


3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
3.3.Моделирование механических режимов
3.3.1.Модельмеханическихпроцессовпечатногоузла
3.3.1.1.Особенностиконструктивногопостроения печатныхузлов
Вкачестве наиболее типичных признаков печатных узлов, подвергающихся механическим воздействиям, можно выделить следующие:
1. Форма печатной платы, на основе которой реализуются ПУ, может иметь сложную конфигурацию.
2. Материалом ПП является стеклотекстолит, который обладает ярко выраженными диссипативными свойствами. При механических воздействиях используется также базовая несущая конструкция 2-го уровня – функцио-
нальная ячейка 17 , представляющая собой сложную структуру – основание из алюминиевого сплава с установленными на его поверхностях многослойными печатными платами.
3.На ПП располагается, как правило, большое количество сосредоточенных масс (ЭРЭ, ребра жесткости, радиаторы и т. п.) с массой от долей грамма до нескольких сотен граммов. При этом массы располагаются на плоскости ПП случайным образом.
4.ПП крепится в приборах, как правило, при помощи винтов. При этом крепление может быть как точечным, так и в виде зон (обычно представляющих собой защемления).
5.Внешние механические воздействия передаются на ПУ через элементы крепления ПП.
Стеклотекстолит является основой для изготовления ПП, подвергающихся интенсивным механическим воздействиям, и представляет собой структуру из нескольких слоев стекловолокна, уложенных во взаимно перпендикулярных направлениях и пропитанных полимеризующейся смолой.
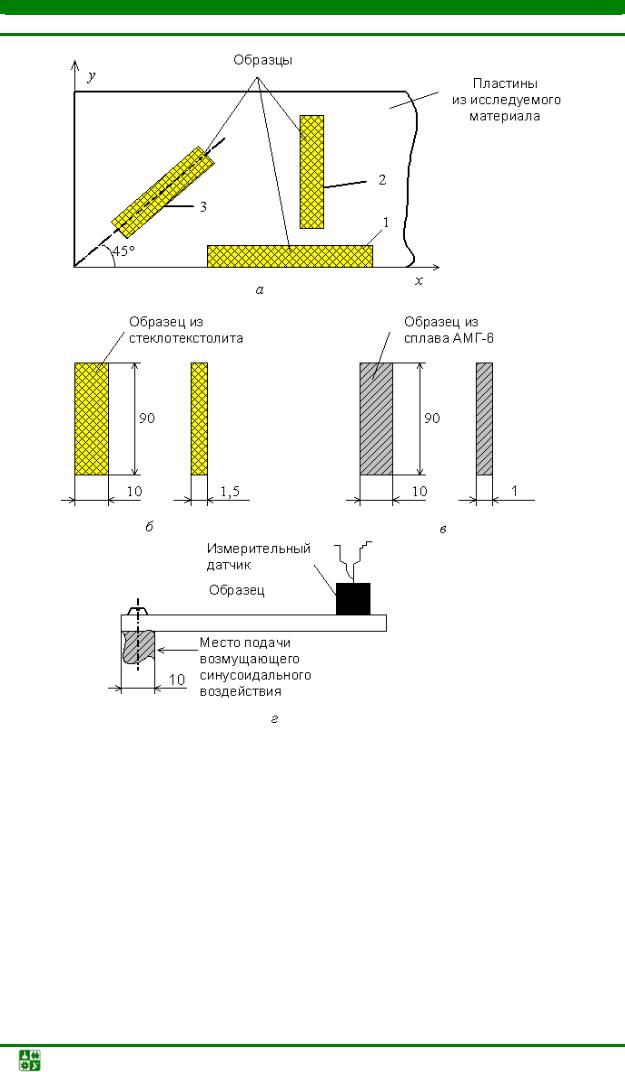
Всвязи с такой структурой стеклотекстолит обладает анизотропными свойствами. Так, на рис. 3.48, а приведен эскиз раскройки пластины из стеклотекстолита и из сплава АМГ-6. На рис. 3.48, б, в представлены размеры образцов, полученных в результате раскройки, а на рис. 3.48, г приведен эскиз схемы их испытания.
Врезультате испытаний для каждого образца была получена зависимость виброускорения от воздействующей частоты синусоидального воздей-
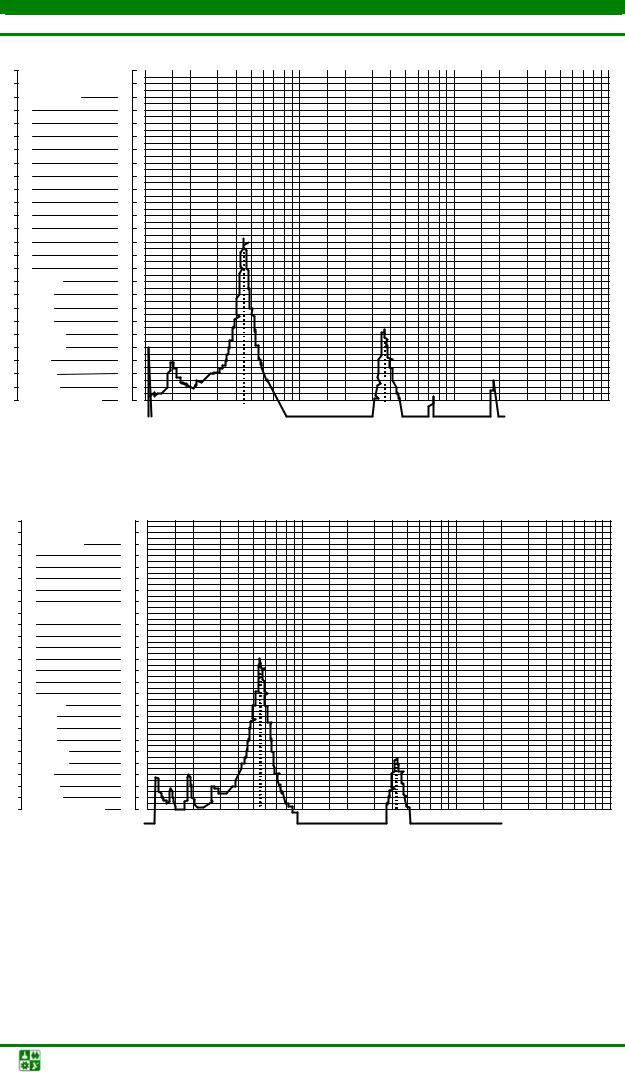
ствия (амплитудно-частотная характеристика АЧХ). Полученные АЧХ приведены на рис. 3.49. Как видно из рис. 3.49, а–в, жесткостные свойства стеклотекстолита в направлении под углом 45° отличаются от его жесткостных свойств в продольном и поперечном направлениях. Это объясняется от-
личием, примерно на 20 , первых (f01) и вторых (f02) резонансных частот исследуемых образцов. В то же время жесткостные свойства сплава АМГ-6 можно считать одинаковыми в различных направлениях, что объясняется практически идентичными АЧХ (см. рис. 3.49, г, д).
С учетом вышеизложенного механические характеристики печатных плат, подвергающихся интенсивным механическим воздействиям, можно задавать набором следующих параметров:
Компьютерные технологии в приборостроении. Учеб. пособие |
-156- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Е1 – модульупругостиобразцаматериалаППприизгибепооси0x или0y;
Е45 – модуль упругости образца материала ПП, вырезанного под углом в 45° к основе (см. рис. 3.49, а);
1, 45 – коэффициенты Пуассона при деформации осей 0x или 0y и под углом в 45° к основе;
– плотность материала ПП;
– коэффициент рассеивания энергии в материале при вибрационной деформации.
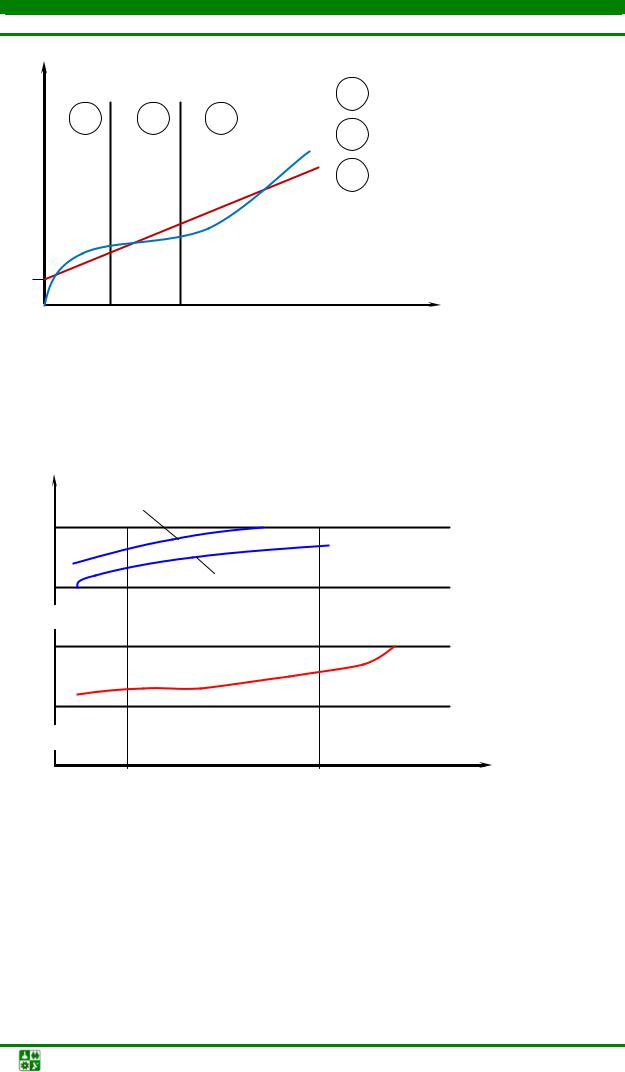
Коэффициент рассеивания энергии в материале 2, 11 при вибрационных воздействиях имеет сложную зависимость от параметров, являющихся следствием внешних механических воздействий, от величины механических напряжений в материале, частоты вибрационных воздействий и температуры материала.
Зависимость от величины механических напряжений в материале
приведена на рис. 3.50, зависимость от температуры – на рис. 3.51.
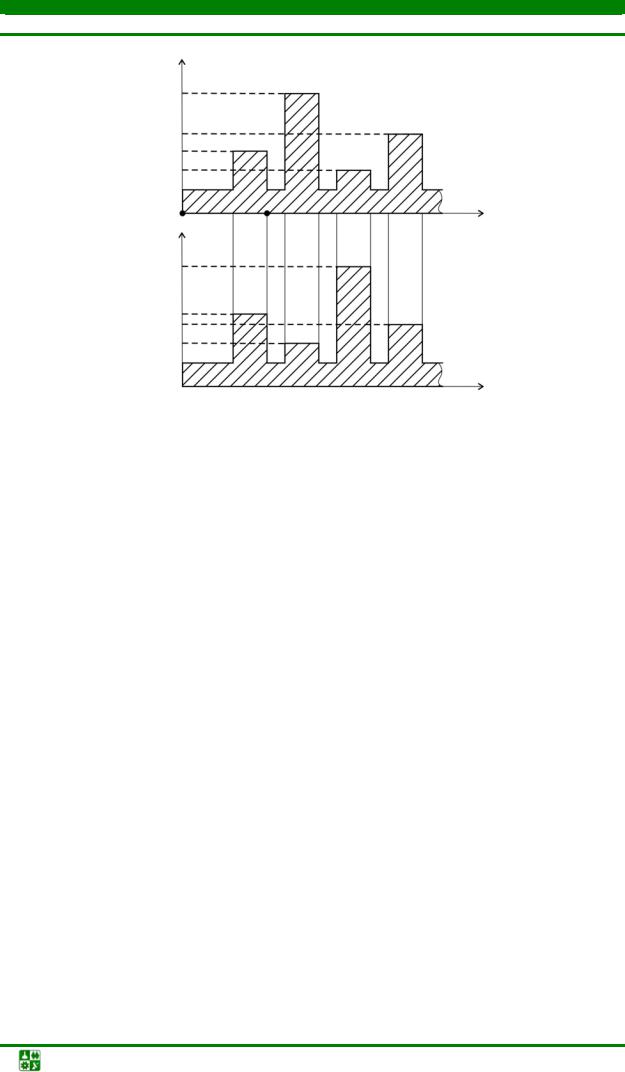
В целом конструкцию ПУ можно охарактеризовать как анизотропную пластину, усиленную локально размещенными на ней ЭРЭ, ребрами жесткости и т. п., вносящими также и дополнительную массу. На рис. 3.52 приведен пример изменения цилиндрической жесткости удельной массовой нагрузки по сечению конструкции ПУ. Если в конструкции ПУ выделить участок со ступенчато изменяющейся жесткостью, например, участок 0–1 на рис. 3.52, то этот участок будет представлять собой при изгибе в плоскости сечения последовательное соединение двух меньших участков с различными цилиндрическими жесткостями или балку со ступенчато изменяющейся жесткостью.
Компьютерные технологии в приборостроении. Учеб. пособие |
-157- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Рис. 3.48. Эскиз раскройки пластины из исследуемого материала:
а – образцы, вырезанные: 1 – в продольном направлении; 2 – в поперечном направлении; 3 – в направлении под 45°; б, в – размеры образцов; г – эскиз крепления исследуемого образца и датчика
Компьютерные технологии в приборостроении. Учеб. пособие |
-158- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
|
Bruel&Kjcer |
|
|
Bruel&Kjcer |
Bruel&Kjcer |
10 |
75 |
50 |
25 |
|
|
|
|
Measuring Object:
db |
db |
|
db db |
|
|
|
|
|
|
|
|
|
|
8 |
60 |
Стекло- |
40 20 |
|
|
|
|
|
|
|
|
|
|
текстолит, |
|
|
|
|
|
|
|
|
|
||||
|
|
толщина1.5 мм |
|
|
|
|
|
|
|
|
|
|
|
6 |
45 |
|
30 |
15 |
|
|
|
|
|
|
|
|
|
|
|
Напр. под |
|
|
|
|
|
|
|
|
|
|
|
|
|
углом 450 |
|
|
|
|
|
|
|
|
|
|
|
4 |
30 |
1х9 см |
20 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
0 0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
||
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
f01 = 43 Гц |
|
|
f02 = 350 Гц |
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
10 |
75 |
Bruel&Kjcer |
50 |
25 |
|
Bruel&Kjcer |
|
|
Bruel&Kjcer |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
||
db |
|
|
|
|
|
|
|
|
|
|
|||
8 |
60 |
Стекло - |
40 |
20 |
|
|
|
|
|
|
|
|
|
|
|
текстолит, |
|
|
|
|
|
|
|
|
|
|
|
|
толщина 1.5 мм |
|
|
|
|
|
|
|
|
|
|
||
6 |
45 |
|
30 |
15 |
|
|
|
|
|
|
|
|
|
|
|
Поперечн. |
|
|
|
|
|
|
|
|
|
|
|
|
|
напр. |
|
|
|
|
|
|
|
|
|
|
|
|
|
1х9 см |
|
|
|
|
|
|
|
|
|
|
|
4 |
30 |
|
20 |
10 |
|
|
|
|
|
|
|
|
|
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
2 |
15 |
Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
f01 = 55 Гц |
|
f02 = 420 Гц |
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
Рис. 3.49. Результаты испытаний различных образцов из стеклотекстолита (а–в) |
|
||||||||||
|
|
и из сплава АМГ-6 (г, д), а также калибровочная характеристика (е) |
|
|
|||||||||
|
|
Компьютерные технологии в приборостроении. Учеб. пособие |
|
-159- |
|||||||||

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
10 |
75 |
Bruel&Kjcer |
50 |
25 |
|
|
Bruel&Kjcer |
|
|
|
Bruel&Kjcer |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
|||
db |
|
|
|
|
|
|
|
|
|
|
|
|||
8 |
60 |
|
Стекло - |
40 |
20 |
|
|
|
|
|
|
|
|
|
|
|
текстолит, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
толщина 1.5мм |
|
|
|
|
|
|
|
|
|
|
||
6 |
45 |
|
|
30 |
15 |
|
|
|
|
|
|
|
|
|
|
|
Продольн. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
напр. |
|
|
|
|
|
|
|
|
|
|
|
4 |
30 |
|
1х9 см |
20 |
10 |
|
|
|
|
|
|
|
|
|
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
15 |
Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
||
0 0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
1000 |
|||
|
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
|
f01 = 52 Гц |
|
f02 = 420 Гц |
|
|
|
||
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
10 |
75 |
Bruel&Kjcer |
50 |
25 |
|
Bruel&Kjcer |
|
|
|
Bruel&Kjcer |
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
||
db |
|
|
|
|
|
|
|
|
|
|
|||
8 |
60 |
АМГ- 6, |
40 |
20 |
|
|
|
|
|
|
|
|
|
|
|
толщина 1мм |
|
|
|
|
|
|
|
|
|
|
|
6 |
45 |
Напр. под |
30 |
15 |
|
|
|
|
|
|
|
|
|
|
|
углом450 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1х9см |
|
|
|
|
|
|
|
|
|
|
|
4 |
30 |
Rec. No.: |
20 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
2 |
15 |
Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
f01 |
|
|
f02 |
|
|
|
|
г
Рис. 3.49. Продолжение
Компьютерные технологии в приборостроении. Учеб. пособие |
-160- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
10 |
75 |
Bruel&Kjcer |
50 |
25 |
Bruel&Kjcer |
Bruel&Kjcer |
||
|
|
|
|
|||||
|
Measuring Object: |
|
|
|
|
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
db |
db |
|
|
|
db db |
|
|
|
|
|
|
|
|||||
8 |
60 |
|
|
|
40 |
20 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|||||
АМГ- 6 , |
|
|
|
|||||
|
|
|
|
|
|
|
||
толщина1мм
6 |
45 |
Продольн. |
30 15 |
|
|
|
|
|
|
|
|
|
|
|
|
напр. |
|
|
|
|
|
|
|
|
|
|
|
|
|
1х9 см |
|
|
|
|
|
|
|
|
|
|
|
4 |
30 |
|
20 10 |
|
|
|
|
|
|
|
|
|
|
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
20 |
f5001 |
100 |
200 |
f02500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
10 |
75 |
Bruel&Kjcer |
50 25 |
|
Bruel&Kjcer |
|
|
|
Bruel&Kjcer |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
||
db |
|
|
|
|
|
|
|
|
|
|
|||
8 |
60 |
|
40 20 |
|
|
|
|
|
|
|
|
|
|
6 |
45 |
|
30 15 |
|
|
Калибровка |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
4 |
30 |
|
20 10 |
|
|
|
|
10g |
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
||
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
7g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Rect.: |
|
|
|
|
5g |
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
3g |
|
|
|
|
|
|
||
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
||
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
||
|
Wr. Sp.: |
|
|
|
1g |
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.49. Окончание |
|
|
|
|
||
Компьютерные технологии в приборостроении. Учеб. пособие |
-161- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
|
|
1 |
– Малый уровень напряжений |
1 |
2 |
3 |
– Средний уровень напряжений |
|
|
2 |
|
|
|
3 |
– Большой уровень напряжений |
0
0 |
0,2 |
0,4 |
|
|
|
|
|
0,6 |
0,8 |
||||||
|
|
|
|
|
|
|
р |
Рис. 3.50. Зависимость от механического напряжения:
– механическое напряжение; р – разрушающее механическое напряжение
Ψ1,2 107 Н/ м2
50,0
1,2 107 Н/ м2 |
Стеклотекстолит |
5,0
≈
1,2
Алюминиевый сплав АМГ-6
0,5
≈
0 |
|
|
|
|
|
|
|
|
|
|
|
|
Т, °С |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
|
|||||
Рис. 3.51. Зависимость некоторых конструкционных материалов ПС от температуры материалов
Компьютерные технологии в приборостроении. Учеб. пособие |
-162- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
y |
|
D |
|
|
|
D2 |
|
|
|
|
|
|
|
|
D4 |
|
|
|
D1 |
|
|
|
D3 |
|
Dпп |
|
|
|
0 |
|
x |
y |
m |
1 |
|
|
|
||
|
|
m3 |
|
|
|
|
m1 |
m4 |
|
|
|
m2 |
mпп |
|
|
x |
Рис. 3.52. Характерное распределение жесткостей и масс по сечению печатных узлов: Dпп, D1–D4 – жесткости ПП и ЭРЭ; mпп, m1–m4 – удельные
массовые нагрузки ПП и ЭРЭ
3.3.1.2. Параметрывибрационныхвоздействий
Вибрационные воздействия на ПС можно классифицировать на гармонические (детерминированные), полигармонические и случайные [17].
