2.6. Определение угловых скоростей и угловых ускорений
Используя планы скоростей и ускорений, определяем угловые скорости и угловые ускорения звена 2 по формулам

Величины 2 ω и 2 ε для всех положений заносим в табл. 2, присвоив знак плюс, если они направлены по вращению кривошипа, и знак минус, если в противоположную сторону.
Таблица 2.
|
№ Полож. |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1,8 |
0,68 |
13,96 |
0,93 |
0,41 |
1,35 |
2,7 |
7,3 |
2,01 |
1,28 |
1,15 |
|
2 |
1,64 |
2,16 |
11,55 |
0,57 |
5,31 |
0,54 |
12 |
2,85 |
1,73 |
0,78 |
0,66 |
|
3 |
0,47 |
1,87 |
6,86 |
0,88 |
10,57 |
2,17 |
20,9 |
1,09 |
1,29 |
0,6 |
1,65 |
|
4 |
1,05 |
0,57 |
4,69 |
1,48 |
7,53 |
1,94 |
15,6 |
10,68 |
1,94 |
1 |
1,7 |
|
5 |
1,64 |
0 |
11,32 |
2,58 |
0 |
0,21 |
0,67 |
10,06 |
2,8 |
1,76 |
1,77 |
|
6 |
1,32 |
0,62 |
7,23 |
1,93 |
8,17 |
2,31 |
2,68 |
14,18 |
2,48 |
1,31 |
2,1 |
|
7 |
0,7 |
2,21 |
1,92 |
2,08 |
4,83 |
1,57 |
16,28 |
15,87 |
2,26 |
1,42 |
1,82 |


 мм
мм
 мм
мм





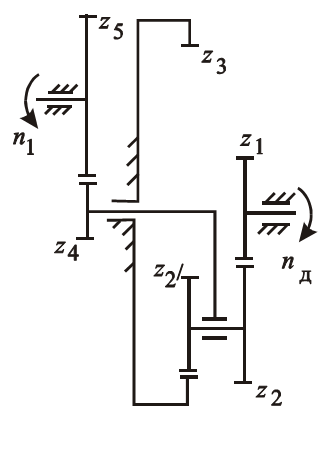
3. Анализ и синтез зубчатого механизма
3.1. Кинематическая схема зубчатой передачи
Исходные
данные:

3.2. Общее передаточное отношение зубчатой передачи
Определим
общее передаточное отношение зубчатой
передачи и число зубьев
 .
.

 ;
;
 ,
,
Где
 - передаточное отношение планетарного
механизма;
- передаточное отношение планетарного
механизма;
 ;
; , отсюда
, отсюда
 ,
округляем до целого Z5
=
27.
,
округляем до целого Z5
=
27.
Проверим для планетарной передачи условия:
• соосности: m (Z1 + Z2) = m (Z3 - Z2’),
18 + 48 = 87 – 21 66 = 66;
• соседства
 ;
;
где
k
= 3 – число блоков сателлитов (задается);
 – коэффициент высоты головки зуба
– коэффициент высоты головки зуба
(18
+ 48)
 21+2, 57 > 23;
21+2, 57 > 23;
• сборки:
где Q – любое целое число; L – наименьший общий делитель чисел Z2 и Z2’ , в нашем случае
L = 3
 =
138
=
138
3.3 Синтез зубчатого зацепления
Зубчатое зацепление состоит из колес Z4 = 13; Z5 = 27, m=5. Считаем, что зубчатые колеса – прямозубые эвольвентные цилиндрические, нарезанные стандартным реечным инструментом.
3.3.1. Определяем:
• коэффициенты смещения реечного инструмента из условия устранения подреза:
для колеса Z4 = 13

для колеса Z5 = 27

• угол эксплуатационного зацепления w

По
значению

• коэффициент воспринимаемого смещения

• коэффициент уравнительного смешения

• радиальный зазор

(с* =0,25 – коэффициент радиального зазора);
• межосевое расстояние

• радиусы делительных окружностей

• радиусы
основных окружностей 


• радиусы начальных окружностей


(проверка:


• радиусы окружностей впадин;


где

• радиусы окружностей вершин


Проверка

38,15 + 61,25+1,25 = 71,975 + 27,425 + 1,25 = 100,65
• толщина зубьев по делительной окружности

• шаг зацепления по делительной окружности
Р = π m = π 5 = 15,7 мм.
3.3.2 На листе 3 представлена картина зацепления в масштабе 5:1.
На
линии зацепления показана активная
часть линии зацепления (b).
3.3.3 Расчет значений коэффициентов относительного удельного скольжения зубьев произведен по формулам:

где


соответственно;

результаты расчетов сведены в табл. 2
Таблица 2.
|
|
0 |
10,6 |
52,2 |
107,71 |
161,36 |
|
|
-∞ |
-5,83 |
0 |
0,769 |
1,0 |
|
|
1,0 |
0,853 |
0 |
-3,19 |
-∞ |



По
полученным значениям
 построены графики изменения
построены графики изменения .
.
3.3.4 Коэффициент перекрытия