

32) Момент силы относительно оси.
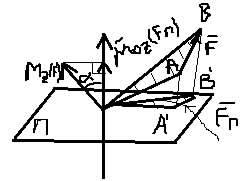
Момент силы относительно оси - проекция на эту ось момента силы относительно любой точки лежащей на оси.
| M0(F) | = 2*SΔOAB
( M0o(F) )z = 2*SΔOA'B'
S?OA'B' = SΔOAB*cosα
M0(F) = ±F*h - скалярный момент силы относительно оси.
Знак скалярного момента определяется так, если на встречу вектора момента поворот тела вокруг О против часовой стрелки, то момент положительный.
Момент силы относительно оси не зависит от выбора точки на оси.
( M0'(F) )z = ( M0(F) )z
Второе правило определения момента силы относительно оси: Момент силы относительно оси называется произведение проекции силы на плоскость перпендикулярную оси на плечо этой проекции относительно точки пересечения плоскости с осью.
Момент силы относительно оси Z: M0z(F) = ±hп * Fп
Частные случаи: момент силы относительно оси = 0.
а) Fп = 0

б) hп = 0 (сила пересекает ось)
Момент силы относительно оси = 0, если сила и ось находятся в одной плоскости.
Момент сил относительно декартовых осей координат (проекции момента силы на эти оси).
| i j k |
M0(F) = r * F = | x y z | = (y*Fz - z*Fy)*i + (z*Fx - x*Fz)*j + (x*Fy - y*Fx)*k = Mox(F)*i + Moy(F)*j + Moz(F)*k
| Fx Fy Fz |
Mox(F)=y*Fz - z*Fy
Moy(F)=z*Fx - x*Fz
Moz(F)=x*Fy - y*Fx
33) Связь векторного момента силы относительно точки с моментом силы относительно оси, проходящей через эту точку.
2*S(OA'B') = 2*S(OAB)*cosα
| Moz(F) | = | Mo(F) |*cosα
MCOO = проекции на эту ось векторному МСОТ
34) Аналитические выражения для моментов силы относительно осей координат.
Момент силы относительно оси - проекция на эту ось момента силы относительно любой точки лежащей на оси.
Момент сил относительно декартовых осей координат (проекции момента силы на эти оси).
| i j k |
M0(F) = r * F = | x y z | = (y*Fz - z*Fy)*i + (z*Fx - x*Fz)*j + (x*Fy - y*Fx)*k = Mox(F)*i + Moy(F)*j + Moz(F)*k
| Fx Fy Fz |
Mox(F)=y*Fz - z*Fy
Moy(F)=z*Fx - x*Fz
Moz(F)=x*Fy - y*Fx
Дополнение:
35) Пара сил. Теорема о сумме моментов сил, составляющих пару, относительно произвольной точки.
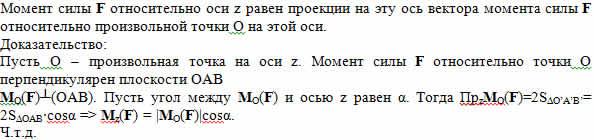
Пара сил - система двух сил равных по модулю и противоположных по направлению.
F1 = -F2
R* = F1 - F2 = 0
AC/F2 = BC/(R*) (стремится к бесконечности)
(F1,F2) не эквивалентны 0
Момент пары сил - произведение одной из сил на ее плечо.
M(F1,F2) = M12 = ±F1*d = ±F2*d
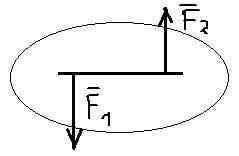
Векторный момент пары сил.
MA = AB * F2
MA = F2 * AB * sinα = F2d
MB = BA * F1 = F1 * d
M = MA = MB = S(ACBD)
Теорема о сумме моментов сил, составляющих пару, относительно произвольной точки: Сумма моментов сил, входящих в состав пары сил относительно любой точки не зависит от ее выбора и равна моменту этой пары сил.
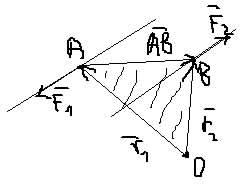
F1 = -F2
Mo(F2) + Mo(F1) = r2*F2 + r1*F1 = r2*F2 - r1*F2 = (r2 - r1)*F2 = AB * F2 = M(F1,F2)
36) Векторный и алгебраический моменты пары сил.
Алгебраический момент M=±F•d (пара). M=±dF1=±dF2=±2SΔABC= ±S. Он не меняется при перемещении сил вдоль линии их действия (ни плечо, ни направление вращения не меняются).
Векторный момент – вектор M=M(F,F’), направлен перпендикулярно плоскости пары в ту сторону, откуда видно стремление пары повернуть тело против часовой хода стрелки, его модуль равен алгебраическому моменту пары. M(F1,F2)=BAxF1=ABxF2.
Дополнение:
( + 32) Момент силы относительно оси )