Структура ПТК. Она определяется средствами и характеристиками взаимосвязи отдельных компонентов комплекса (контроллеров, пультов оператора, удаленных блоков ввода/вывода), т.е. его сетевыми возможностями. Гибкость и разнообразие возможных структур ПТК зависит от числа имеющихся сетевых уровней, возможных типов связи на каждом уровне сети (шина, звезда, кольцо), параметре в сети каждого уровня: возможных типов кабеля, максимально возможных расстояний, максимального числа узлов (компонентов комплекса), подключаемых к каждой сети, скорости передачи информации при разных типах кабеля, методе доступа компонентов к сети (случайный по времени доставки сообщений или гарантирующий время их доставки). Указанные свойства ПТК характеризуют: возможность распределения аппаратуры в производственных цехах; объем производства, который может быть охвачен системой автоматизации, реализованной на данном ПТК; предельную динамику передачи оперативной информации через любую из имеющихся сетей, возможность переноса блоков ввода/вывода непосредственно к датчикам и исполнительным механизмам, что позволяет существенно сэкономить затраты на кабель и уменьшить помехи из-за передачи низковольтных аналоговых сигналов на большие расстояния. Для компенсации аварийных ситуаций, требующих согласованной во времени работы ряда контроллеров, важно обеспечение требуемого времени передачи приоритетных сигналов по сети. Наличие информационной сети для передачи больших массивов информации между пультами операторов и между ними и сервером корпоративной сети предприятия, а также характеристики этой сети (включая
37
ее протоколы) позволяют судить о возможностях связей рассматриваемой системы автоматизации с другими более высокими уровнями управления производства.
4. 6 Характеристики контроллеров. Свойства и параметры основного компонента ПТК - контроллера - существенно различаются у разных производителей. Если выделить важнейшие для пользователей показатели, то это будут: тип основной вычислительной платы, разрядность, рабочая частота, наличие и объем различных видов памяти: ОЗУ, энергонезависимой, ПЗУ (небезынтересно также знать каков объем памяти, предназначенный для программ пользователя), операционная система контроллера, максимальное число различных входов и выходов (аналоговых, дискретных, импульсных), которые можно подключить к контроллеру. Важным обстоятельством является наличие в конкретном ПТК ряда модификаций контроллеров, отличающихся друг от друга мощностью, памятью, условиями работы, резервируемостью и различными другими параметрами; при этом, естественно, каждая из модификаций может использоваться в единой сетевой структуре.
Знание вышеуказанных характеристик позволяет наилучшим образом согласовать требования к системе автоматизации с возможностями контроллеров; не допустить как применения излишне мощной аппаратуры (а, следовательно, и более дорогой), так и применения контроллеров, которые по ряду параметров не будут полностью удовлетворять заданным условиям работы. Естественно, что наличие ряда модификаций позволит более гибко и экономно подойти к выбору контроллеров для разных участков автоматизируемого объекта.
4.7 Динамика работы ПТК. Важными для многих применений являются динамические параметры ПТК, определяющие возможное быстродействие разрабатываемых цепей контроля и управления. Отдельными показателями динамики являются:
минимальный цикл опроса датчиков и минимальное время реакции на аварийные сигналы при их обработке в цепях аварийной защиты: внутри одного контроллера, при передаче управляющих сигналов через системную сеть, при прохождении сигнала через пульт оператора;
минимальный цикл смены динамических данных в кадре на пульте оператора и смены самих кадров, а также минимальное время реакции на команду оператора с пульта;
минимальное время перезапуска как всей системы, так и только отдельных контроллеров после перерывов питания.
Указанные показатели имеют тем более важное значение, чем более быстро протекают технологические процессы в автоматизируемом объекте.
4.8 Современный рынок контроллерных средств. Основные производители данной продукции: ABB (распространяющая также контроллерные средства фирм Baily Controls и Gartman & Braun), Emerson (бывшая Fisher-Rosemount), General Electric Fanuc Automation, Foxboro, Honeywell, Metso Automation
(поглотила фирму Damatic Automation), Moore Products, Omron, Rockwell Automation, Siemens, Yokogawa, Schneider Automation и др. Всего порядка 15
38
фирм, каждая из которых предлагает от двух до пяти контроллерных средств разных классов.
Около 20 зарубежных производителей меньшего масштаба имеют российских дилеров, внедряющих их контроллерные средства на российских предприятиях (Коуо Electronics, Tornado, Triconex, PEP, Trey, Control Microsystems, GF Power Controls и др.).