Гармоническое воздействие является периодическим колебательным процессом, который характеризуется амплитудой Хm и периодом
Тколебаний. При этом мгновенное значение перемещения в момент времени
τопределяется как
X = X m sin 2 pt/T + j = X m sin + j , |
(3.49) |
где = 2 /Т – круговая частота, – фаза гармонического колебания. Амплитуда ускорения при гармоническом воздействии вычисляется
как
A |
2 X |
m |
. |
(3.50) |
m |
|
|
|
Полигармоническое вибрационное воздействие является воздействием, которое может быть представлено в виде суммы нескольких гармонических воздействий:
X = M Xmi sin( i + ji ),
i=1
где Хmi, i, i – амплитуда, круговая частота и начальная фаза i-го гармонического колебания; М – количество гармонических составляющих.
Компьютерные технологии в приборостроении. Учеб. пособие |
-163- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Гармонические воздействия, как правило, возникают на объектах установки ПС, в которых имеются различные одиночные мощные вращающиеся механизмы (электродвигатели, турбинные двигатели и т. п.). Возникновение полигармонических воздействий характерно при наличии на объекте установки ПС нескольких разных по количеству оборотов механических устройств.
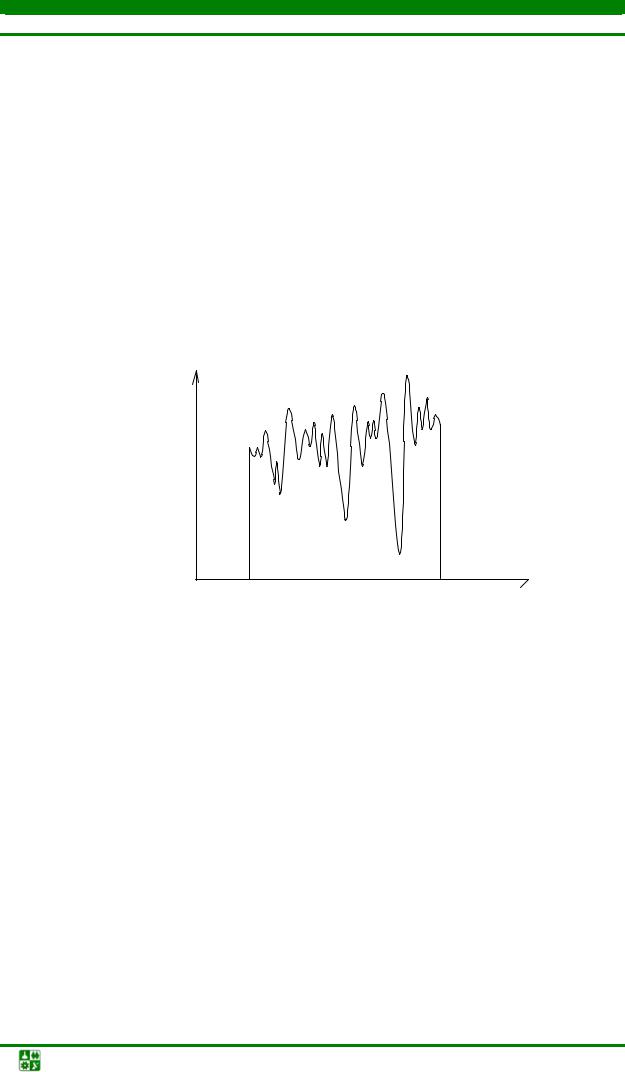
Обычно, в реальных условиях эксплуатации ПС, вибрационные воздействия носят случайный характер, т. е. случайная вибрация может рассматриваться как некий случайный процесс. Так, на рис. 3.53 приведен пример реализации случайного процесса – зависимость мгновенных значений случайной величины х от времени на временном интервале τ1–τ2. Сочетанием случайного процесса называют множество значений его реализации в некоторый момент времени.
x
 τ
τ
τ1 τ2
Рис. 3.53. Примерреализациислучайногопроцесса
Случайные процессы можно разделить на две группы: 1-я группа – стационарные (характеристики не зависят от начала отсчета); 2-я группа – нестационарные (характеристики зависят от начала отсчета).
Стационарный случайный процесс характеризуется тем, что каждая его реализация обладает одинаковыми характеристиками, в то время как реализации нестационарного процесса могут не обладать одинаковыми характеристиками.
При описании случайного вибрационного воздействия каждое его сечение характеризуется как случайная величина и описывается с помощью функции распределения, плотности вероятности и спектральной плотности. При этом также используют такие числовые характеристики, как математическое ожидание случайной величины (СВ), дисперсия СВ, среднеквадратическое отклонение СВ и корреляционный момент.
Средняя величина считается определенной, если известно, с какой вероятностью возможно появление какого-либо ее значения, что отражается законом распределения СВ.
Компьютерные технологии в приборостроении. Учеб. пособие |
-164- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
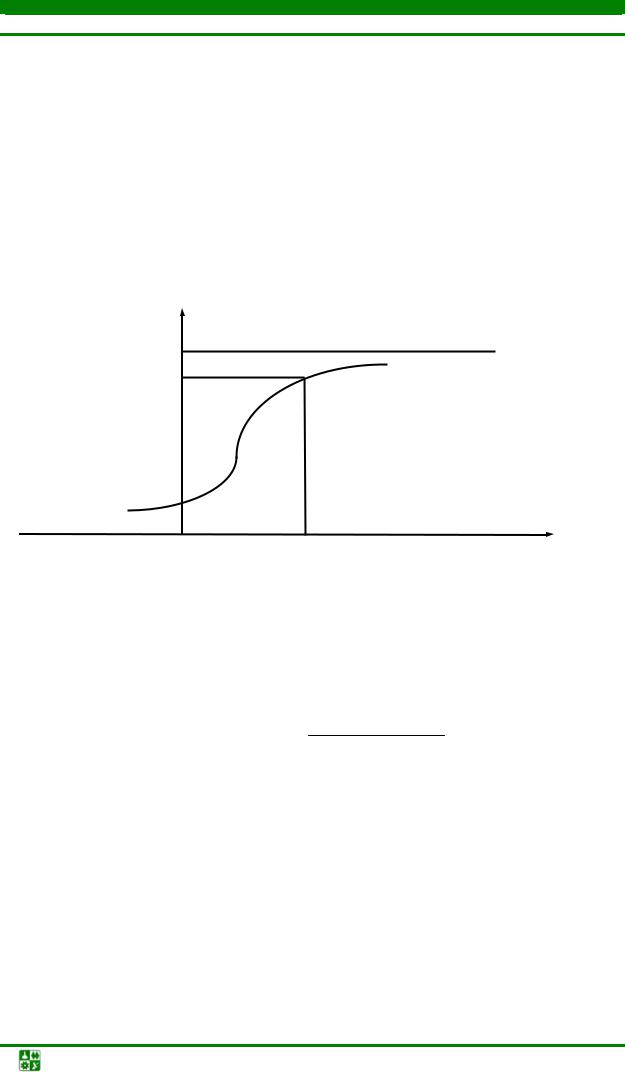
Для непрерывной СВ функция, выражающая вероятность Р того, что ее значение F(х) будет меньше текущей переменной х, называется функцией распределения:
F(х) = Р(Х < х).
Причем функция удовлетворяет условию
0 F(х) 1.
На рис. 3.54 приведен пример функции распределения.
F(x)
1
P(X–x)
X
x
Рис. 3.54. Примерфункции распределения для СВ Х
Для определения вероятности Р появления значения СВ Х внутри интервала (х, х+ х) используют еще одну вероятностную характеристику для непрерывной СВ – плотность вероятности (рис. 3.54):
f (x) lim P(x X x x) .
x 0 x
Из приведенного выражения видно, что вероятность нахождения СВ Х
в интервале (х1, х2) будет равна:
P x1 |
|
X |
|
X x2 |
= 2 |
f x dx. |
|
|
|
X1 |
|
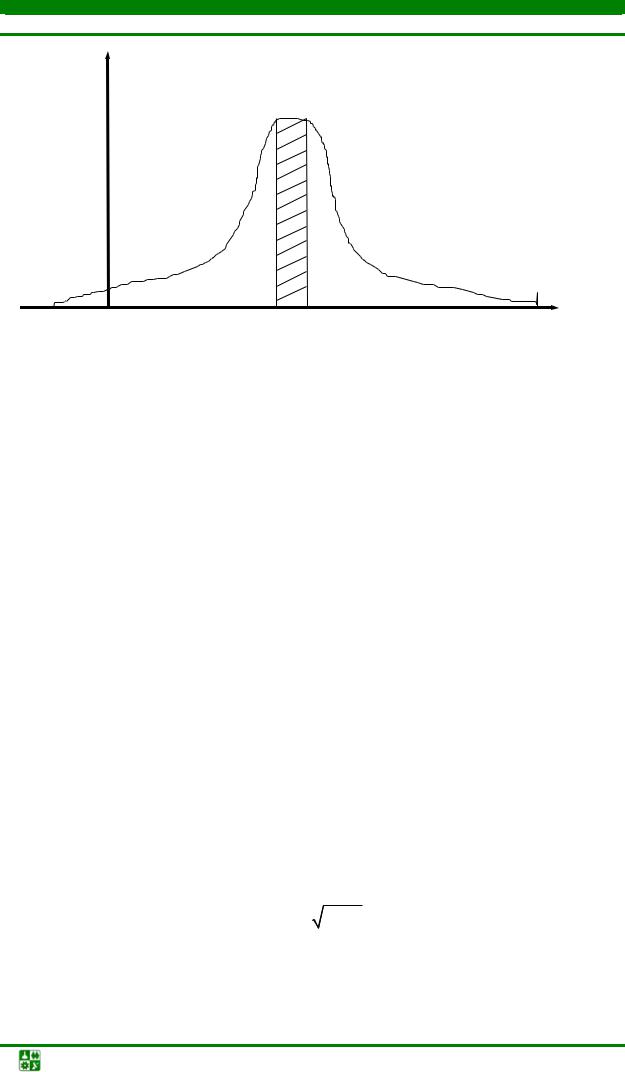
Значение Р(х1 Х х2) численно равно заштрихованной площади на рис. 3.55.
Компьютерные технологии в приборостроении. Учеб. пособие |
-165- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
(x)
x
x1 x2
Рис. 3.55. Пример графика плотности вероятности
На практике функция распределения не всегда известна, поэтому используют такие числовые характеристики СВ, как математическое ожидание m(х) и дисперсию D(х), которые могут изменяться во времени.
Значение m(х) случайного процесса вычисляется для каждого его сече-
ния t:
m(x) = lim |
N |
x p = |
+ |
x f (x)dx, |
|
|
|
||||
N |
i i |
|
|||
|
i=1 |
|
|
|
где i – номер опыта по определению значения СВ в момент τ; хi – значение случайного процесса в i-м опыте в момент τ; Рi – вероятность появления хi; N – число опытов.
Дисперсия случайного процесса в момент t определяется как
+
D(x) = x m(x) 2 f (x)dx.
D(х) по своему физическому смыслу представляет мощность переменных составляющих случайного колебания.
На практике также часто используют понятие среднего квадратичного отклонения СВ:
(x) = D(x).
Вычисление корреляционного момента x, y), характеризующего зависимость между случайными величинами х и у, осуществляется в соответствии со следующим выражением:
Компьютерные технологии в приборостроении. Учеб. пособие |
-166- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
+ +
m(x,y) = x m x y m y f (x,y)dxdy.
Для стационарных случайных процессов m(х) = const, D(х) = const,
x, y) = const.
Корреляционная функция Kх(k) устанавливает степень зависимости
между двумя сечениями случайной функции через время и определяется как
KX ( )= m X ( ) m( ) X ( + k) m( + k) ,
где m(τ), m(τ+k) – m(х) в различные моменты времени.
Стационарный случайный колебательный процесс обладает частотным спектром. Однако этот процесс нельзя представить в виде суммы гармонических составляющих с определенной амплитудой и фазой, поскольку реализации случайного процесса одинаковы и изменяются случайным образом. В связи с этим описание спектра случайного колебания удобно производить с точки зрения мощности вибрации, приходящейся на единицу частоты диапазона вибрации. На практике для оценки параметров случайной вибрации используют понятие спектральной плотности ускорения G( :
|
|
|
a |
|
+ |
|
G( )= |
lim |
= KX ( )e j d , |
||
|
D |
||||
|
|
0 |
|
||
где |
– круговая частота; а – среднеквадратическая величина ускорения |
||||
a = |
D(a). |
|
|
|
|
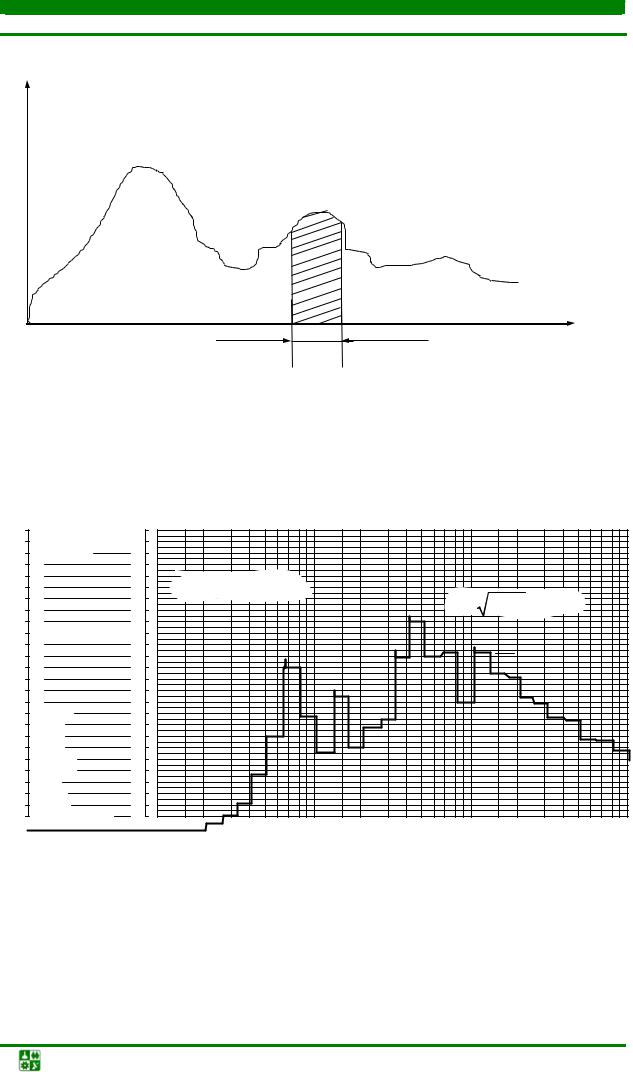
На рис. 3.56 приведен пример графика спектральной плотности. Заштрихованная на графике площадь численно равна величине среднеквадра-
тичного ускорения в диапазоне частоты .
На рис. 3.57 приведен пример частотной характеристики некоторой точки печатной платы при воздействии на нее случайной вибрации.
Гармоническая вибрация, действующая на элементы ПС более опасна, чем случайная при одних и тех же среднеквадратичных ускорениях, так как в этом случае вся мощность вибрации сосредотачивается на одной частоте и при совпадении этой частоты с собственной частотой колебаний конструкции наступает механический резонанс (рис. 3.59).
