46) Трение качения. Коэффициент трения качения.
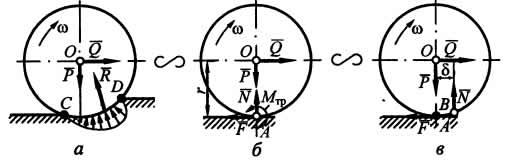
Абсолютно твердых тел, как и абсолютно гладких поверхностей, в природе не существует. Поэтому круглое тело (цилиндр, колесо), деформируясь, вдавливается в опорную поверхность. При качении цилиндр вдавливается в опорную плоскость и контактирует с ней по некоторой поверхности, которая в плоскости рисунка образует дугу CD, сдвинутую относительно вертикального диаметра цилиндра в направлении качения (рис. а). Полная реакция R опорной поверхности на цилиндр как сумма системы распределенных сил, вызванных деформацией поверхности, препятствует качению последнего. Это сопротивление, возникающее при качении одного тела по поверхности другого, условно называюттрением качения.
Определение
значений и направлений распределенных
сил представляет сложную задачу механики
деформируемого твердого тела. В инженерных
расчетах нас интересует момент
сопротивления качению (рис. б). Схематизируя
явление, будем рассматривать качение
по недеформируемой поверхности, а полную
реакцию R (см. рис. а) представлять в виде
двух составляющих, приложенных в точке
В, смещенной от точки А в сторону
возможного качения на некоторую величину
6 (рис. в). Сила F — сила трения скольжения,
а сила N — нормальная реакция, равная
по модулю силе нормального давления.
Из условия равновесия цилиндра (см. рис.
в) будем иметь: ![]() Произведение
Произведение ![]() называется
моментом сопротивления качению, или
моментом трения качения. Если сила Q
мала, то смещение силы N от вертикального
диаметра цилиндра также незначительно;
с увеличением Q это смещение возрастает.
Наконец, при Qmax цилиндр достигнет
предельного состояния равновесия и
нормальная реакция N будет отстоять от
вертикального диаметра на предельном
расстоянии
называется
моментом сопротивления качению, или
моментом трения качения. Если сила Q
мала, то смещение силы N от вертикального
диаметра цилиндра также незначительно;
с увеличением Q это смещение возрастает.
Наконец, при Qmax цилиндр достигнет
предельного состояния равновесия и
нормальная реакция N будет отстоять от
вертикального диаметра на предельном
расстоянии ![]() ,
которое называется коэффициентом
трения качения.
Выражают
,
которое называется коэффициентом
трения качения.
Выражают ![]() обычно
в сантиметрах. Коэффициент
обычно
в сантиметрах. Коэффициент ![]() зависит
от свойств материалов и состояния
поверхностей соприкасающихся тел,
определяют его опытным путем.
зависит
от свойств материалов и состояния
поверхностей соприкасающихся тел,
определяют его опытным путем.
47) Центр системы параллельных сил. Формула для радиус-вектора и координат центра системы параллельных сил.
На
каждую частицу тела, находящегося вблизи
поверхности Земли, действует направленная
вертикально вниз сила, которая
называется силой
тяжести.
Силы тяжести каждой частицы тела, строго
говоря, направлены по радиусам к центру
Земли и не являются параллельными. Но
для тел, размеры которых малы по сравнению
с размерами Земли, непараллельность
настолько незначительна, что в расчетах
с большой точностью силы тяжести их
частиц можно считать параллельными,
сохраняющими свои значения, точки
приложения и параллельность при любых
поворотах тела. Поэтому, обозначив силу
тяжести частицы через Рк , можно, согласно
формулам  и
и  ,
найти точку С, которая неизменно связана
с телом и называется центром
системы параллельных сил тяжести.
,
найти точку С, которая неизменно связана
с телом и называется центром
системы параллельных сил тяжести.
Таким
образом, центром
тяжести твердого тела называется
центр системы параллельных сил тяжести
частиц данного тела. Точка С — это
геометрическая точка, она может и не
принадлежать телу, но она всегда с ним
связана, например центр тяжести
баскетбольного мяча, кольца и др. Выразим
силу тяжести (вес) частицы тела через
ее объем V. Тогда величина ![]() называется удельным
весом,
а величина
называется удельным
весом,
а величина ![]() -
плотностью тела в данной точке.
("гамма"-Н/м3) ("ро"-Н*с2/м4).
-
плотностью тела в данной точке.
("гамма"-Н/м3) ("ро"-Н*с2/м4).
Для
частицы тела будем иметь ![]() .
Подставив эти соотношения в выражения
.
Подставив эти соотношения в выражения  и
и  ,
получим формулы для rc и координат центра
тяжести:
,
получим формулы для rc и координат центра
тяжести: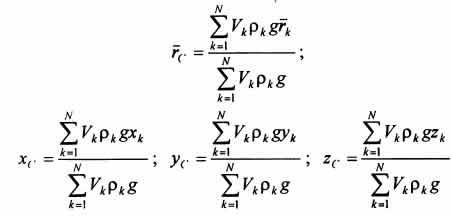
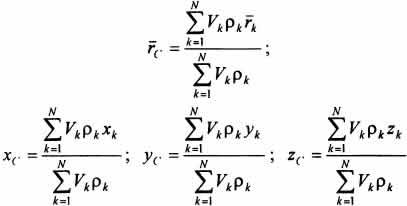
После сокращения на g эти выражения представляют собой соответственно радиус-вектор и координаты центра масс (центра инерции) тела.