

С другой стороны , т.Е.

Поэтому
![]() ;
;
![]() ;
;
![]() ,
,
откуда
![]() ;
;
![]() ;
;
![]() .
.
Действительно
![]()

Очевидно,
что аналогичным образом, т.е., приравнивая
проекции угловой скорости
![]() ,
можно вывести ранее полученные выражения
для
,
можно вывести ранее полученные выражения
для
![]() ,
,
![]() и
и
![]() для случая, когда ветер отсутствует.
При этом нет необходимости выражать
проекции
для случая, когда ветер отсутствует.
При этом нет необходимости выражать
проекции
![]() и
и
![]() через производные скоростных углов
через производные скоростных углов
![]() и
и
![]() ,
так как при отсутствии ветра
,
так как при отсутствии ветра
![]() ,
,
![]() .
.
При отсутствии ветра относительно простые соотношения для определения скоростного угла крена могут быть получены и в конечной форме (т.е. - в виде алгебраического соотношения, а не дифференциального уравнения).
В общем случае для этого надо решать систему уравнений
![]() .
.
При
отсутствии ветра, т.е. когда
![]() ,
в этой системе
,
в этой системе
![]() остается одно неизвестное. Так как
остается одно неизвестное. Так как
![]()
 ,
,
то
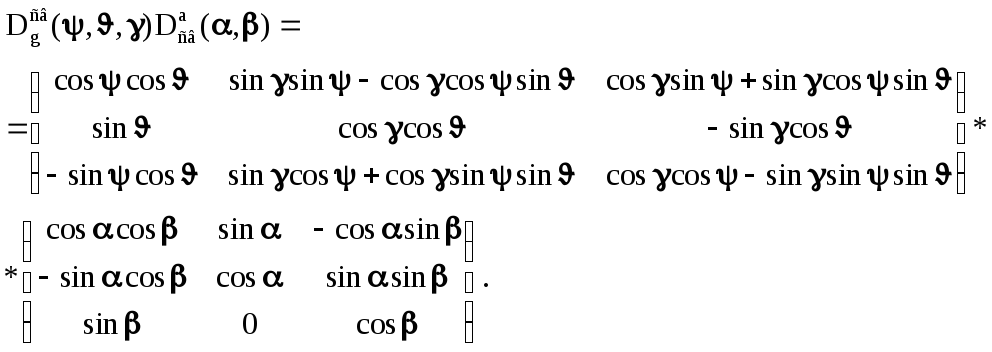
для определения
![]() достаточно найти лишь один из элементов
(второй или третий) второй строки
произведения матриц
достаточно найти лишь один из элементов
(второй или третий) второй строки
произведения матриц
![]()
Таким
образом, скоростной угол крена
![]() при отсутствии ветра можно найти из
равенства
при отсутствии ветра можно найти из
равенства
![]() ,
,
или
![]() .
.
Итак, если не учитывать ветер, то полная система уравнений пространственного движения ЛА приобретает вид
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
где нужные для нахождения сил и их проекций углы атаки и скольжения и скоростной угол крена определяются из соотношений
![]() ,
,
![]() ,
,
![]() ,
,
или
![]() ,
,
![]() ,
,
![]() ,
,
или
![]() ,
,
где
![]() ,
,
![]() .
.
Способы упрощения
1. Разделение движения на продольное и боковое.
2. Разделение на движение ЦМ (траекторное, поступательное) и вокруг ЦМ (угловое или вращательное).
3. Разделение движения на быстрое и медленное.
4. Разделение движения на опорное (невозмущенное) и возмущенное (с линеаризацией последнего).
Для
упрощенных уравнений предполагается
отсутствие ветра, поэтому везде далее
![]() .
.
Уравнения продольного движения, или движения в вертикальной плоскости
Продольным
называется движение, которое происходит
в одной и той же вертикальной плоскости,
причем плоскость симметрии ЛА совпадает
с этой вертикальной плоскостью. Другими
словами, при продольном движении
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
При этом из соответствующих уравнений пространственного движения ЛА следует:
![]() (из
(из
![]() при
при
![]() и
и
![]() );
);
![]() (из
(из
![]() при
при
![]() и
и
![]() );
);
![]() (из
(из
![]() при
при
![]() ,
,
![]() и
и
![]() );
);
![]() (из
(из
![]() при
при
![]() и
и
![]() );
);
![]() (из
(из
![]() при
при
![]() и
и
![]() ),
),
а оставшиеся уравнения приобретают вид
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Последнее равенство
следует из дифференциального уравнения
для угла атаки, которое в этом случае
принимает вид
![]() ,
с учетом того, что при
,
с учетом того, что при
![]() направления скорости и продольной оси
ЛА совпадают, т.е.
направления скорости и продольной оси
ЛА совпадают, т.е.
![]() .
Его можно получить и из конечного
соотношения для того же угла, которое
для продольного движения упрощается
до
.
Его можно получить и из конечного
соотношения для того же угла, которое
для продольного движения упрощается
до
![]() .
.
Как
правило, нормальную СК выбирают так,
чтобы
![]() .
Так как для продольного движения вектор
тяги должен лежать в плоскости симметрии,
то его обычно представляют в виде
.
Так как для продольного движения вектор
тяги должен лежать в плоскости симметрии,
то его обычно представляют в виде
 ,
где
,
где
![]() - угол тяги. Поэтому
- угол тяги. Поэтому
![]() ,
,
![]()
Кроме
того, должен отсутствовать (быть
пренебрежимо малым) гироскопический
момент, т.е.
![]() .
.
В результате система уравнений продольного движения приобретает вид
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Уравнения углового продольного движения в этой системе зависят от остальных переменных лишь через момент тангажа MRz = MRz(,V,H,…). Если скорость изменения параметров движения центра масс H, V, заметно меньше чем параметров углового движения z, , , то уравнения вращательного движения, можно рассматривать отдельно от остальных уравнений системы при фиксированных значениях H, V, . В этом случае угловое движение принято называть быстрым, или короткопериодическим, а движение центра масс - медленным, или длиннопериодическим. Такое разделение движений имеет место для многих типов ЛА. Основанием для этого является то, что силы, обеспечивающие изменение скорости ЛА, во многом определяются угловым положением аппарата.
При этих же условиях можно отдельно рассматривать и уравнения продольного движения центра масс (первые четыре). Правда, корректным такое рассмотрение будет лишь при установившихся (сбалансированных) режимах полета, когда параметры углового движения остаются постоянными. Условием этого является равенство нулю тангажного момента, т.е. уравнения продольного движения ЦМ надо решать совместно с уравнением MRz(,V,H,…) = 0, которое называется уравнением, или условием балансировки. Получающиеся из этого уравнения значения угла атаки называются балансировочными углами атаки. Очевидно, что в условиях реального полета под действием возмущений угол атаки будет все время меняться, поэтому рассматриваемое разделение предполагает идеальную работу системы стабилизации углового движения, поддерживающей значение угла атаки равным балансировочному. Такая идеальная работа, предполагающая нулевую установившуюся ошибку и малое время переходных процессов (по сравнению с темпом изменения параметров траекторного движения) с малыми перерегулированиями, возможна лишь при достаточно быстром угловом движении.