Компьютерные технологии в приборостроении. Учеб. пособие |
-167- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
G( )
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.56. Пример графика спектральной плотности |
|
|
|
|||||||
|
При проведении испытаний на случайную вибрацию с помощью гар- |
|||||||||||
монической вибрации определяют ее эквивалентные амплитуды на различ- |
||||||||||||
ных частотах. |
|
|
|
|
|
|
|
|
|
|
|
|
10 |
Bruel&Kjcer |
50 |
25 |
|
Bruel&Kjcer |
|
|
|
Bruel&Kjcer |
|
|
|
75 |
|
|
|
|
|
|
|
|
|
|||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
|
db |
|
|
|
|
|
|
|
|
|
|||
8 |
60 |
40 |
20 |
сред. квад = 30g |
|
|
a |
D(a) 30g |
|
|||
|
Входная |
|
|
|
|
|
99.8g |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
вибрация 13.3g |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
6 |
45 |
30 |
15 |
|
|
|
|
|
|
89.0g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
30 |
20 |
10 |
|
|
|
|
|
|
|
|
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
10 |
|||||||||
|
Рис. 3.57. Пример экспериментально полученной частотной характеристики |
|
||||||||||
|
|
(в диапазоне от 20 до 2000 Гц) точки печатной платы |
|
|
||||||||
|
при воздействии случайной вибрации со среднеквадратическим ускорением 30 g |
|
||||||||||
При исследовании механических процессов в ПС наиболее информативной является амплитудно-частотная характеристика отдельных точек кон-
Компьютерные технологии в приборостроении. Учеб. пособие |
-168- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
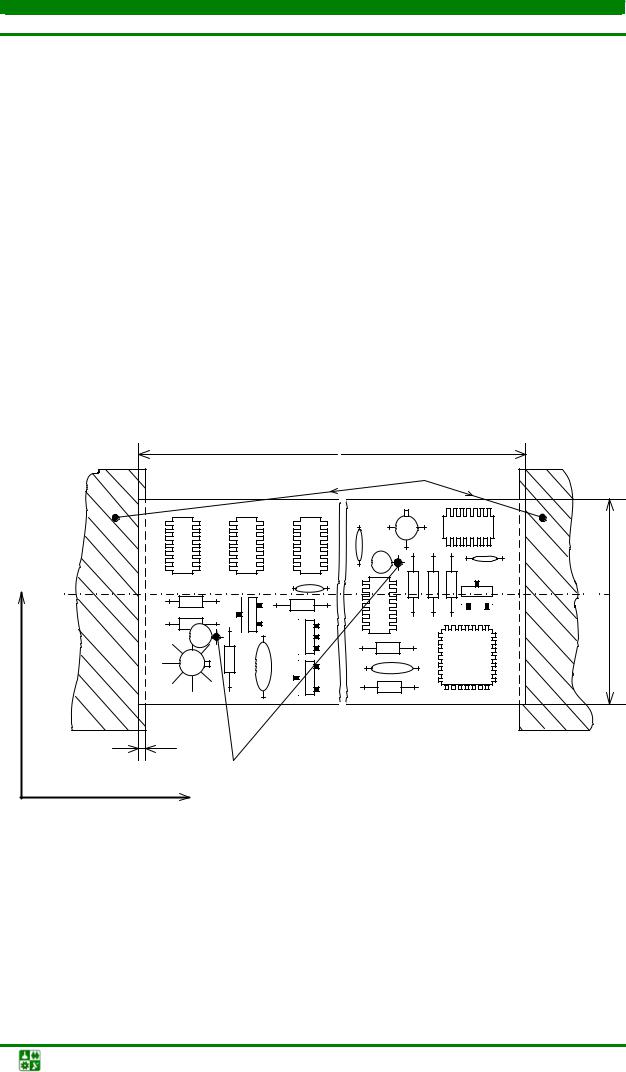
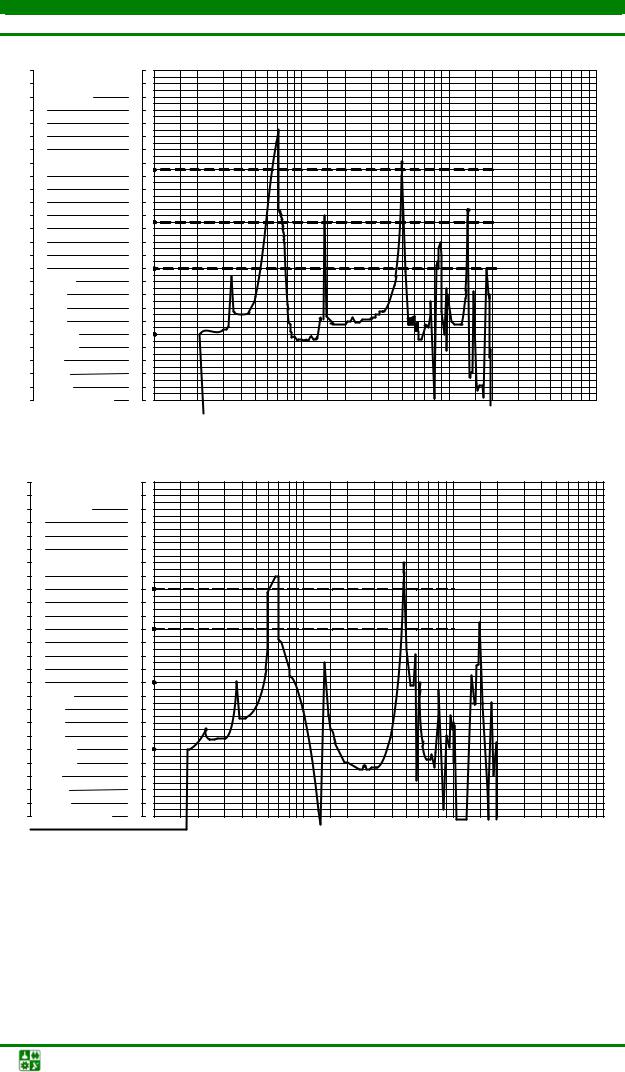
струкции, которая позволяет оценить коэффициенты динамичности (Kd = Аi/Акр, где Аi – виброускорение в i-й точке конструкции или на ЭРЭ; Акр – виброускорение в местах крепления конструкции) и весь спектр резонансных частот во всем частотном диапазоне воздействующей вибрации (рис. 3.49). Имея АЧХ различных участков конструкции и ЭРЭ и управляя параметрами конструкции, разработчик ПС может вывести резонансные частоты в высокочастотный спектр или снизить значения коэффициентов динамичности ЭРЭ. При этом следует учитывать, что некоторые конструкторские решения должны носить локальный характер (например, уменьшения значения Kd для нескольких ЭРЭ), так как частотные характеристики различных участков конструкции имеют индивидуальный характер. Так, например, на рис. 3.58 приведен эскиз конструкции образца функциональной ячейки (металлическое основание толщиной 1,5 мм с установленными на каждую его сторону многослойными печатными платами с ЭРЭ), а на рис. 3.59 – частотные характеристики двух различных точек функциональной ячейки, полученные в результате испытаний.
|
|
|
235 |
|
|
|
|
|
|
|
|
|
Приспособление |
|
|
у |
|
2 |
|
y |
|
|
125 |
|
y |
|
|
|
|
|
|
1 |
|
|
|
5 |
х |
(N1: х = 58 мм, |
y = 62,5; |
|
Контрольные точки |
|||
|
(N : x=58 мм, |
y=62,5 мм; |
||
|
|
хx |
N2: 1х = 174 мм, |
y = 94;) |
|
|
N2: x=174 мм, у=94 мм) |
||
|
Рис. 3.58. Эскиз испытываемого образца функциональной ячейки |
|||
|
|
(общая масса ячейки 240 г) |
|
|
Компьютерные технологии в приборостроении. Учеб. пособие |
-169- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
10 |
75 Bruel&Kjcer |
50 25 |
|
Bruel&Kjcer |
|
|
|
Bruel&Kjcer |
|
|
|||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
||
db |
|
|
|
|
|
|
|
|
|
||||
8 |
60 |
40 20 |
|
|
|
|
|
|
|
|
|
||
|
|
Контрольная |
50g |
|
|
|
|
|
|
|
|
||
|
|
точка №1 |
|
|
|
|
|
|
|
|
|
|
|
6 |
45 |
30 15 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
15g |
|
|
|
|
|
|
|
|
|
4 |
30 |
20 10 10g |
|
|
|
|
|
|
|
|
|||
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
5 3g |
|
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
|
|
|
|
|
|
|
|
|||
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
10 |
75 |
Bruel&Kjcer |
50 25 |
|
Bruel&Kjcer |
|
|
|
Bruel&Kjcer |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
||
db |
|
|
|
|
|
|
|
|
|
|
|||
8 |
60 Контрольная40 20 |
|
|
|
|
|
|
|
|
|
|||
|
|
точка №2 |
|
50g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
6 |
45 |
|
30 15 25g |
|
|
|
|
|
|
|
|
||
4 |
30 |
|
20 10 10g |
|
|
|
|
|
|
|
|
||
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
3g |
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
||
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
б
Рис. 3.59. Результаты испытаний функциональной ячейки при воздействии гармонической вибрации (а, б) и случайной вибрации (в, г)
Компьютерные технологии в приборостроении. Учеб. пособие |
-170- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
10 |
75 Bruel&Kjcer |
50 25 |
Bruel&Kjcer |
Bruel&Kjcer |
||
|
|
|||||
|
Measuring Object: |
|
|
|
||
|
|
|
|
|||
|
|
|
|
|||
db |
db |
|
|
db db |
|
|
|
|
|||||
8 60 Контрольная40 20 точка №1
6 |
45 |
30 15 |
|
a |
D(a) 23,5g |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
83g |
|
|
|
|
|
|
|
|
|
4 |
30 |
20 10 |
|
|
|
|
|
|
|
|
|
||
|
|
Rec. No.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
10 |
75 |
Bruel&Kjcer |
50 |
25 |
|
Bruel&Kjcer |
|
|
Bruel&Kjcer |
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
db |
Measuring Object: |
db db |
|
|
|
|
|
|
|
|
|
||
db |
|
|
|
|
|
|
|
|
|
|
|||
8 |
60Контрольная40 |
20 |
|
a |
D(a) 23,5g |
|
|
|
|
|
|||
|
|
точка №2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
93g |
|
|
|
|
|
|
|
|
|
6 |
45 |
|
30 |
15 |
|
|
|
|
|
|
|
|
|
4 |
30 |
Rec. No.: |
20 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dote: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sign.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rect.: |
|
|
|
|
|
|
|
|
|
|
|
2 |
15 Zero Lev.: |
10 |
5 |
|
|
|
|
|
|
|
|
|
|
|
L. Lim. Fr.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pot.: |
|
|
|
|
|
|
|
|
|
|
|
|
Wr. Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
|
Paper Sp.: |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 Multiply Freq. Scale by.: |
0 |
0 |
20 |
50 |
100 |
200 |
500 |
1000 |
2000 |
5000 |
10000 |
|
|
|
|
|
10 |
|||||||||
г
Рис. 3.59. Окончание
3.3.1.3. Построениерасчетноймодели
Разработку механической модели ПУ будем осуществлять на основе бигармонического дифференциального уравнения вынужденных колебаний ортотропной пластины [11] в абсолютных перемещениях w, но с введенным комплексным модулем упругости (модуль Юнга), который позволяет учесть диссипативные свойства материалов печатных плат. Данное уравнение по-
Компьютерные технологии в приборостроении. Учеб. пособие |
-171- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
зволяет с достаточной для инженерных расчетов точностью описывать процессы, протекающие в печатных узлах ПС при вибрационных нагрузках.
Учитывая также особенности стеклотекстолитов (см. рис. 3.48 и 3.49), бигармоническое уравнение будет иметь следующий вид:
|
|
|
4wi |
2 |
|
|
4wi |
|
|
|
4wi |
|
dwi |
s |
d 2wi |
0, |
(3.51) |
|
D |
D |
D |
||||||||||||||||
|
|
|
XY x2 y2 |
|
|
|
||||||||||||
|
|
X x4 |
|
Y y4 |
b d |
|
d 2 |
|
||||||||||
где wi – перемещение пластины в i-й точке; DX , DY – динамические жесткости при изгибе по осям 0х и 0у:
|
|
|
|
|
|
|
|
|
|
|
s3 |
|
|
|
|
|
|
|
s3 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
DX |
|
|
|
|
|
|
DXY DX 1 2DK , |
|||||||||||||||||||
|
|
|
|
|
|
12(1 2 ) , |
DY 12(1 2 ) , |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
45 |
|
|
|
|
|
|
|
|
|
Gs3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
– жесткость при |
кручении; |
|
|
|
|
|
|
|
E |
– модуль сдвига; b – |
||||||||||||||||||
DK |
|
|
G |
|
|
|||||||||||||||||||||||||||
12 |
|
|
|
45 ) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2(1 |
|
|
|
|
|
|
||||||||||||
вязкость и плотность воздуха; – плотность материала пластины; s – толщина пластины.
Для учета потерь на внутреннее трение в материале печатной платы воспользуемся методом, предложенным Е. С. Сорокиным, суть которого заключается в представлении модуля упругости в комплексном виде:
|
|
E(1 j |
|
), |
(3.52) |
|
E |
||||||
|
|
|||||
|
|
|
2 |
|
||
где E – динамический модуль упругости; Е – статический модуль упруго-
сти; – коэффициент рассеивания энергии в материале ПП. Представление модуля Юнга согласно (3.52) позволяет учесть то, что
относительная деформация отстает по фазе от механического напряжения
Е , что соответствует реальному поведению стеклотекстолитов, из которых выполняются печатные платы.
Учитывая вышеизложенное, в уравнении (3.51) модуль Юнга будет вычисляться согласно (3.52):
|
|
|
E (1 j |
|
) ; |
|
|
|
E (1 j |
|
). |
|
E |
E |
|||||||||||
|
|
|
|
|||||||||
1 |
1 |
2 |
45 |
45 |
2 |
|||||||
|
|
|
|
|
|
|
|
|||||
Для построения расчетной модели воспользуемся топологическим видом моделей и конечно-разностной аппроксимацией исходного уравнения (3.51), в котором можно пренебречь аэродинамической составляющей
b dd i . Для этого рассмотрим основные положения метода конечных разностей (МКР) применительно к классу рассматриваемых нами задач.
Компьютерные технологии в приборостроении. Учеб. пособие |
-172- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Дискретизациянепрерывнойобласти
Применение МКР 15; 17 заключается в замене бесконечно малых приращений дифференциального исчисления конечными приращениями исчисления конечных разностей.
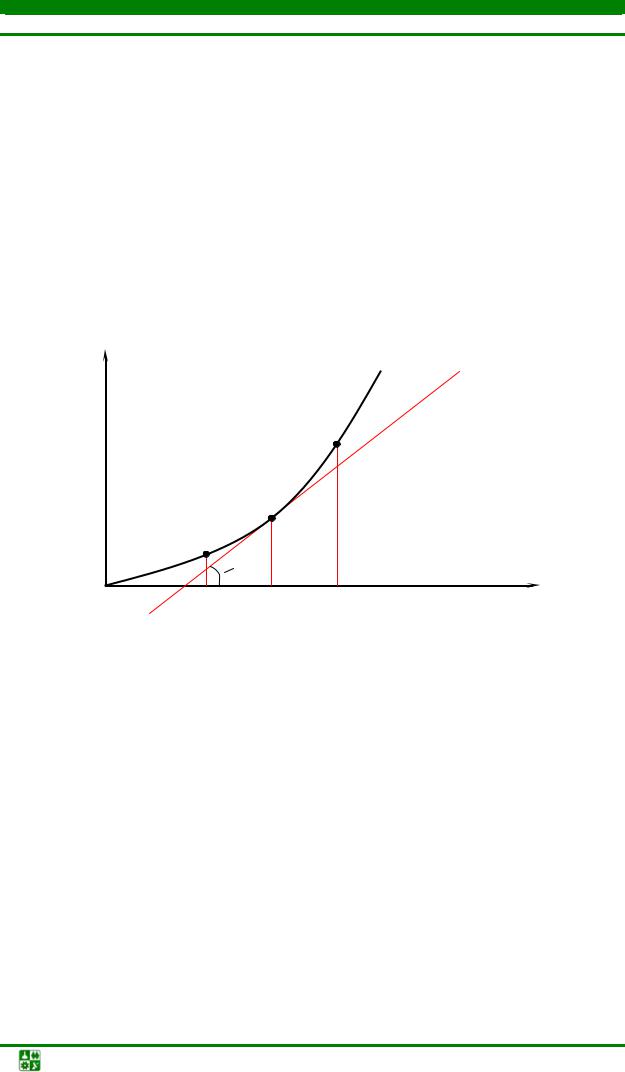
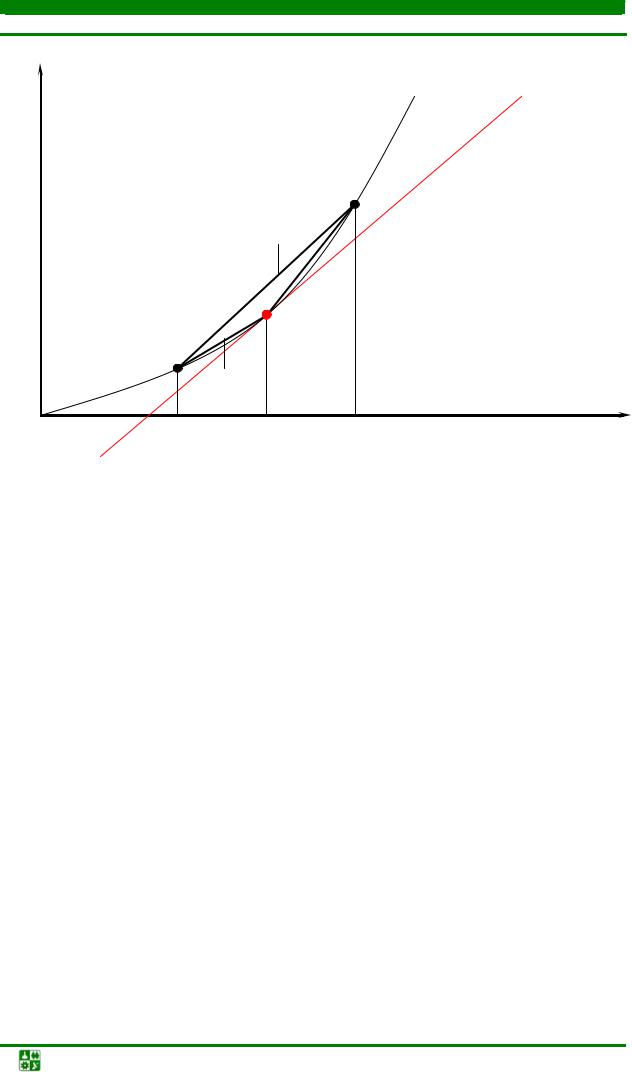
Пусть дана функция y, которая представлена в виде ряда ее значений хm–k, …, хm–1, хm, хm+1, …, как это показано на рис. 3.60.
