

Упрощенные уравнения движения ла
![]() Для
целей упрощения уравнения пространственного
движения аэродинамического ЛА удобно
представить в следующей форме
Для
целей упрощения уравнения пространственного
движения аэродинамического ЛА удобно
представить в следующей форме
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
![]() ,
,
![]() .
.
При этом ЛА рассматривается как твердое тело постоянной массы, движущееся относительно плоской и неподвижной Земли в стандартной атмосфере, а оси связанной СК являются главными центральными осями инерции.
В
этих уравнениях
![]() и
и
![]() - суммарные сила и момент, действующие
на ЛА. С учетом сделанных допущений
действующие на ЛА силы - это сила тяжести
ЛА
- суммарные сила и момент, действующие
на ЛА. С учетом сделанных допущений
действующие на ЛА силы - это сила тяжести
ЛА
![]() ,
тяга
,
тяга
![]() ,
и результирующая аэродинамическая сила
,
и результирующая аэродинамическая сила
![]() ,
т.е.
,
т.е.
![]() ,
где
,
где
 - результирующая сила. Эти составляющие
обычно естественным образом представляются
соответственно в скоростной
- результирующая сила. Эти составляющие
обычно естественным образом представляются
соответственно в скоростной
 ,
связанной
,
связанной
 и нормальной
и нормальной
 системах координат, поэтому используемые
в уравнениях проекции на оси траекторной
системы
системах координат, поэтому используемые
в уравнениях проекции на оси траекторной
системы

Суммарный
момент складывается из результирующего
аэродинамического
![]() ,
момента тяги
,
момента тяги
![]() (если вектор тяги не проходит через
центр масс ЛА) и гироскопического
(если вектор тяги не проходит через
центр масс ЛА) и гироскопического
![]() ,
причем в качестве последнего при
необходимости рассматриваются лишь
гироскопический момент от вращающихся
частей двигателей, который в проекциях
на оси связанной СК имеет вид
,
причем в качестве последнего при
необходимости рассматриваются лишь
гироскопический момент от вращающихся
частей двигателей, который в проекциях
на оси связанной СК имеет вид
 .
Здесь
.
Здесь
![]() - суммарный момент количества движения
всех вращающихся частей двигателя, а
ось вращения принимается параллельной
продольной оси ЛА.
- суммарный момент количества движения
всех вращающихся частей двигателя, а
ось вращения принимается параллельной
продольной оси ЛА.
Если
можно пренебречь ветром, т.е. считать,
что
![]() ,
то рассматриваемую систему уравнений
можно заметно упростить.
,
то рассматриваемую систему уравнений
можно заметно упростить.
Предположение
об отсутствии ветра существенно упрощает
выражения для проекций сил на оси
траекторной СК, так как в этом случае
оси ха
и хk
совпадают и траекторная СК отличается
от скоростной от лишь одним углом –
скоростным углом крена а
(чтобы избежать путаницы этот угол при
отсутствии
ветра часто обозначают с
,т.е., с
- это а
при
![]() ).
).
Поэтому
![]() ,
,
![]() ,
,
![]() ,
или
,
или
![]() ,
,
![]() ,
,
![]() ,
,
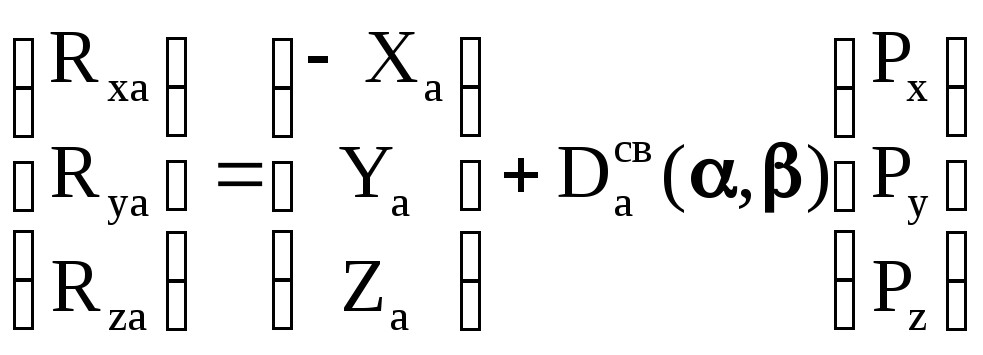
где
 ,
,
 ,
,
![]() - матрица перехода от нормальной СК к
скоростной при
- матрица перехода от нормальной СК к
скоростной при
![]() ,
и уравнения динамики
движения центра масс принимают вид
,
и уравнения динамики
движения центра масс принимают вид
![]() ,
,
![]() ,
, ![]() ,
,
или
![]() ,
,
![]() ,
,
![]() .
.
При отсутствии ветра можно также упростить соотношения для вычисления углов атаки и скольжения, от которых зависят аэродинамические силы и моменты:
![]() ,
,
![]() .
.
Кроме того, можно получить уравнения, непосредственно описывающие изменения углов атаки и скольжения:
![]() ,
,
![]() .
.
Две
первых формулы получаются непосредственно
из общих выражений для этих углов, если
учесть, что при
![]()

