29) Основные виды связей и их реакции.
Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу. Поверхности связей полагаем идеально гладкими, т.е. такими, в которых не возникают силы трения. Подобные связи называют идеальными.
1) Гладкая поверхность (плоскость). Реакция R в случае гладкой поверхности направлена по общей нормали к поверхностям связи и тела в точке их контакта и приложена к телу.
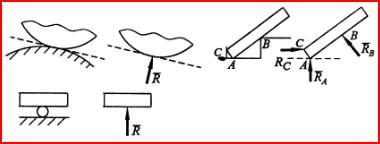
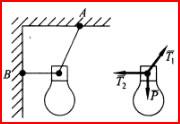
2) Нить. Этим термином обозначают цепи, тросы, канаты, которые могут воспринимать только силы растяжения. Нить считается гибкой и нерастяжимой. Реакция нити на тело направлена по касательной к нити в точке ее закрепления.
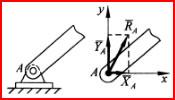
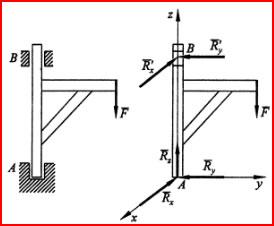
3) Цилиндрический шарнир (подшипник). Цилиндрический шарнир представляет собой цилиндрическую втулку, в которой находится ось вращения. Он не воспринимает осевой силы, его реакция находится в плоскости Axy, перпендикулярной оси шарнира. Реакция Ra может быть направлена по любому радиусу шарнира в плоскости Axy.
4) Сферический шарнир. Он позволяет телу поворачиваться, но не разрешает линейные перемещения. Реакция сферического шарнира R приложена к его центру и может быть направлена по любому радиусу шарнира.
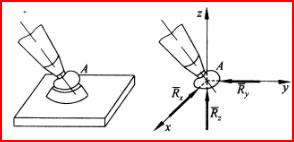
5) Подпятник. Он отличается от цилиндрического шарнира тем, что кроме радиальных сил может воспринимать и осевую силу. Реакция подпятника, как и реакция сферического шарнира, может иметь любое направление.
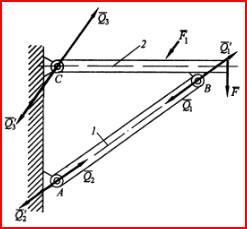
6) Невесомый стержень с шарнирами на концах. Реакция прямолинейного невесомого стержня с шарнирами на концах направлена вдоль оси стержня. В отличае от нити такой стержень может передавать как силы растяжения, так и силы сжатия.
30) Система сходящихся сил. Условия равновесия.
Систему сил, приложенных к твердому телу, называют системой сходящихся сил, если линии действия всех сил пересекаются в одной точке.
![]()
![]()
Система сходящихся сил эквивалентна одной равнодействующей силе, которую можно определить замыкающим вектором R* силового многоугольника, построенного на векторах-сипах системы сходящихся сил. Другими словами, равнодействующая системы сходящихся сил равна их геометрической сумме.
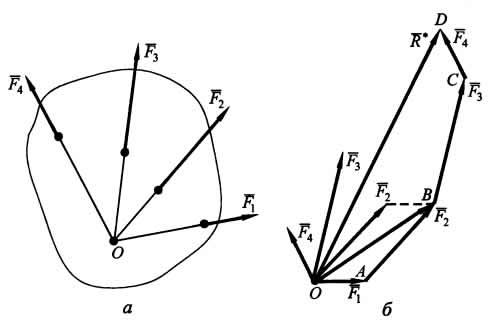
Многоугольник OABCD называется силовым многоугольником.
Условия равновесия системы сходящихся сил.
Так
как система сходящихся сил эквивалентна
одной равнодействующей, то тело под
действием такой системы сил будет
находиться в равновесии тогда, когда
равнодействующая равна нулю, т. е. силовой
многоугольник должен быть замкнут.
Условия равновесия в векторной и
аналитической форме имеют соответственно
следующий вид: 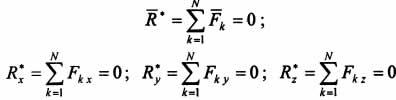 .
Данные равенства содержат заданные и
неизвестные величины. Их называют уравнения
равновесия.
.
Данные равенства содержат заданные и
неизвестные величины. Их называют уравнения
равновесия.
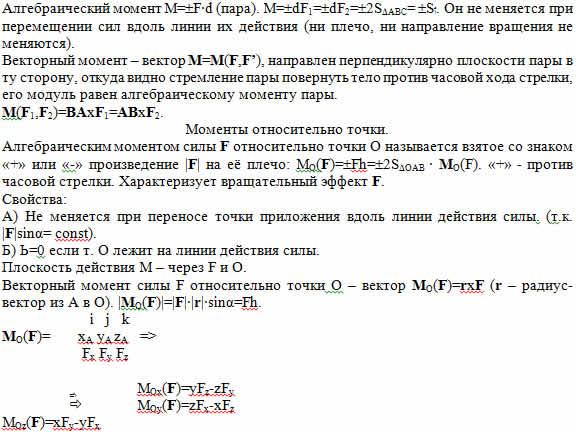
31) Алгебраический и векторный моменты силы относительно точки.
Момент силы относительно точки - называется вектор приложенный в этой точке и равный векторному произведению.
М0(F) = r*F
M0(F) перпендикулярен (r,F)
| M0(F) | = r*Fsin(r,F) = F*h (h - плечо силы) (Плечо силы - кратчайшее расстояние (по перпендикуляру) между моментом точки и линией действия силы)
L0 - главный момент системы сил относительно точки О.
Частный случай: если действует система сходящихся сил, то L0 = $M0(F)
Доказательство: L0 = $M0(F) = $(rк * Fк) = r * $Fк = r * (R*) = M0(R*)
M0(R*) = $M0(Fк)
(Другой ответ - немного странноват, но более подробный что ли)
Дополнение:
Теорема Вариньона - момент равнодействующий относительно какой-либо точки равен сумме моментов сил ее составляющих.