Первая производная функции у в точке хm на рис. 3.60 есть тангенс угла
наклона касательной в этой точке (tg ). Так как функция представлена значениями в точках хm–1, хm, хm+1, то касательная имеет значение функции в одной точке касания (в точке хm), а остальные точки касательной не определены. В связи с этим касательную при дискретном задании функции необходимо заменить одной из трех хорд, почти параллельной касательной (рис. 3.61).
y
|
|
ym 1 |
|
|
ym |
|
|
ym 1 |
|
|
|
|
α |
x |
|
xm 1 |
xm |
||
xm 1 |
Рис. 3.60. Представление исследуемой функции в МКР
Как показано на рис. 3.61, хорды однозначно ориентированы в координатах, следовательно, для любой из них может быть определен тангенс угла наклона:
|
|
ym+1 |
ym 1 |
|
|
||||
y (x)= tg |
|
|
|
|
|
|
– центральная разность; |
||
x |
|
|
x |
|
|
||||
|
|
m+1 |
m 1 |
|
|
||||
|
|
|
ym 1 ym |
|
|||||
y |
(x)= tg |
|
|
|
|
– разность назад; |
|||
x |
x |
|
|||||||
|
|
|
|
|
m 1 |
|
m |
|
|
|
|
|
|
|
ym+1 ym |
|
|
||
y (x)= tg |
|
|
|
|
– разность вперед. |
||||
x |
x |
|
|||||||
|
|
|
|
|
m+1 |
|
m |
|
|
Компьютерные технологии в приборостроении. Учеб. пособие |
-173- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
y
m 1
1
 2
2
m 1 |
|
m |
|
|
|
|
3 |
|
xm 1 |
xm |
x |
xm 1 |
Рис. 3.61. Замена касательной хордой: 1 – хорда центральной разности; 2 – хорда разности вперед; 3 – хорда разности назад
Ввиду того что хорды близки по наклону касательной, вычисляемый тангенс будет близок по своему значению первой производной функции.
При численных методах решения технических задач, описываемых дифференциальными уравнениями, дискретизация непрерывной области ее конечно-разностными аналогами во многом определяет трудность решения задачи. Дискретизация фактически задает число областей (узлов), которое, в свою очередь, определяет число неизвестных величин и, следовательно, размерность системы уравнений, к которой сводится задача. Число узлов должно выбираться на основе компромисса между точностью решения (большее число узлов дает более точное решение) и объемами вычислений.
После дискретизации разностные уравнения могут быть получены из дифференциальных при помощи обобщенных формул. Так, для частной производной по одной координате формула будет иметь следующий вид:
|
n |
yn |
|
1 |
n |
n! |
|
y(i n |
|
|
|
|
( 1)m |
m), |
(3.53) |
||||||
k |
n |
m!(n m)! |
||||||||
|
|
hk m 0 |
2 |
|
|
|||||
Компьютерные технологии в приборостроении. Учеб. пособие |
-174- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
где n – порядок производной; у – искомая функция; k – координата; hk – шаг сетки в направлении k; i – номер узла по координате k, для которого вычисляется производная.
Пример. Необходимо записать разностный аналог для частной произ-
водной четвертого порядка по одной координате: 4 у4 .
х
Вычисления необходимо вести относительно i-го узла. Первые два элемента суммы запишем подробно, а остальные – в сокращенном виде:
при m = 0 |
= ( 1)0 |
|
|
|
4! |
|
|
|
y(i + 4 |
0) = yi+2; |
||||
1(4 |
0)! |
|||||||||||||
|
m=0 |
|
|
|
2 |
|
||||||||
при m=1 |
= ( 1)1 |
|
|
4! |
|
|
|
y(i + |
4 1) = 4yi+1; |
|||||
1(4 |
1)! |
|||||||||||||
|
m=1 |
|
|
|
2 |
|
||||||||
при m= 2 |
= 6уi ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m=2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
при m= 3 |
= 4уi 1; |
|
|
|
|
|
|
|
|
|||||
|
m=3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
при m= 4 |
= уi 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
m=4
Окончательная запись будет иметь вид
4 y |
|
y |
4y |
+ 6y 4y |
+ 4y |
||
|
|
i 2 |
i 1 |
i |
i+1 |
i+2 |
. |
x4 |
|
|
h4 |
|
|
||
|
|
|
|
|
|
||
|
|
|
|
X |
|
|
|
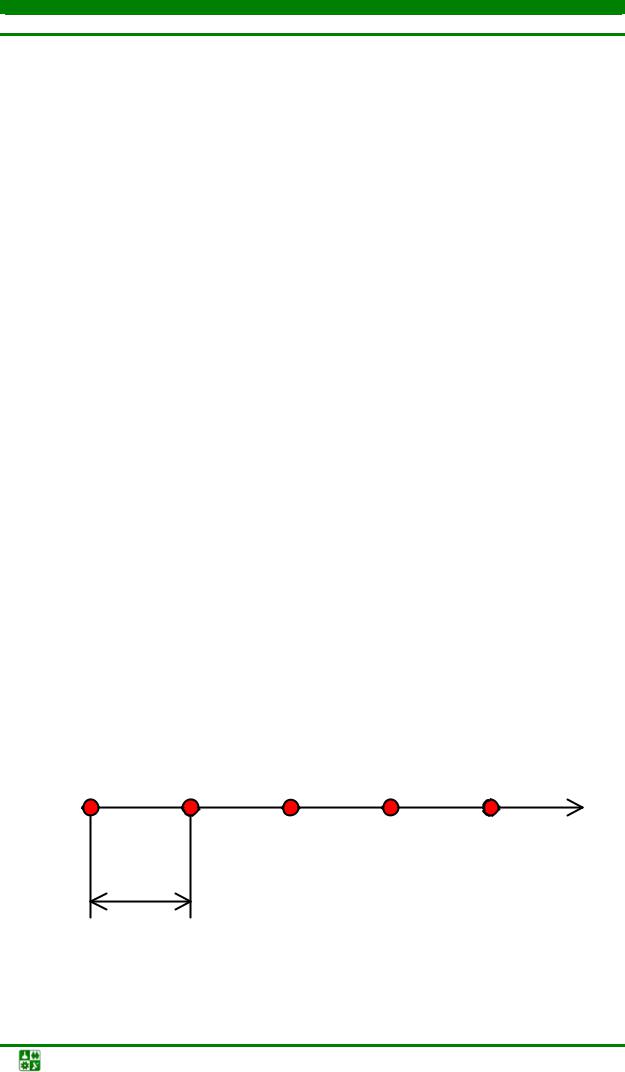
Полученный аналог можно представить графически, как это показано на рис. 3.62.
yi-2 yi-1 |
yi yi+1 |
yi+2 |
х |
|
|
|
hx
Компьютерные технологии в приборостроении. Учеб. пособие |
-175- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
4 у
Рис. 3.62. Графическое представление конечно-разностного аналога х4
Для смешанной производной по аналогии с (3.53) формула будет иметь
вид
|
n f |
|
|
|
1 |
|
n p p |
n p |
|
|
p |
(n p)! |
|
|||||
|
|
|
|
|
|
|
|
( 1) |
|
( 1) |
|
|
|
|
|
|
||
x |
n p |
y |
p |
n p |
p |
|
|
m!(n p m)! |
||||||||||
|
|
|
|
hx |
hy |
m 0 q 0 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.54) |
|
|
|
|
|
p! |
|
|
f (i n p m, |
k |
p |
q), |
|
||||||
|
|
|
q!( p q)! |
2 |
|
|||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
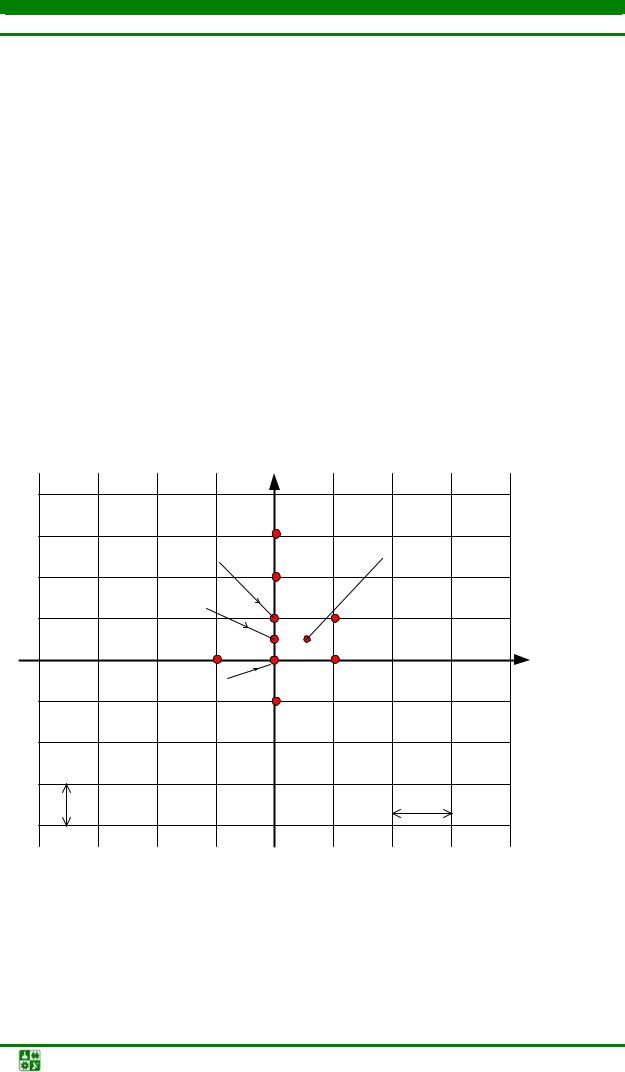
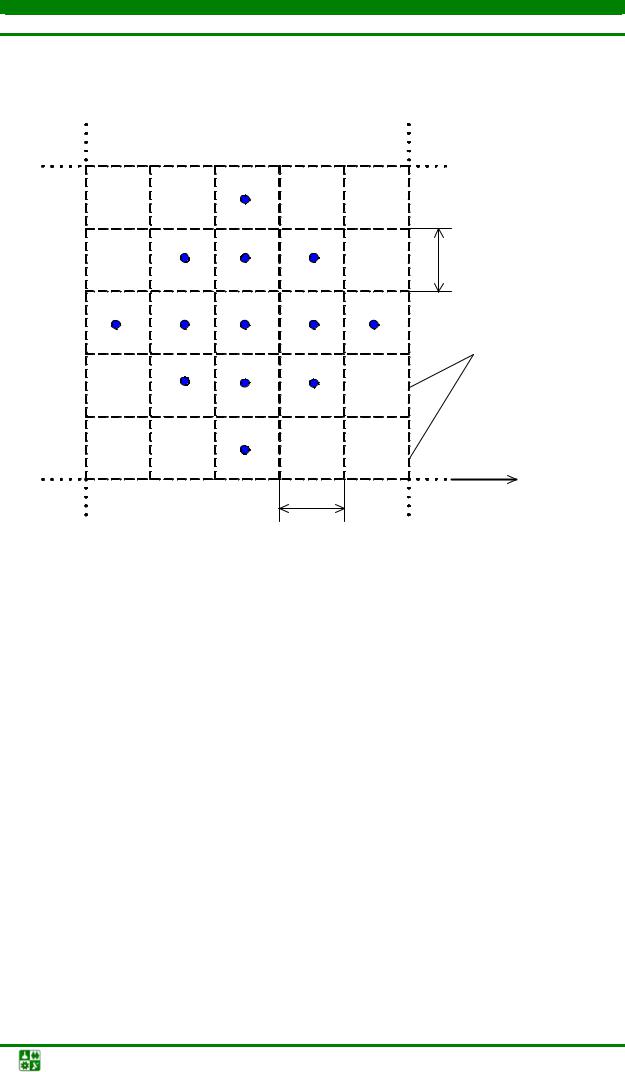
где f – искомая функция; х и у – координаты.
При записи разностных аналогов производных по формулам (3.53) и (3.54) в выражения могут войти значения искомой функции в точках, лежащих между узлами сетки (k + 0,5 или i + 0,5 и k + 0,5), как это показано на рис. 3.63.
Рис. 3.63. Пример дискретизации функции f(i, k)
В таких случаях значения функции определяются линейной интерполяцией по значениям функции в ближайших узлах, окружающих точку. Напри-
мер, для функции f на рис. 3.63:
Компьютерные технологии в приборостроении. Учеб. пособие |
-176- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
f (i, k 0,5) 12[ f (i, k) f (i, k 1)]
или
f (i 0,5, k 0,5) 14[ f (i, k) f (i, k 1) f (i 1, k 1) f (i 1, k)].
Конечно-разностнаязаписьисходногоуравнения
Используя выражения (3.53) и (3.54), запишем разностный аналог для уравнения (3.51) с учетом ранее принятых допущений. При этом будем записывать аналоги относительно 0-го узла и использовать нумерацию узлов, принятую на рис. 3.64, на котором изображен фрагмент печатной платы, разбитый дискретизационной сеткой на элементарные участки.
Запись разностного аналога (3.51) будем выполнять по частям:
|
|
|
|
4w0 |
|
w10 4w1 6w0 4w3 w12 |
; |
|
|
|||||||||
|
|
|
|
x4 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
h4 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
4w |
|
w |
4w |
|
6w |
4w |
w |
|
|
|||||||
|
|
|
0 |
|
|
9 |
4 |
|
0 |
|
2 |
|
11 |
; |
|
|
|
|
|
|
|
y4 |
|
|
|
|
|
h4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
4w |
|
w |
w |
w |
w 4w 2w |
|
2w |
2w |
2w |
|||||||||
0 |
|
7 |
8 |
|
|
6 |
5 |
|
0 |
3 |
|
1 |
4 |
2 |
. |
|||
x2 y2 |
|
|
|
|
|
|
|
|
|
h2h2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
|
|
|
|
|
|
|
Компьютерные технологии в приборостроении. Учеб. пособие |
-177- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
 y
y
|
|
11 |
|
|
|
|
6 |
2 |
7 |
|
hy |
|
|
|
|
|
|
10 |
1 |
0 |
3 |
12 |
Дискретизационная |
|
|
|
|
|
|
|
|
|
|
|
сетка |
|
5 |
4 |
8 |
|
|
9
x
hx
Рис. 3.64. Фрагмент печатной платы с нанесенной на нее дискретизационной сеткой
Подставив полученные выражения в исходное уравнение, проведя несложные преобразования и оставив при этом производную по времени в аналоговом виде, получим
|
4( |
|
|
|
h2 |
|
|
|
h2 ) |
|
|
|
|
|
|
4( |
|
h2 |
|
|
|
|
h2 ) |
|
|
||||||
|
D |
x |
D |
xy |
|
|
|
|
|
|
D |
D |
xy |
|
|
||||||||||||||||
|
|
|
|
|
|
|
y |
|
y |
(wk w0 ) |
|
|
y x |
|
|
|
|
|
|
y |
(wk w0 ) |
|
|||||||||
|
|
|
|
|
|
|
|
4 2 |
|
|
|
|
|
2 4 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
hxhy |
|
|
k 1,3 |
|
|
|
|
|
hx hy |
|
|
k 2,4 |
|
||||||||||
|
2 |
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|||||||
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|||||||||||||
|
xy |
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
(wk w0 ) |
|
|
4x |
(wk w0 ) |
|
|
|
|
|
(wk w0 ) |
(3.55) |
|||||||||||||||||
|
2 2 |
|
|
|
|
4 |
|
||||||||||||||||||||||||
|
|
hxhy |
|
k 5 |
|
|
|
hx |
k 10,12 |
|
|
|
|
hy |
k 9,11 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
d |
2w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая, что пластина разбивается на участки дискретизационной сеткой (рис. 3.64), целесообразно в последнем слагаемом полученного уравнения перейти к массе участка hx × hу, в центре которого находится нулевая точка. Для этого все члены уравнения (3.55) умножим на hx ·hу. Кроме этого для решения задачи в частной области при гармоническом воздействии операцию дифференцирования по времени можно заменить умножением на j
Компьютерные технологии в приборостроении. Учеб. пособие |
-178- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
( – частота гармонического колебания). Учитывая вышеизложенное, получим:
|
4( |
|
|
h2 |
|
|
h2 ) |
|
|
|
|
|
|
h2 |
|
|
|
|
|
h2 ) |
|
|
||
|
D |
D |
(wk w0 ) |
4(D |
D |
|
|
(wk w0 ) |
|
|||||||||||||||
|
|
|
x y |
|
|
xy y |
|
|
y x |
|
xy |
y |
|
|||||||||||
|
|
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
hxhy |
|
|
k 1,3 |
|
|
|
hxhy |
|
|
k 2,4 |
|
||||||||
|
2D |
xy (wk w0 ) D |
x3hy |
(wk w0 ) D |
y3hx |
( k 0 ) |
(3.56) |
|||||||||||||||||
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
hxhy |
k 5 |
|
|
|
hx |
k 10,12 |
|
|
|
|
|
|
hy |
|
k 9,11 |
|
|||||||
т0 ( j )2 w0 0,
где m0 s hx hy – масса участка пластины.
На заключительном этапе необходимо разделить каждое слагаемое
(3.56) на j .
Таким образом, уравнение (3.56), составленное для нулевого узла, описывает состояние прямоугольного элемента платы в зависимости от перемещений соседних узлов.