Более 20 российских предприятий конкурируют с зарубежными производителями в разных классах контроллерных средств ("Автоматика", ДЭП, "Импульс", "Инсист Автоматика", "Интеравтоматика", "Квантор", НИИтеплоприбор, "НВТ-Автоматика", ПИК "Прогресс", "Саргон", "Системотехника", ТЕКОН, "Электромеханика", ЭМИКОН и др.).
Литература:1осн.[ 13-37, 92–103], 2 осн.[48-81,52–55]
Контрольные вопросы
1.Дайте определение ПЛК
2.Основные элементы ПЛК
3.Классификация ПЛК.
4.Логическая, физическая и программная структура ПЛК.
Тема лекции 5: ОРГАНИЗАЦИЯ ПОДСИСТЕМ ВВОДА-ВЫВОДА МП.
Содержание темы: Состав подсистем ввода-вывода. Организация УСО в МПС. Состав модулей ввода-вывода. Помехи. Подсистемы ввода-вывода аналоговых сигналов. Типы АЦП и метрологические характеристики. Схемы подключения входных стандартных аналоговых сигналов. Схемы подключения входных сигналов термопар. Схемы подключения входных сигналов термометров сопротивления. Схемы подключения выходных аналоговых сигналов. Подсистемы ввода-вывода дискретных сигналов. Схемы подключения стандартных дискретных сигналов. Схемы подключения числоимпульсных сигналов. Схемы подключения частотных сигналов. Схемы подключения выходов дискретных сигналов. резервируемые системы. Распределенное УСО.
Периферийные Устройства МП-Систем. Состав периферийных устройств МП-систем представлен на рисунке 1. Вся наиболее существенная номенклатура ПУ условно разделена на две группы: группа устройств ввода — вывода информации общего назначения и группа специализированных устройств.
Устройства ввода — вывода (УВВ) общего назначения используются не только в микропроцессорных системах управления, но и в системах обработки информации с ЭВМ, в вычислительных системах. К ним относятся стандартные для вычислительных систем устройства ввода информации (клавишные устройства, телетайп, системы ввода с перфолент, магнитных лент и дисков), устройства вывода информации в виде печатающих устройств (телетайп, электрические печатающие машинки — ЭПМ), АЦПУ, последовательные построчные печатающие устройства (ПППУ), устройства отображения информации (дисплеи на ЭЛТ, цифровые семисегментные световые индикаторы). Специализированные устройства характерны в основном для
39

АСУ ТП, так как включают в себя устройства связи МП с технологическими объектами управления и оперативным персоналом.
Рисунок 1 – Состав периферийных устройств МП-системы
Основные типы периферийных устройств. В состав современных ЭВМ входят многочисленные и разнообразные по выполняемым функциям, принципам действия и характеристикам периферийные устройства, которые по назначению можно разделить на две группы:
1)внешние запоминающие устройства, предназначенные для хранения больших объемов информации;
2)устройства ввода-вывода, обеспечивающие связь машины с внешней средой путем ввода и вывода информации из ЭВМ, ее регистрации и отображения.
Устройство ввода позволяет вводить в машину данные и программы. Устройства вывода служат для вывода из ЭВМ результатов обработки данных,
втом числе для их регистрации и отображения.
Типы устройств ввода информации:
1)Ручного ввода: клавиатура пульта управления.
2)Полуавтоматического ввода: клавиатура дисплея, ручной манипулятор "мышь", световое перо, сканер, планшет, джойстик, устройство ввода с перфолент, устройство ввода с магнитных носителей.
3)Автоматического ввода: читающие автоматы, речевые анализаторы, устройства ввода с каналов связи, аналого-цифровой преобразователи, телетайпы.
Типы устройств вывода информации:
1)Устройства фиксации на машинных носителях: перфораторы, устройства записи на магнитные носители.
2)Устройства регистрации: знакогенерирующие (АЦПУ) и графические (графопостроители).
3)Устройства наглядного отображения: дисплеи и индикаторы.
4) Устройства передачи: кодирующие устройства, цифро-аналоговые преобразователи, модемы, телетайпы.
Основные характеристики внешних запоминающих устройств. Одной из основных характеристик ВЗУ является общий объем хранимой информации, или емкость ВЗУ, обычно измеряемая в байтах. Из-за большого различия быстродействия оперативной памяти и ВЗУ обращения к внешней памяти вызывают потери производительности ЭВМ. Поэтому быстродействие ВЗУ
40