По аналогии с (3.56) необходимо описать все внутренние узлы дискретизационной сетки, накладываемой на печатную плату.
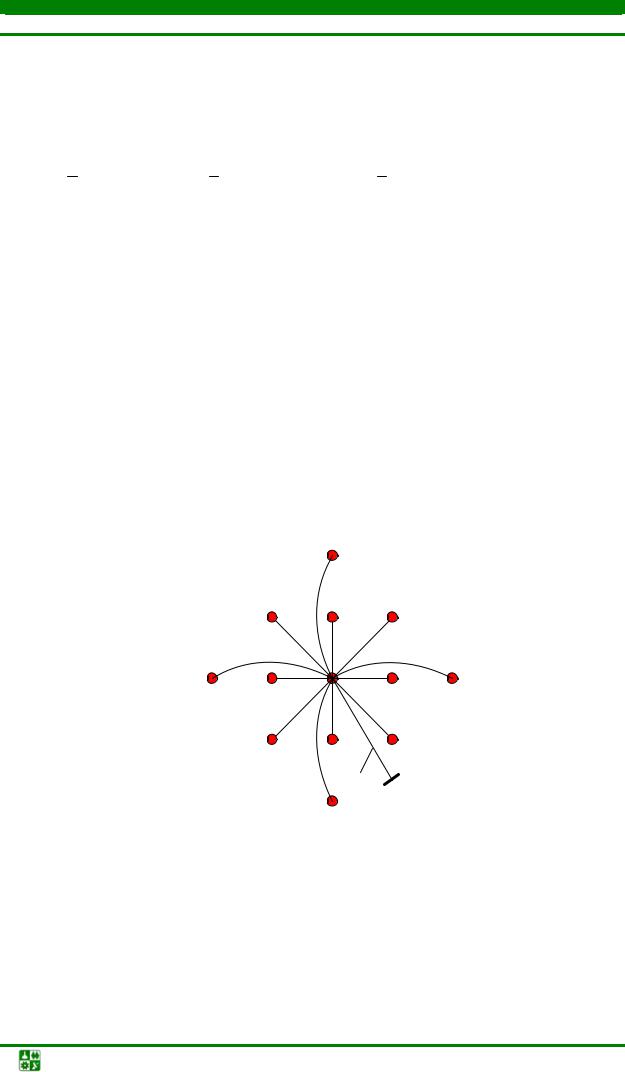
В дальнейшем можно перейти к унифицированной топологической 1; 9 форме модели.
Так, например, топологический граф, описываемый уравнением (3.12), приведен на рис. 3.65.
|
|
w11 1 |
|
|
|
|
|
w6 |
6 |
w22 |
7 |
w7 |
|
w10 |
w1 |
|
|
|
3 w3 |
w12 |
10 |
1 |
0 |
|
12 |
||
|
w5 |
5 |
w44 |
8 |
w8 |
|
|
|
w9 |
m0 |
|
|
|
|
|
9 |
|
|
|
|
Рис. 3.65. Фрагмент графа топологической модели механических процессов печатного узла
Представленный на рис. 3.65 граф может быть описан в обобщенном виде с использованием переменных узлов и ветвей, а также параметров ветвей:
ij xij (wi w j ), |
(3.57) |
Компьютерные технологии в приборостроении. Учеб. пособие |
-179- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
где ij – переменная ij-й ветви; хij – параметр ветви, включенной между узлами i и j.
Приведенный на рис. 3.65 фрагмент модели характеризуется тем, что в центре каждого участка, образованного дискретизированной сеткой, сосредотачивается масса участка печатной платы и части элемента, попавшего в рассматриваемый участок. Узлы, моделирующие соответствующие части печатной платы, соединяются между собой ветвями, которые моделируют вязкоупругие свойства материала печатной платы. При перемещении узлов происходит деформация связей – в них возникают напряжения, влияющие на диссипативные свойства материала печатной платы. Зависимость коэффициента рассеивания энергии ij от величины механического напряжения можно представить в виде 2, 11
0 А |
|
|
|
, |
(3.58) |
|
|
где 0 – значение при механическом напряжении , стремящемся к нулю;
А– коэффициент зависимости от (для стеклотекстолита A 2 10 9 ). Выражения для вычисления параметров ветвей графа модели, пред-
ставленной на рис. 3.65, приведены в табл. 3.3. На рис. 3.66 приведен пример топологической модели механических процессов печатного узла.
При анализе механических характеристик печатных узлов, входящих в состав систем вторичного электропитания, приемопередающих устройств и т. д., следует учитывать температурную зависимость физико-механических характеристик материала печатных плат, так как ПУ, входящие в энергонасыщенные устройства ПС, работают в тяжелом тепловом режиме (температуры отдельных участков печатных плат могут достигать 100–120 °С при их перепаде по плате на 15–40 °С). Высокие температуры приводят к значительным изменениям коэффициента рассеивания механической энергии (см. рис. 3.51), а также модуля Юнга 24 .
Так, увеличение температуры стеклотекстолита до 120 °С приводит к снижению модуля Юнга почти на порядок. В результате, изменения физи- ко-механических параметров материала печатных плат приводят к значительным изменениям механических характеристик печатных узлов, что подтверждается экспериментальными исследованиями.
Компьютерные технологии в приборостроении. Учеб. пособие |
-180- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
 y
y
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
+ a1 |
16 |
|
17 |
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
3 |
|
m16 |
m17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
|
|
|
11 |
|
12 |
|
|
VT1 |
Oпора5 |
|
|
|
|
|
|
|
А1 |
|
||||
|
|
|
2 |
m11 m12 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
6 |
m7 |
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
m6 |
|
|
|
R2 |
|
|
|
+ |
|
|
|
|
|
|
C3 |
|
|
||
|
1 |
2 |
|
|
|
C1 |
|
|
|||
|
a2 |
|
m1 |
m2 |
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
x |
|
|
0 |
|
|
|
|
|
|
|
||
|
|
1 |
2 |
|
|
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Oпора4 |
|
|
Oпора6 |
|
|
|
Рис. 3.66. Фрагмент структуры топологической вибрационной модели печатного узла
Таблица 3.3 Параметры ветвей графомеханической модели печатного узла
Тип |
Графическое изображение |
|
|
|
|
|
|
|
Аналитическое выражение |
|
|
||||||||||||||||||
ветви |
|
ветви и пояснение |
|
|
|
|
|
для вычисления параметра ветви |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||||
|
|
i |
k |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
ik |
|
4(Dxhy |
Dxyhx |
|
) |
, |
|
|
||||||||||||||
|
|
|
|
|
x |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
h 3h |
y |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|||||
1 |
|
|
x |
|
|
|
|
|
|
|
|
|
|
E1(1 j |
|
|
|
) S3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
где Dx |
|
|
|
|
|
|
2 |
|
|
|
; |
|
|
||||||||||||
|
Ветвь типа |
|
|
|
|
12(1 12 ) |
|
|
|
|
|
||||||||||||||||||
|
0–1, 3–0 и т. п. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Dxy – см. ветвь 5-го типа |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4(Dyhx2 |
Dxyhy |
2 ) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
xik |
|
, |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
h h |
3 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
y |
|
|
|
|
|
|
||||||
2 |
|
i |
|
|
|
|
|
|
|
|
|
|
|
E1(1 j |
|
) S3 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
x |
где Dx |
|
|
|
|
|
|
2 |
|
|
|
; |
|
|
||||||||||||
|
|
|
|
|
|
12(1 2 ) |
|
|
|
|
|
||||||||||||||||||
|
Ветвь типа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||
|
|
|
D |
xy – см. ветвь 5-го типа |
|
|
|
|
|
|
|||||||||||||||||||
|
0–2, 4–0 и т. п. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Компьютерные технологии в приборостроении. Учеб. пособие |
-181- |
|||||||||||||||||||||||||||

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
|
Ветвь типа |
|
|
|
|
|
|
|
|
10–0, 0–12 и т. п. |
|
|
|
|
|
||
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hy |
|
3 |
i |
k |
|
ik |
|
Dx |
||
x |
||||||||
|
h3 |
|||||||
|
m |
|
|
|
|
|||
|
|
|
|
|
x |
|||
Ветвь отсутствует, x если в узле m находится опора
Компьютерные технологии в приборостроении. Учеб. пособие |
-182- |
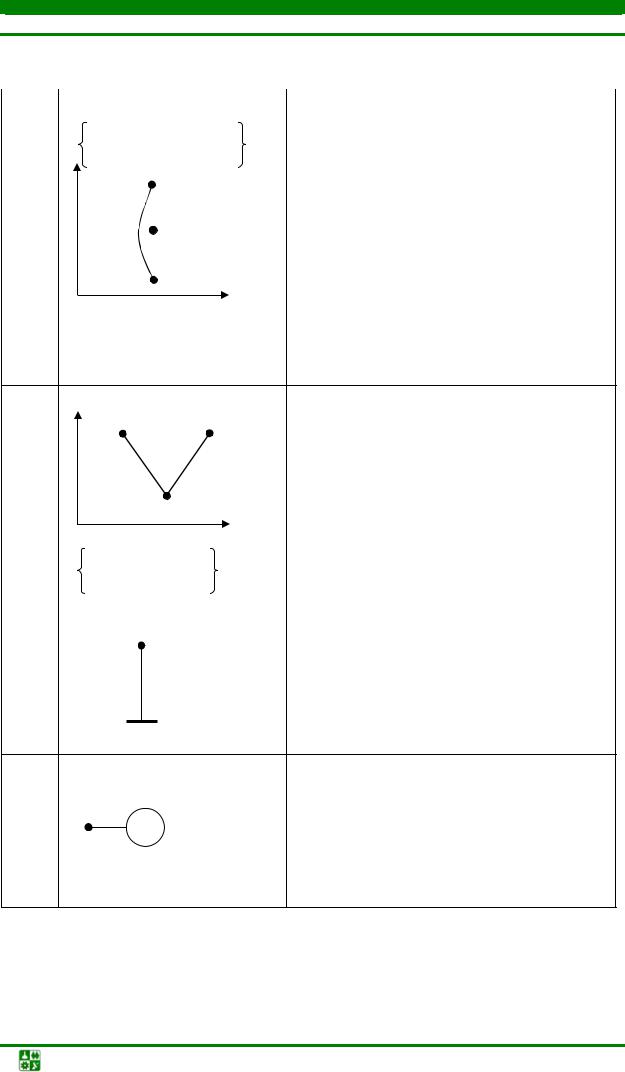
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Окончание табл. 3.3
1 |
2 |
3 |
|
Ветвь типа |
|
|
y9–0, 0–11 и т. п. |
|
|
k |
|
|
m |
|
|
|
|
yhx |
4 |
|
|
|
D |
||
|
xik |
|||||
|
|
|
h 3 |
|||
|
i |
|
|
|
|
y |
|
x |
|
|
|||
|
|
|
|
|||
Ветвь отсутствует, если в узле m находится опора
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
g |
|
|
|
|
xik xig |
2Dxy |
, |
|
||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
h h |
y |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
||
5 |
|
|
где |
|
xy |
|
x 1 |
|
|
|
|
|
|
|
|
||
|
i |
D |
D |
|
|
|
|
|
|
|
|||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
E45 (1 j |
|
) / 2(1 45 ) |
|
||||||||
|
|
|
|
|
|
2 |
|
||||||||||
Ветвь типа |
S |
3 |
|
|
|
|
|
. |
|||||||||
|
|
|
|
|
|
|
6 |
|
|
|
|
||||||
5–0, 0–6 и т. п. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
i |
|
|
|
xi0 mi s hx hy M э , |
|
||||||||||
6 |
|
m i |
где M э – масса элементов, по- |
|
|||||||||||||
|
|
|
|||||||||||||||
0павших в i-й дискретный узел модели
7 |
i + |
аi |
– |
|
Источник вибрационного |
|
|||||
|
|
|
|
воздействия |
|
|
|
|
|
|
Компьютерные технологии в приборостроении. Учеб. пособие |
-183- |
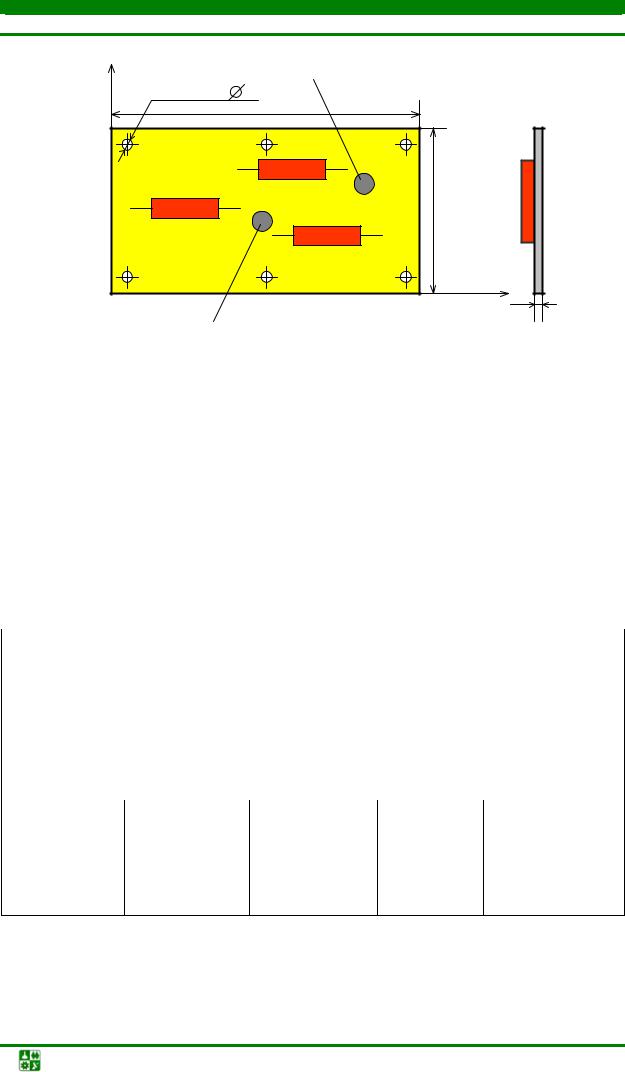
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Рис. 3.67. Эскиз конструкции тестового печатного узла
На рис. 3.67 (см. также табл. 3.4) приведен эскиз конструкции тестового печатного узла, выполненного на основе стеклотекстолита СТЭФ. На печатной плате устанавливались параллельно соединенные резисторы, на которые от блока питания Б5-45 для создания различных перегревов подавались различные по величине напряжения. Температуры печатной платы в различных местах платы и на резисторах измерялись при помощи термоиндикато-
ров плавления (ТУ 6-09-17-39-78).
Таблица 3.4 Параметры элементов, устанавливаемых на тестовых печатных узлах
Обозначение, |
Координаты установки, мм |
|
Масса, г |
Примечание |
||
название |
по оси 0x |
|
по оси 0y |
|
||
элемента |
(нач.–кон.) |
|
(нач.–кон.) |
|
|
|
R1 |
9–31 |
|
8–16 |
|
1,8 |
МЛТ-2 |
R2 |
61–84 |
|
12–19 |
|
1,8 |
МЛТ-2 |
R3 |
75–97 |
|
4–11 |
|
1,8 |
МЛТ-2 |
Датчик № 1 |
99–103 |
|
12–16 |
|
0,6 |
– |
Датчик № 2 |
55–58 |
|
10–14 |
|
0,6 |
– |
|
|
|
Условия крепления |
|
|
|
Опора 1 |
3 |
3 |
|
– |
|
|
Опора 2 |
3 |
22 |
|
– |
Центры установки |
|
Опора 3 |
112 |
3 |
|
– |
||
Опора 4 |
112 |
22 |
|
– |
|
|
Опора 5 |
57 |
3 |
|
– |
|
|
Опора 6 |
57 |
22 |
|
– |
|
|
На плату при помощи герметика КЛТ-30 марки А (ОСТ 38.03271–82) устанавливались измерительные датчики. Результаты измерений температуры приведены в табл. 3.5.
Компьютерные технологии в приборостроении. Учеб. пособие |
-184- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Таблица 3.5
Результаты измерения температур
|
Напряжение, |
Температуры печатной |
Температуры поверхностей |
|||||
№ |
платы в месте |
|||||||
|
резисторов, °С |
|
||||||
п/п |
подаваемое |
установки датчиков, °С |
|
|
||||
|
|
|
|
|||||
|
на схему, В |
|
|
|
|
|
|
|
|
Датчик 1 |
Датчик 2 |
R1 |
|
R2 |
R3 |
||
1 |
6,5 |
41 1,5 |
36 1,7 |
42 1,4 |
|
46 1,3 |
47 64 |
|
|
|
|
|
|
|
|
|
|
2 |
9,3 |
61 1,5 |
54 1,6 |
65 1,5 |
|
70 1,4 |
70,5 1,3 |
|
|
|
|
|
|
|
|
|
|
3 |
11,2 |
70,5 1,4 |
63 1,6 |
81 1,5 |
|
86 1,6 |
88 1,7 |
|
|
|
|
|
|
|
|
|
|
Тестовые печатные узлы подвергались воздействию гармонической вибрации в диапазоне частот 10–2000 Гц при различных уровнях виброперегрузок и вариантах крепления согласно табл. 3.6.
Таблица 3.6 Параметры воздействий и крепления тестовых печатных узлов
Вариант |
Частотный диапазон, |
Количество точек |
Входное |
воздействий |
Гц |
крепления |
воздействие, g |
|
|
|
|
1 |
10–2000 |
4 |
1 |
2 |
10–2000 |
4 |
6 |
3 |
10–2000 |
4 |
10 |
4 |
10–2000 |
6 |
1 |
5 |
10–2000 |
6 |
6 |
6 |
10–2000 |
6 |
10 |
Схема экспериментальной установки показана на рис. 3.68. На рис. 3.69 приведены примеры диаграмм, полученных при помощи установки. Табл. 3.7 содержит результаты измерений пяти тестовых печатных узлов при различных исходных параметрах испытаний. Как видно из результатов испытаний, повышение температуры на 50 °С приводит к значительному снижению резонансных частот (на 25–35 %) и повышению виброперегрузок в 1,2–1,5 раза.
Компьютерные технологии в приборостроении. Учеб. пособие |
-185- |
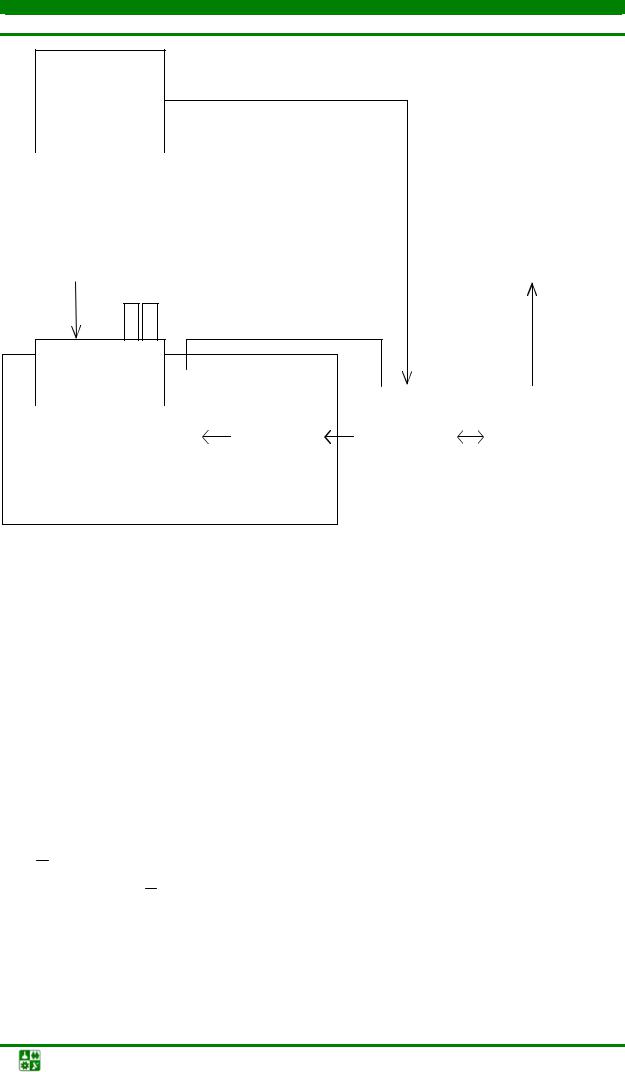
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Согласующие
усилители
2626
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Печатающее |
|
Блок |
||||||||||
|
|
|
|
|
|
|
|
устройство |
||
питания |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
EPSON |
||
Б5-48 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исследуемый |
|
|
|
|
|
|
||
объект |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система |
|
Система |
|
|
|
|
|
||||
Вибратор |
|
Усилитель |
|
управления |
|
управления |
||
|
МРА |
|
и анализа |
|
и анализа |
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
DVS-500 |
|
DVS-500 |
|
|
|
|
|
|
|
|
|
Вибростенд V964LS
Рис. 3.68. Укрупненная схема экспериментальной установки
Link Dinamic System
Для учета тепловых воздействий в расчетной модели необходимо вычислять параметры ветвей (см. табл. 3.3) с использованием следующих зависимостей:
|
(1 k |
t |
T ) , |
(3.59) |
|
i |
i |
|
i |
|
|
i – значение , вычис-
ленное согласно (3.58); kt – коэффициент аппроксимации зависимости (Т); Тi – температура i-го участка (дискрета) печатной платы.
|
|
|
|
|
(3.60) |
Ei E0 kE Ti , |
|||||
где E0 – значение модуля Юнга при Т = 0 °С; kE – коэффициент аппроксимации зависимости E (T ) .
Компьютерные технологии в приборостроении. Учеб. пособие |
-186- |
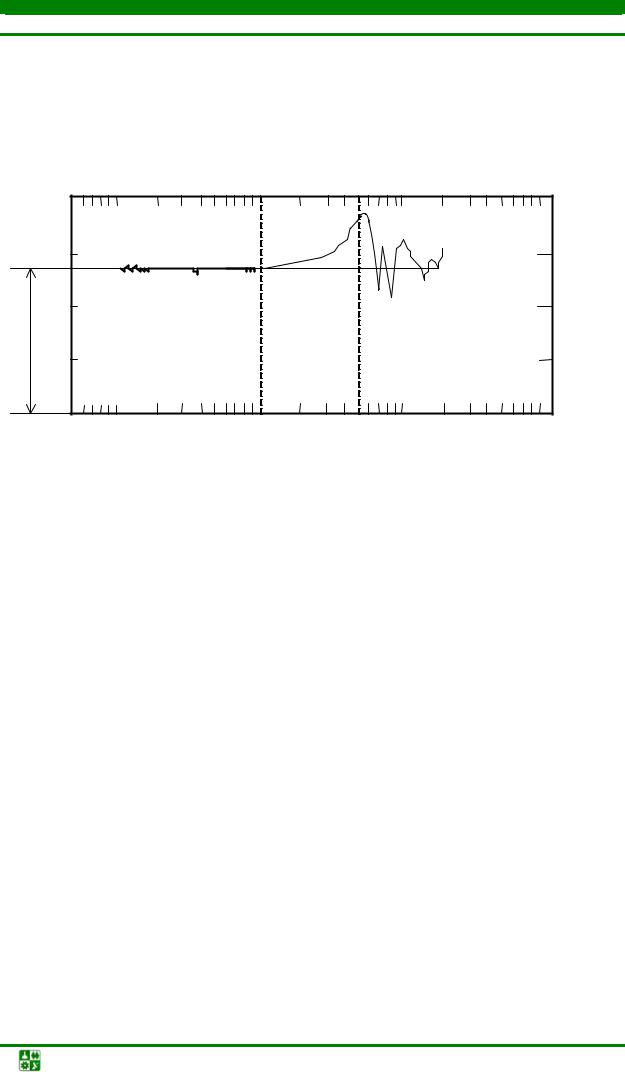
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
DVC 500 SINE TEST PROC S1A/AT/02 |
MAXIMUM CONTROL – COMP RATE[ 0 ] |
|
TEST: U = 6,5V |
CNTRL CHANS: 3, 4 |
|
DATE: |
AUXIL CHANS: 1, 2 |
|
1 |
SWEEPS (UNIDIRECTIONAL) |
|
1 |
OCT/MIN: SWEEP NO 1 |
|
LIST Y/N
|
G |
P O S T T E S T C H A N N E L 2 R E S P O N S E |
|
|
|||
|
|
|
|
|
|
|
|
|
1 0 0 |
|
|
|
|
|
|
|
1 0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
6 g |
|
|
|
|
|
|
|
|
0 .1 |
|
|
|
|
|
|
|
0 .0 1 |
|
|
|
|
|
|
|
5 |
1 0 |
1 0 0 |
5 0 0 |
1 0 0 0 |
2 0 0 0 |
1 0 0 0 0 |
|
|
|
FREQUENCY (HERTZ) |
|
|
|
|
DVC 500 SINE TEST PROC S1A/AT/02 |
MAXIMUM CONTROL – COMP RATE[ 0 ] |
||||||
TEST: U = 6,5V |
|
CNTRL CHANS: 3, 4 |
|
||||
DATE: |
|
|
AUXIL |
CHANS: 1, 2 |
|
||
1 |
SWEEPS (UNIDIRECTIONAL) |
|
|
|
|
||
1 |
OCT/MIN: SWEEP NO 1 |
|
|
|
|
|
|
|
|
|
|
|
NEXT PAGE Y/N: |
|
|
|
||
|
POST TEST CHANNEL 2 RESPONSE |
|
|
|
|
|||||
FREQ |
G |
FREQ |
G |
FREQ |
|
G |
FREQ |
G |
FREQ |
G |
196 |
6.3 |
198.2 |
7.16 |
199.8 |
|
6.39 |
201.9 |
6.97 |
204.2 |
7.14 |
205.8 |
7.12 |
208.1 |
6.93 |
210.3 |
|
6.89 |
212 |
6.91 |
214.3 |
7.06 |
216.7 |
7.26 |
218.4 |
6.99 |
220.8 |
|
7.16 |
223.2 |
7.6 |
225 |
7 |
227.5 |
6.76 |
229.4 |
7.18 |
231.9 |
|
7.56 |
234.4 |
7.14 |
236.3 |
7.29 |
238.9 |
7.74 |
241.5 |
7.47 |
243.4 |
|
7.6 |
246.1 |
7.66 |
248.8 |
7.41 |
250.8 |
7.72 |
253.5 |
7.29 |
256.3 |
|
7.66 |
258.4 |
7.85 |
261.2 |
7.78 |
264 |
7.93 |
266.2 |
7.62 |
269.1 |
|
7.89 |
272 |
8 |
274.2 |
7.7 |
227.2 |
8.24 |
280.2 |
8 |
282.5 |
|
8.09 |
285.6 |
7.98 |
288.7 |
8.65 |
291 |
8.35 |
294.2 |
8.35 |
297.4 |
|
8.77 |
299.8 |
8.54 |
303.1 |
8.49 |
306.4 |
8.49 |
308.9 |
8.51 |
312.2 |
|
8.49 |
315.6 |
8.68 |
318.2 |
8.06 |
321.7 |
8.56 |
324.4 |
8.54 |
327.9 |
|
8.94 |
331.5 |
9.11 |
334.2 |
9.44 |
337.8 |
9.08 |
341.5 |
9.11 |
344.3 |
|
9.41 |
348 |
9.51 |
351.8 |
9.28 |
354.7 |
9.21 |
358.5 |
9.69 |
362.4 |
|
9.83 |
365.4 |
9.08 |
369.4 |
10.12 |
373.4 |
9.69 |
376.4 |
9.8 |
380.5 |
|
10.49 |
384.7 |
10.57 |
387.8 |
10.4 |
392 |
10.66 |
396.3 |
11.04 |
399.5 |
|
11.66 |
403.9 |
11.85 |
408.3 |
11.88 |
411.6 |
11.41 |
416.1 |
12.31 |
420.6 |
|
13.06 |
424.1 |
12.92 |
428.7 |
13.31 |
433.3 |
13.83 |
436.9 |
14.32 |
441.6 |
|
15.79 |
446.4 |
16.8 |
450.1 |
17.12 |
455 |
23.51 |
458.7 |
28.49 |
463.7 |
|
30.82 |
468.7 |
29.35 |
472.6 |
29.04 |
477.7 |
30.57 |
482.9 |
33.43 |
486.9 |
|
34.25 |
492.1 |
36.35 |
497.5 |
37.15 |
501.6 |
35.57 |
507 |
39.53 |
512.5 |
|
38.06 |
516.7 |
36.95 |
522.3 |
35.48 |
528 |
33.61 |
532.3 |
32.53 |
538.1 |
|
30.99 |
544 |
30.57 |
548.4 |
28.18 |
554.4 |
27.88 |
560.4 |
27.21 |
565 |
|
25.98 |
571.1 |
25.29 |
577.4 |
24.22 |
582.1 |
23.64 |
588.4 |
22.45 |
594.8 |
|
21.85 |
599.6 |
21.5 |
606.2 |
20.64 |
. |
. |
. |
. |
. |
|
. |
. |
. |
. |
. |
. |
. |
. |
. |
. |
а |
. |
. |
. |
. |
. |
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.69. Примеры диаграмм, полученных на установке Link Dinamic System: а – входное воздействие 6 g и U = 6,5 В; б – входное воздействие 6 g и U = 11,2 В
Компьютерные технологии в приборостроении. Учеб. пособие |
-187- |
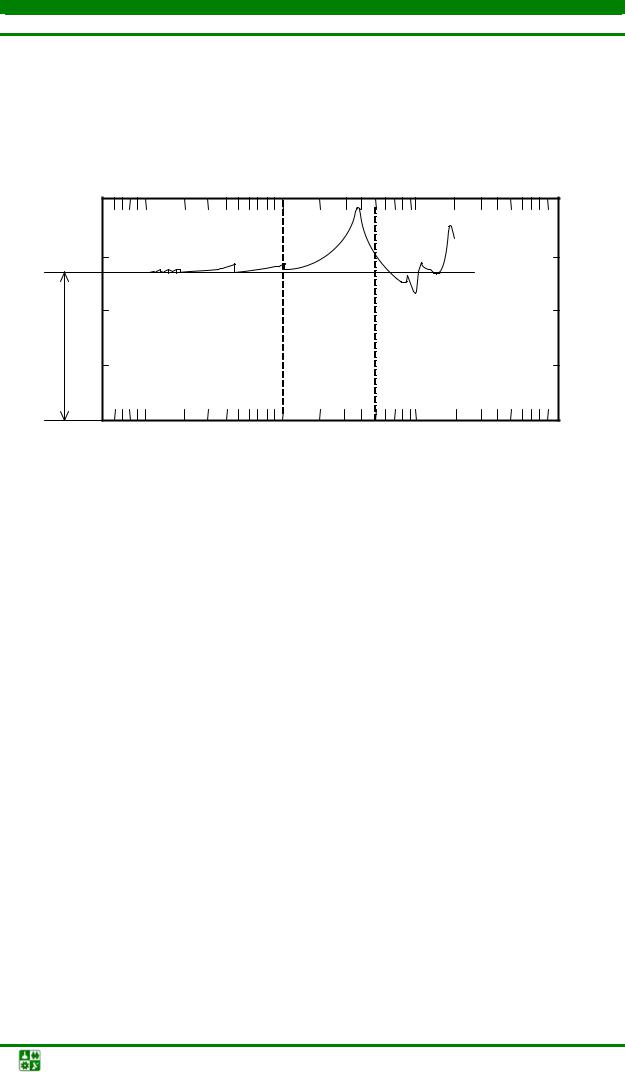
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
DVC 500 SINE TEST PROC S1A/AT/02 |
MAXIMUM CONTROL – COMP RATE[ 0 ] |
|
TEST: U = 11.2V |
CNTRL CHANS: 3, 4 |
|
DATE: |
AUXIL CHANS: 1, 2 |
|
1 |
SWEEPS (UNIDIRECTIONAL) |
|
1 |
OCT/MIN: SWEEP NO 1 |
|
|
LIST Y/N |
G |
P O S T T E S T C H A N N E L 2 R E S P O N S E |
|
|
1 0 0 |
|
|
1 0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
6 g |
|
|
|
|
|
|
|
|
|
|
|
0 .1 |
|
|
|
|
|
|
|
|
|
|
0 .0 1 |
5 |
1 0 |
|
1 0 0 |
5 0 0 1 0 0 0 |
2 0 0 0 |
1 0 0 0 0 |
||
|
|
|
||||||||
|
|
|
|
FREQUENCY (HERTZ) |
|
|
|
|||
DVC 500 SINE TEST PROC S1A/AT/02 MAXIMUM CONTROL – COMP RATE[ 0 ] |
||||||||||
TEST: U = 11.2V |
|
|
|
CNTRL CHANS: 3, 4 |
|
|
||||
DATE: |
|
|
|
|
AUXIL CHANS: 1, 2 |
|
|
|||
1 |
SWEEPS (UNIDIRECTIONAL) |
|
|
|
|
|
|
|||
1 |
OCT/MIN: SWEEP NO 1 |
|
NEXT PAGE Y/N: |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
POST TEST CHANNEL 2 RESPONSE |
|
|
|
|
||||
|
FREQ |
G |
FREQ |
G |
FREQ |
G |
FREQ |
G |
FREQ |
G |
|
132 |
7,24 |
133,1 |
7,37 |
134,5 |
6,97 |
136 |
7,37 |
137,1 |
7,39 |
|
138,6 |
7,58 |
140,1 |
7,27 |
141,2 |
7,33 |
142,8 |
7,58 |
144,3 |
7,31 |
|
145,5 |
7,26 |
147,1 |
7,37 |
148,7 |
7,2 |
149,9 |
7,78 |
151,5 |
7,62 |
|
153,2 |
7,58 |
154,4 |
7,6 |
156,1 |
7,85 |
157,8 |
7,54 |
159,1 |
7,68 |
|
160,9 |
7,93 |
162,2 |
7,68 |
163,9 |
8,02 |
165,7 |
8,2 |
167,1 |
7,91 |
|
168,9 |
8,29 |
170,7 |
8,13 |
172,1 |
8,2 |
174 |
7,93 |
175,9 |
8,54 |
|
177,3 |
8,17 |
179,3 |
8,33 |
181,2 |
8,42 |
182,7 |
8,42 |
184,7 |
8,4 |
|
186,7 |
8,72 |
188,2 |
8,72 |
190,3 |
8,82 |
192,3 |
8,63 |
193,9 |
8,75 |
|
196 |
8,91 |
198,2 |
9,21 |
199,8 |
8,79 |
201,9 |
9,51 |
204,2 |
9,56 |
|
205,8 |
9,38 |
208,1 |
9,72 |
210,3 |
9,77 |
212 |
9,67 |
214,3 |
9,69 |
|
216,7 |
9,93 |
218,4 |
9,96 |
220,8 |
9,8 |
223,2 |
10,32 |
225 |
9,93 |
|
227,5 |
9,91 |
229,4 |
10,69 |
231,9 |
11,16 |
234,3 |
10,86 |
236,3 |
11,01 |
|
238,9 |
11,25 |
241,5 |
11,53 |
243,4 |
11,1 |
246,1 |
11,41 |
248,8 |
12,14 |
|
250,8 |
11,69 |
253,5 |
11,75 |
256,3 |
12,68 |
258,4 |
12,44 |
261,2 |
13,1 |
|
264 |
12,68 |
266,2 |
12,75 |
269,1 |
13,9 |
272 |
13,6 |
274,2 |
14,13 |
|
277,2 |
15,2 |
280,2 |
14,83 |
282,5 |
14,79 |
285,6 |
15,87 |
288,7 |
16,05 |
|
291 |
17,03 |
294,2 |
17,74 |
297,4 |
17,98 |
299,8 |
19,18 |
303,1 |
19,13 |
|
306,4 |
21,73 |
308,9 |
22,27 |
312,2 |
22,69 |
315,6 |
23,96 |
318,2 |
24,88 |
|
321,7 |
26,99 |
324,4 |
27,58 |
327,9 |
29,91 |
331,5 |
31,07 |
334,2 |
34,62 |
|
337,8 |
36,06 |
341,5 |
38,9 |
344,3 |
43 |
348 |
47,4 |
351,8 |
51 |
|
354,7 |
56,37 |
358,5 |
60,81 |
362,4 |
65,96 |
365,4 |
70,77 |
369,4 |
76,34 |
|
373,4 |
76,96 |
376,4 |
77,37 |
380,5 |
76,96 |
384,7 |
73,7 |
387,8 |
65,96 |
|
392 |
62,65 |
396,3 |
53,11 |
399,5 |
49,64 |
403,9 |
44,78 |
408,3 |
41,51 |
|
411,6 |
37,45 |
416,1 |
36,25 |
420,6 |
34,16 |
424,1 |
29,75 |
428,7 |
29,27 |
|
433,3 |
28,11 |
436,9 |
27,28 |
441,6 |
25,7 |
446,4 |
24,02 |
450,1 |
22,82 |
|
455 |
22,45 |
458,7 |
20,81 |
463,7 |
20,3 |
468,7 |
18,88 |
472,6 |
18,98 |
б
Рис. 3.69. Окончание
Компьютерные технологии в приборостроении. Учеб. пособие |
-188- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Таблица 3.7 Результаты измерений механических характеристик тестовых ПУ
Напряже- |
Механические характеристики в контрольных точках |
|
||||
ние пита- |
|
|
|
|
|
|
1-я точка |
2-я точка |
|
||||
ния, под- |
Вариант |
|||||
|
|
|
|
|||
водимое |
1-я |
|
1-я |
|
||
Вибро- |
Вибро- |
воздействий |
||||
к схеме |
||||||
резонансная |
резонансная |
|
||||
нагрузки, |
частота, Гц |
ускорение |
частота, Гц |
ускорение |
|
|
В |
|
|
|
|
|
|
0 |
760–773 |
2,3–2,4 |
760–773 |
2,5–2,7 |
1 |
|
|
|
|
|
26,1–29,1 |
|
|
0 |
668–685 |
8,1–8,6 |
680–696 |
|
||
6,5 |
480–510 |
8,5–8,7 |
505–520 |
37,1–39,7 |
2 |
|
9,3 |
390–415 |
10,1–10,6 |
408–415 |
62,1–64,7 |
||
|
||||||
11,2 |
365–390 |
10,5–12,1 |
370–385 |
73,4–78,0 |
|
|
|
|
|
|
76,8–80,3 |
|
|
0 |
740–753 |
16,5–18,2 |
745–750 |
|
||
6,5 |
673–684 |
18,3–20,4 |
678–693 |
82,4–85,5 |
3 |
|
9,3 |
570–590 |
20,8–23,5 |
620–645 |
87,2–90,7 |
||
|
||||||
11,2 |
752–590 |
23,1–25,7 |
575–600 |
94,6–96,2 |
|
|
0 |
1075–1110 |
1,65–1,73 |
1140–1150 |
1,7–2,1 |
4 |
|
|
|
|
|
9,1–9,4 |
|
|
0 |
1025–1050 |
23,1–24,7 |
1010–1030 |
|
||
6,5 |
910–924 |
32,4–33,9 |
897–916 |
11,5–12,4 |
5 |
|
9,3 |
813–827 |
38,1–40,6 |
800–818 |
13,4–14,8 |
||
|
||||||
11,2 |
726–743 |
42,6–44,2 |
716–732 |
15,7–16,4 |
|
|
0 |
950–968 |
49,3–51,5 |
930–950 |
20,3–21,8 |
|
|
6,5 |
870–881 |
57,4–58,5 |
856–865 |
26,1–27,0 |
6 |
|
9,3 |
784–795 |
60,8–62,5 |
769–777 |
29,2–30,4 |
||
|
||||||
11,2 |
714–720 |
74,9–76,1 |
793–707 |
31,5–32,8 |
|
|
|
|
|
|
|
|
|
При расчете значения , согласно (3.58), необходимо учитывать температурную составляющую механического напряжения. Для этого, используя закон Гука, можно вычислить напряжение как
|
( |
|
k |
|
T ) (1 j |
|
[ |
A | |
| (1 k |
T )]) ( |
|
|
T ), |
(3.61) |
E |
|
|
||||||||||||
|
|
|
||||||||||||
i |
0 |
E |
i |
2 0 |
i |
t |
i |
i |
0 |
i |
|
|||
где – деформация в материале печатной платы; 0 – коэффициент объемно-
го расширения материала платы; i – точка температурного поля печатной платы
Ti = (Тi –Т0),
где Т0 = 25 °С.
Таким образом, использование выражений (3.59)–(3.61) при вычислении параметров ветвей топологической модели (см. табл. 3.3) позволяет учитывать влияние тепловых воздействий на механические характеристики ПУ.
Компьютерные технологии в приборостроении. Учеб. пособие |
-189- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Применение унифицированной топологической формы модели механических процессов ПУ позволяет использовать стандартные методы формирования и анализа математической модели [16]. Для формирования математической модели может быть применен метод узловых потенциалов, а для ее
решения традиционные методы решения матричных уравнений. Если использовать принцип аналогий, то фрагмент графа модели, представленного на рис. 3.64, может быть заменен фрагментом электрической цепи, приведенной на рис. 3.70. Таким образом, может быть сформирована математическая модель электрического аналога, которая анализируется в частотной области [11; 16]. Следует также отметить, что топологическая форма представления механической модели позволяет применять топологические методы анализа функций чувствительностей, рассмотренные во 2-й главе.
В общем виде математическая модель будет иметь следующий вид:
|
|
|
|
|
|
|
(3.62) |
Yij |
|
W = A, |
|||||
где 
 Yij
Yij 
 – матрица параметров (матрица жесткостей, представленная в ком-
– матрица параметров (матрица жесткостей, представленная в ком-
плексном виде); W – вектор реакции (решения); A – вектор возмущения (вектор входных воздействий).
Система (3.62) является нелинейной и может быть проанализирована, например, при гармонических воздействиях при помощи алгоритма, изображенного на рис. 3.71, а. Особенностью представленного алгоритма является возможность автоматического регулирования шага по частоте (блоки 16–19) в зависимости от резонансных явлений, возникающих в моделируемой конструкции. Возможность реализации такого подхода заключается в том, что модель печатного узла за областями резонансных явлений ведет себя как ли-
нейная, в то время как в предрезонансных и резонансных областях как нелинейная, что объясняется диссипативными свойствами материала печатных плат (см. рис. 3.50), которые, в свою очередь, зависят от уровня напряжений, возникающих в материале. С учетом вышеизложенного, зная количество итераций на каждом шаге по частоте, можно регулировать шаг – уменьшать при входе в резонансную область и увеличивать при выходе (или отсутствии)
из резонансных областей. Такой подход позволяет на 25 30 % сократить время анализа модели по сравнению с ее анализом с использованием постоянного шага по частоте. На рис. 3.71, б представлен пример фрагмента результатов работы рассматриваемого алгоритма.
Компьютерные технологии в приборостроении. Учеб. пособие |
-190- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
|
|
|
|
11 |
U11 |
|
|
|
|
|
6 |
U6 |
|
U2 |
2 |
|
U7 |
7 |
|
|
|
|
|
|
|
|
|
||
|
|
|
Rg |
Ly2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Lg |
Ry2 |
|
|
Rg |
|
|
|
|
|
|
|
Ly1 |
Lg |
|
|
|
|
|
|
Lx2 |
|
Ry1 |
Lx2 |
|
|
||
10 |
U1 |
Rx2 |
Lx1 |
|
0 |
Lx1 |
Rx2 |
U3 |
U12 |
|
|
|
|
|
|
|
|
|
|
U10 |
1 |
|
Rx1 |
|
|
Rx1 |
|
3 |
12 |
|
|
Rg |
|
Ry1 |
Ly1 |
Rg |
|
C0 |
|
|
|
|
|
|
|
||||
|
|
|
Lg |
|
|
Lg |
|
|
|
|
|
|
Ly2 |
|
|
|
|
|
|
|
|
|
Ry2 |
|
|
|
|
|
|
|
U5 |
5 |
U4 |
4 |
|
U8 |
8 |
|
|
|
|
|
|
||||||
U9  9
9
Рис. 3.70. Электрический аналог графа топологической модели:
Lх1, Lу1 соответствуют типам № 1, 2 ветвей графа; Lg – типу № 5; Lх2, Lу2 – типам № 3, 4; С0 соответствует типу ветви № 6 графа; Rxi = Ryi = Rg = 2
Система (3.62) является нелинейной и может быть проанализирована, например, при гармонических воздействиях при помощи алгоритма, изображенного на рис. 3.71, а. Особенностью представленного алгоритма является возможность автоматического регулирования шага по частоте (блоки 16–19) в зависимости от резонансных явлений, возникающих в моделируемой конструкции. Возможность реализации такого подхода заключается в том, что модель печатного узла за областями резонансных явлений ведет себя как линейная, в то
время как в предрезонансных и резонансных областях как нелинейная, что объясняется диссипативными свойствами материала печатных плат (см. рис. 3.50), которые, в свою очередь, зависят от уровня напряжений, возникающих в материале. С учетом вышеизложенного, зная количество итераций на каждом шаге по частоте, можно регулировать шаг – уменьшать при входе в резонансную область и увеличивать при выходе (или отсутствии) из резонансных облас-
тей. Такой подход позволяет на 25 30 % сократить время анализа модели по сравнению с ее анализом с использованием постоянного шага по частоте. На рис. 3.71, б представлен пример фрагмента результатов работы рассматриваемого алгоритма.
Компьютерные технологии в приборостроении. Учеб. пособие |
-191- |
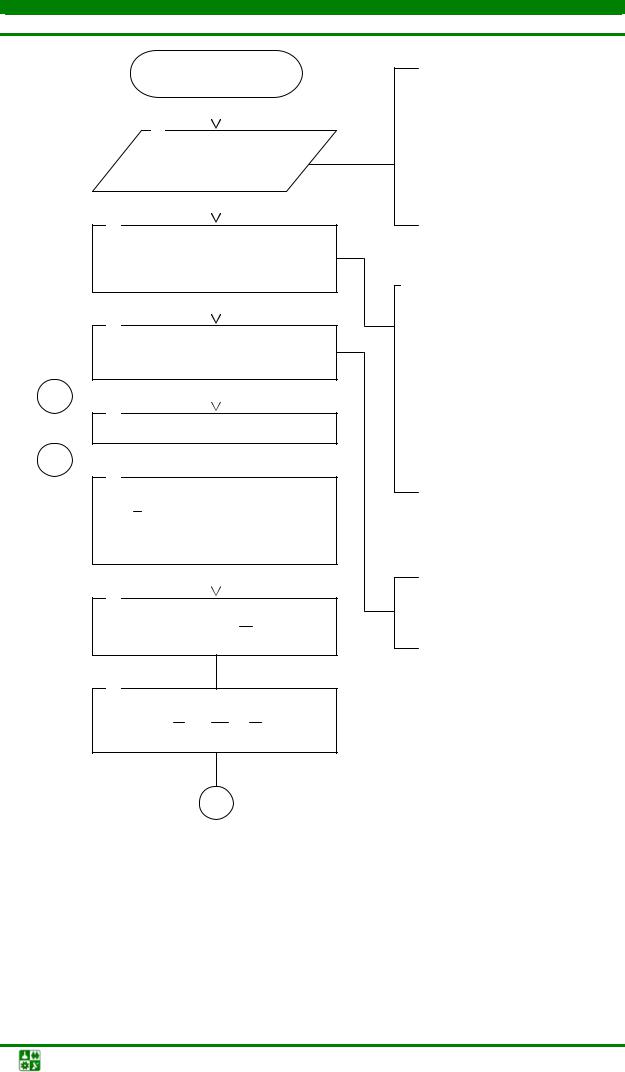

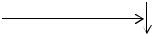





 y
y
 W A
W A
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Начало
Блоки 1–4
алгоритма на рис. 3.76, а
Вычисления Gкр ( ), формирование

 Yij
Yij 
 , где yij Re yij ,Imyij ; i, j = 1,n
, где yij Re yij ,Imyij ; i, j = 1,n
Блоки 6–11, 13, 14
алгоритма на рис. 3.76, а
Вычисление Gкр ( ), I = 1, n; дисперсии на выходе и дисперсии меха-
нического напряжения механических характеристик ПУ
Блоки 16–20 алгоритма на рис. 3.76, а
Конец
Рис. 3.72. Блок-схема алгоритма анализа механической модели ПУ при воздействии случайной вибрации
При анализе ПУ спектральная плотность ускорения в точках ПУ при воздействии случайной вибрации вычисляется через частотную характеристику как
Gi ( ) Gкр( ) | F ( ) |,
Компьютерные технологии в приборостроении. Учеб. пособие |
-194- |
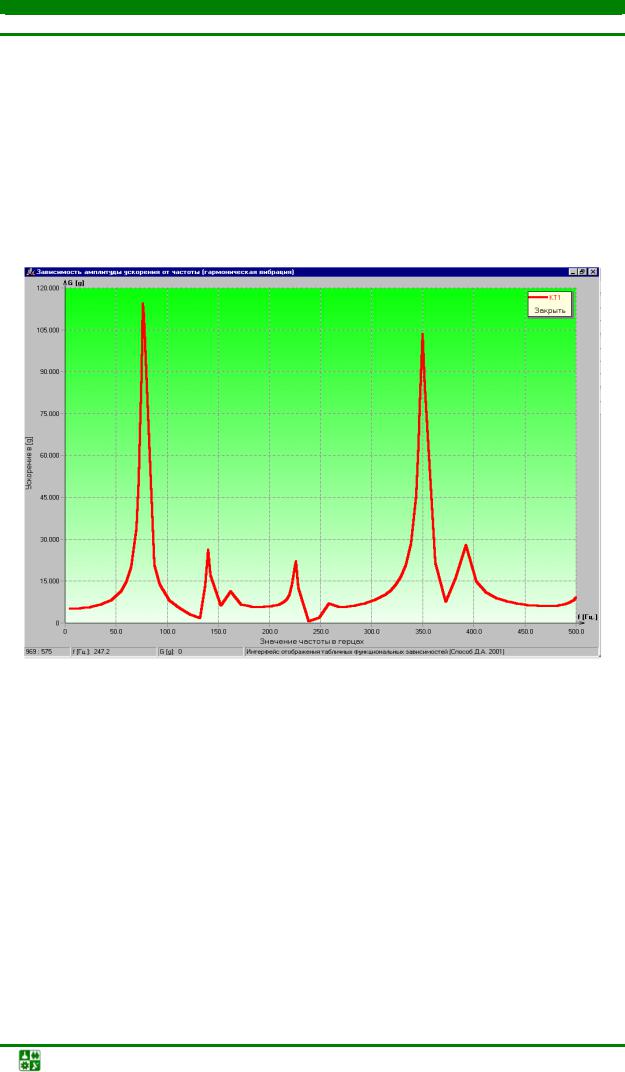
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
где Gi ( ), Gкр( ) – спектральные плотности ускорений в i-й точке ПУ и в
местах крепления ПУ; F( – модуль коэффициента передачи.
С учетом рассмотренного выражения алгоритм анализа механической модели ПУ при воздействии случайной вибрации отличается от алгоритма, представленного на рис. 3.71, а, наличием дополнительных блоков, как это показано на рис. 3.72.
Пример результатов моделирования печатного узла (при воздействии гармонической вибрации), полученных на основе вышерассмотренных моделей и алгоритмов расчета механических характеристик, приведен на рис. 3.73.
a
Рис. 3.73. Пример результатов моделирования механических процессов в печатных узлах:
а– зависимость виброускорения от частоты вибрации в контрольной точке;
б– общий вид собственной формы печатного узла;
в– карта механических режимов работы ЭРЭ печатного узла
Компьютерные технологии в приборостроении. Учеб. пособие |
-195- |
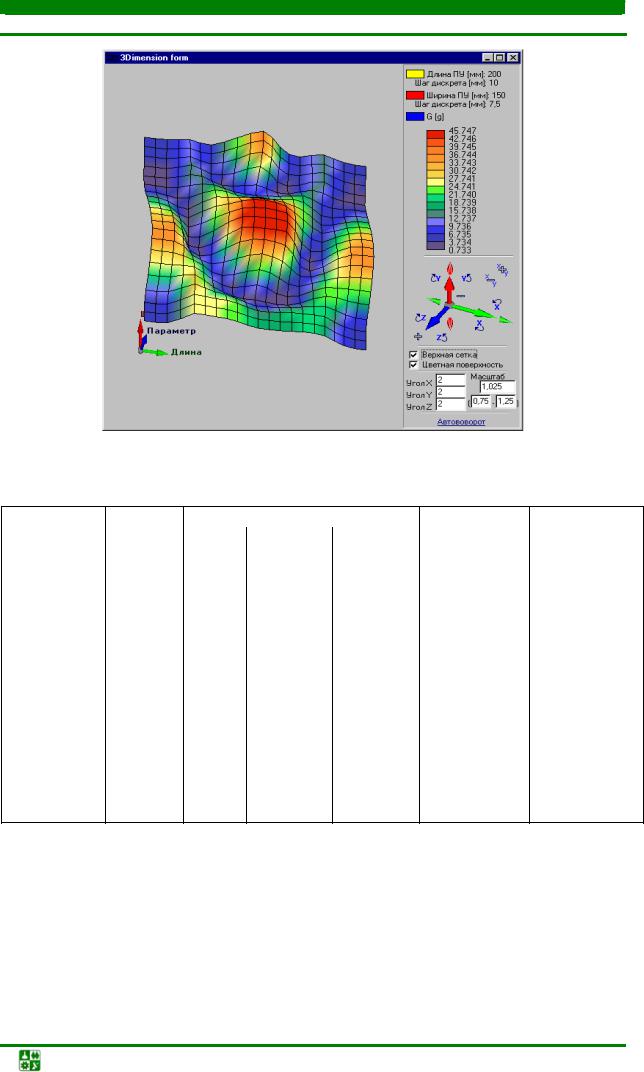
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
б
Карта механических режимов работы ЭРЭ
|
Номер |
|
Ускорение на ЭРЭ |
Коэффициент |
Виброперегрузка |
|
|
|
|
|
|||
Обозначение |
|
Максим. |
Максим. |
|||
поверхн. |
Частота, |
расчетное |
допустимое |
механической |
ЭРЭ, |
|
ЭРЭ |
установки |
нагрузки ЭРЭ, |
||||
|
ЭРЭ на ПП |
Гц |
ускорен., |
по ТУ, |
отн. ед. |
g |
|
|
g |
g |
|
||
|
|
|
|
|
||
C15–C18 |
1 |
1075 |
59,34 |
40,0 |
1,48 |
19,3 |
|
|
|
|
|
|
|
VD1 |
1 |
1075 |
59,34 |
50,0 |
1,19 |
9,3 |
|
|
|
|
|
|
|
L1 |
1 |
1075 |
55,75 |
50,0 |
1,12 |
5,8 |
|
|
|
|
|
|
|
T1 |
1 |
1238 |
89,55 |
50,0 |
1,79 |
39,5 |
|
|
|
|
|
|
|
C7–C10 |
1 |
1238 |
85,28 |
40,0 |
2,13 |
45,3 |
|
|
|
|
|
|
|
L2 |
1 |
1150 |
10,20 |
50,0 |
0,20 |
– |
|
|
|
|
|
|
|
C5 |
1 |
1150 |
10,20 |
40,0 |
0,25 |
– |
|
|
|
|
|
|
|
C6 |
2 |
1150 |
10,8 |
40,0 |
0,25 |
– |
|
|
|
|
|
|
|
C11,C12 |
2 |
1075 |
50,66 |
40,0 |
10,27 |
10,7 |
|
|
|
|
|
|
|
C13,C14 |
2 |
1075 |
58,8 |
40,0 |
10,45 |
18,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в
Рис. 3.73. Окончание
Рассмотренные выше модель механических процессов ПУ и алгоритмы ее анализа позволяют определить все необходимые характеристики ПУ 30 в общем алгоритме проектирования ПС. В рассмотренной модели при определенной модификации могут использоваться модели ЭРЭ, представленные на рис. 3.76, или полученные в результате анализа поля виброускорений и
Компьютерные технологии в приборостроении. Учеб. пособие |
-196- |
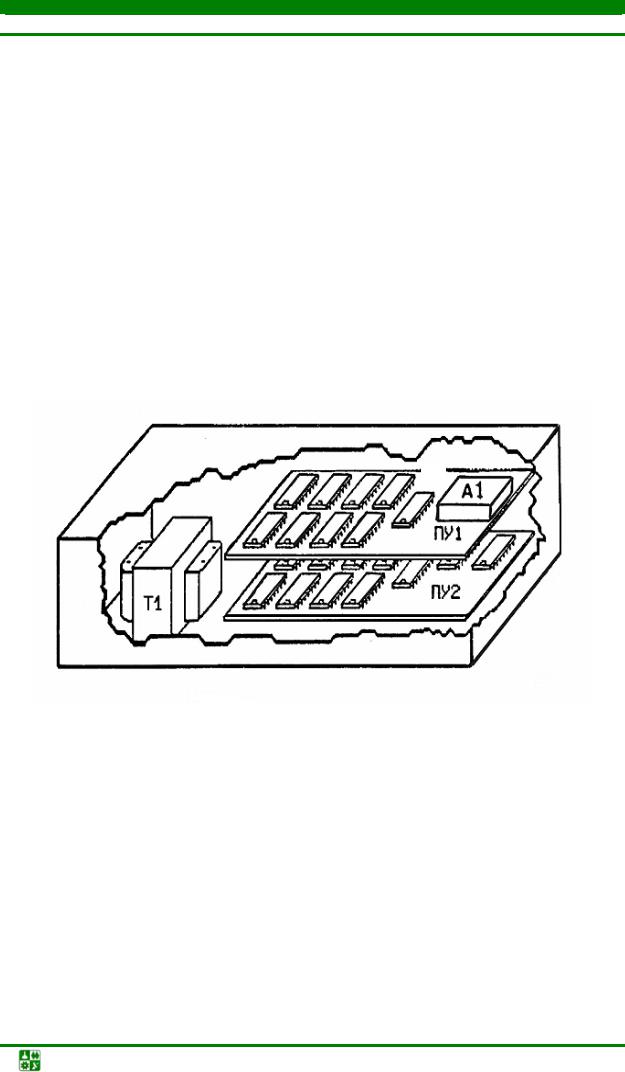
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
перемещений в качестве граничных условий для решения задач по анализу таких моделей ЭРЭ и анализу усталостной прочности выводов ЭРЭ 24 .
В заключение следует отметить, что рассмотренный алгоритм (рис. 3.75) позволяет, используя набор различных моделей, детально исследовать механические процессы, протекающие в конструкции ПС в виде блока. Результаты анализа механических характеристик блока необходимы для этапа топологического проектирования (размещение ЭРЭ на печатных платах, трассировка печатных соединений [14]), расчетов надежности, а также могут использоваться при комплексных исследованиях физических процессов в ПС.
3.3.1.4. АлгоритммоделированиямеханическиххарактеристиквПС
Методику моделирования механических режимов ПС рассмотрим также на примере исследования механических характеристик (МХ) блока ПС
(рис. 3.74).
Рис. 3.74. Эскиз конструкции блока ПС: ПУ1, ПУ2 – печатные узлы; Т1 – трансформатор
На рис. 3.75 приведен укрупненный алгоритм иерархического автоматизированного анализа механических характеристик блока, носящий обобщенный характер. В алгоритме также условно не показаны обратные связи, отражающие итерационный характер процесса проектирования. Рассмотрим кратко приведенный алгоритм.
Компьютерные технологии в приборостроении. Учеб. пособие |
-197- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
лов (ПУ1 и ПУ2), которые представляются в модели блока в виде макромоделей. На данном этапе путем моделирования обеспечиваются также безопасные уровни напряжений, возникающие в материалах конструкции блока. Для обеспечения необходимых механических характеристик в конструкцию блока могут вводиться амортизаторы [22].
Блок 2. Использование результатов моделирования предыдущего этапа (например, амплитудно-частотных характеристик участков конструкции блока в местах крепления ПУ1 и ПУ2, рис. 3.76 г) позволяет исследовать механические характеристики конструктивных узлов ПУ1 и ПУ2 с применением детальных моделей плоских конструкций ПС [2, 11]. В таких моделях учет ЭРЭ осуществляется согласно рис. 3.76, б, т. е. в виде распределенных по плоскости несущей конструкции конструктивного узла масс и жесткостей. В результате моделирования проектировщик обеспечивает вывод в высокочастотную область резонансных частот foi конструктивных узлов (ПУ1, ПУ2) за
рабочий частотный диапазон ∆ fраб (см. рис. 3.76, г), а также необходимый уровень виброперегрузок элементной базы:
Aрэ(i) Aтуэ(i) A1н, i = 1, n, |
(3.63) |
где Aрэ(i) – расчетное значение ускорения на i-м ЭРЭ; |
Aтуэ(i) – допустимое |
значение ускорения на i-м ЭРЭ по ТУ; А1н– коэффициент запаса по надежности (обычно принимают А1н= 0,7 – 0,85); n – количество ЭРЭ в устройстве.
Кроме перечисленных выше характеристик разработчиком осуществляется контроль возникающих в материале несущих конструкций ПУ1 и ПУ2 механических напряжений, а также перемещений участков конструкции ПУ1 и ПУ2 с целью возможности исключения соприкосновения печатных узлов между собой и со стенками блока.
Компьютерные технологии в приборостроении. Учеб. пособие |
-199- |
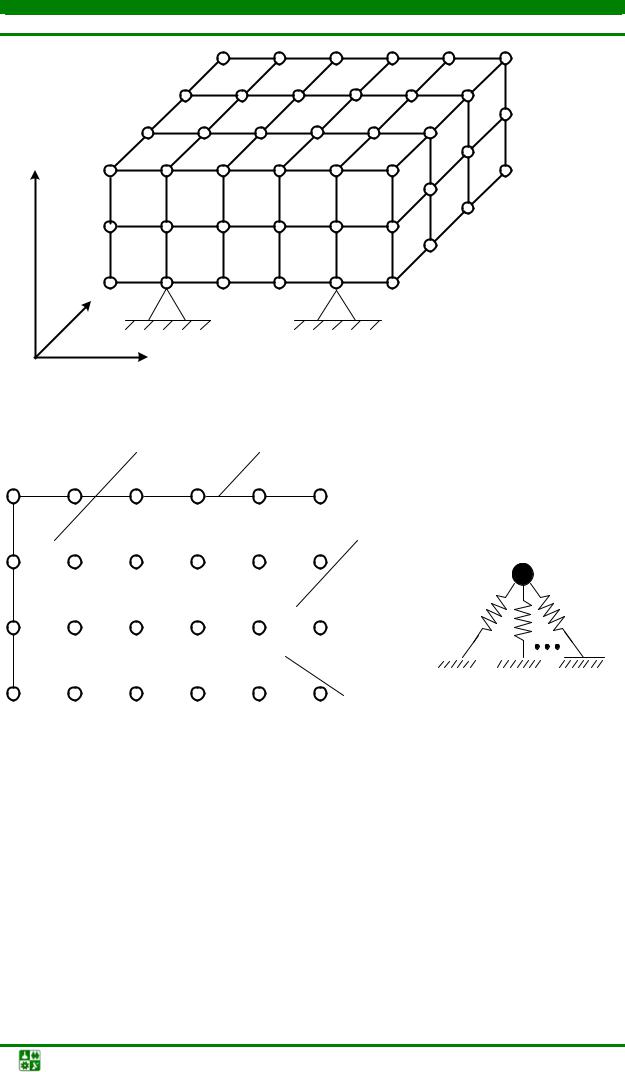
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
а
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
в |
||||||||||||||
Рис. 3.76. Пример механической модели блока: а – модель корпуса; б, в – учет в модели конструктивных узлов и элементов (Т1, ПУ1, ПУ2); г – частотная характеристика участка конструкции
Компьютерные технологии в приборостроении. Учеб. пособие |
-200- |
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
f
fраб |
f01 |
f02 |
fв fн
fН, fВ |
fраб |
г
Рис. 3.76. Окончание
С целью обеспечения необходимых значений механических характеристик ПУ1 и ПУ2 разработчиком могут вноситься следующие изменения
впроект:
1.Введение дополнительных точек крепления ПУ1 и ПУ2.
2.Переразмещение ЭРЭ на несущих конструкциях печатных узлов.
3.Введение дополнительных ребер жесткости.
4.Изменение размеров несущих конструкций печатных узлов.
5.Изменение способов крепления ЭРЭ к печатной плате с целью повышения жесткостных свойств конструкции печатного узла.
6.Локальное нанесение вибропоглощающих компаундов [22] и т. д.
Блок 3. На заключительном этапе алгоритма в случае длительных вибрационных нагрузок на блок решается задача по обеспечению усталостной прочности выводов ЭРЭ, установленных на ПУ1 и ПУ2. Поля виброускорений НК печатных узлов, полученные на предыдущем этапе алгоритма, определяют уровни переменных сил F(τ), действующих на ЭРЭ (рис. 3.77).
Компьютерные технологии в приборостроении. Учеб. пособие |
-201- |
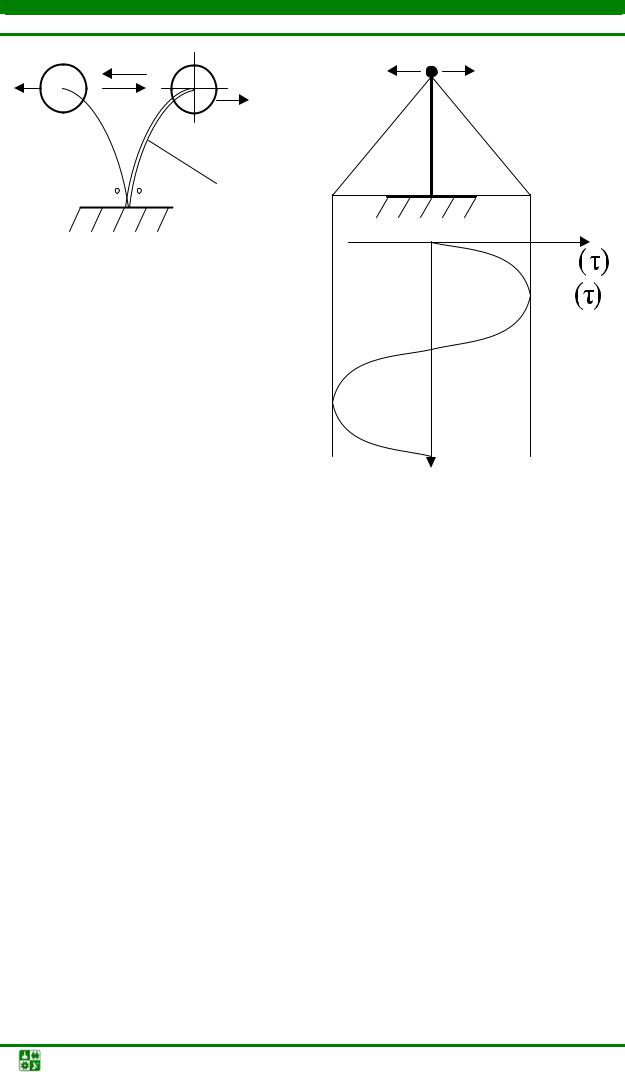
3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Рис. 3.77. Циклическое нагружение вывода ЭРЭ при вибрациях: а – условная схема колебаний ЭРЭ; б – эпюра изгибающих моментов М
Из рисунка видно, что при нагружении ЭРЭ вибрационные воздействия
с ускорением |
Am sin w к нему будет приложена переменная сила |
F ( ) Fm sin w |
(рис. 3.77, а), амплитуда которой Fm mAm . Максимальный |
изгибающий момент, как видно из эпюры на рис. 3.77, б, прикладывается в сечении вывода А – А’ и равен Mи( ) Fm sin w . Исходя из этого, в точках А
и A’ сечения вывода возникают закономерные растягивающие и сжимающие механические напряжения ( ) :
( ) |
Mи( ) |
Fm sin wτ |
, |
|
|||
|
Мb |
Mb |
|
где Mb – момент сопротивления изгибу поперечного сечения вывода ЭРЭ (для круглых выводов диаметром d Mb d 3 / 32 ).
C учетом Mb для круглых выводов можно записать как
( ) |
32Fm |
sin |
32mAm |
sin . |
|
|
|||
|
d3 |
d3 |
||
Компьютерные технологии в приборостроении. Учеб. пособие |
-202- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
Таким образом, механическое напряжение в сечении вывода ЭРЭ меняется по гармоническому закону с амплитудой m 10,186 mAm / d 3 .
Практика показывает [22], что при переменных напряжениях после некоторого числа нагружения может наступить поломка вывода ЭРЭ. Число циклов до разрушения зависит от величины m . Описанное выше явление
разрушения получило название усталости. С физической точки зрения причиной усталостных повреждений являются микротрещины, возникающие в наиболее натруженных сечениях выводов ЭРЭ, которые, в конечном счете, ведут к разрушению выводов.
Как правило, полагают, что процесс образования микротрещин при знакопеременных механических напряжениях связан с накоплением пластичных деформаций. Поэтому полагают, что усталостная прочность определяется только амплитудой m и не зависит от закона изменения m во вре-
мени и частоты колебаний. Путем многократных испытаний можно определить число циклов N, которое выдержит образец до разрушения в зависимости от величины m цикла. Точная зависимость для большинства металлов,
из которых изготавливают выводы ЭРЭ, имеет вид, представленный на рис. 3.78. Путем исследований можно определить значение m , при котором ма-
териал выводов ЭРЭ не разрушается при любом числе циклов. Такое напряжение называют пределом усталости и обозначают 1 . Для большинства
цветных металлов не удается установить число циклов, выдержав которое образец не разрушался бы в дальнейшем. Поэтому для таких металлов вводится понятие условного предела усталости, за который принимают значениеm , при котором образец способен выдержать 108 циклов.
Зависимость, представленную на рис. 3.78, можно с некоторым приближением описать математической моделью [17]:
|
|
|
при |
m 1, |
N( m) |
|
|||
2 106 |
при |
m 1, |
||
|
|
|
||
( |
1)8 |
|||
|
m |
|
|
|
где Nб = 2 106 – некоторое базовое число циклов, до которого обычно испытывают образцы из данного металла (для черных металлов Nб = 106–107; для
цветных металлов Nб = 2 108).
Тогда, вычислив величину амплитуды механического напряжения m и взяв отношение m  1 , можно по вышеописанной модели для m 1
1 , можно по вышеописанной модели для m 1
оценить число циклов механической нагрузки, которые выдержит вывод ЭРЭ при длительных вибрационных нагрузках. Если колебание вывода ЭРЭ происходит с частотой 2 f , то каждый цикл нагружения будет осуществ-
ляться за время периода колебаний Tk =1/f.
При этом число циклов до разрушения произойдет за время
Компьютерные технологии в приборостроении. Учеб. пособие |
-203- |

3.ИССЛЕДОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ПС СРЕДСТВАМИ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
3.3.Моделирование механических режимов
N
раз i 1Tki N Tk N / f .
Рис. 3.78. ЗависимостьчислацикловN изменениянагрузки отвеличинымеханическогонапряжения
Обеспечивая необходимые усталостные характеристики элементной базы ПУ1 и ПУ2, разработчик может изменить способы крепления ЭРЭ, так как длина выводов ЭРЭ значительно влияет на величину изгибающего момента вывода Mи (рис. 3.77, б). Кроме этого для снижения вибрационных на-
грузок на ЭРЭ разработчик может прибегнуть к мерам, применяемым на втором этапе алгоритма.
Компьютерные технологии в приборостроении. Учеб. пособие |
-204- |