Откуда следуют вышеприведенные формулы для углов атаки и скольжения.
Уравнения
для производных углов атаки и с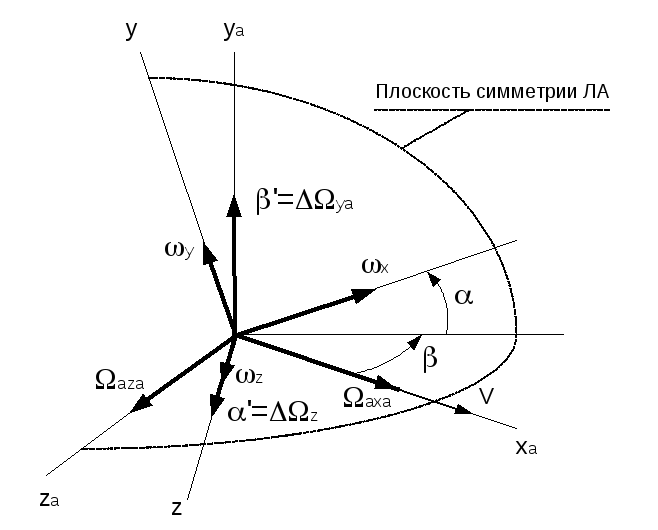 кольжения
можно получить, исходя из того, что углы
атаки и скольжения описывают поворот
связанной системы координат относительно
скоростной. Если угловую скорость
связанной СК относительно скоростной
обозначить
кольжения
можно получить, исходя из того, что углы
атаки и скольжения описывают поворот
связанной системы координат относительно
скоростной. Если угловую скорость
связанной СК относительно скоростной
обозначить
![]() ,
то в проекциях на оси скоростной СК
,
то в проекциях на оси скоростной СК
 ,
а на оси связанной СК
,
а на оси связанной СК
 ,
т.е.
,
т.е.
![]() ,
а
,
а
![]() .
.
Относительное
угловое перемещение этих систем можно
представить как разность вращений
связанной и скоростной систем координат
относительно нормальной СК, т.е. в виде
разности векторов
![]() ,
где
,
где
![]() - угловая
скорость связанной СК относительно
нормальной, а
- угловая
скорость связанной СК относительно
нормальной, а
![]() – угловая
скорость скоростной СК относительно
той же нормальной СК. Отсюда, воспользовавшись
матрицами перехода от скоростной системы
к связанной и обратно, можно получить
– угловая
скорость скоростной СК относительно
той же нормальной СК. Отсюда, воспользовавшись
матрицами перехода от скоростной системы
к связанной и обратно, можно получить
![]() ,
,
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() ,
-
проекции угловой
скорости
,
-
проекции угловой
скорости
![]() связанной СК
относительно нормальной на оси связанной
СК, а
связанной СК
относительно нормальной на оси связанной
СК, а
![]() ,
,
![]() ,
,
![]() – проекции
угловой скорости
– проекции
угловой скорости
![]() скоростной СК
относительно нормальной в скоростной
СК.
скоростной СК
относительно нормальной в скоростной
СК.
Если
предположить отсутствие ветра, т.е.
совпадение земной и воздушной скорости,
то нужные проекции угловой скорости
![]() можно получить,
составив уравнения динамики поступательного
движения на оси скоростной СК
можно получить,
составив уравнения динамики поступательного
движения на оси скоростной СК
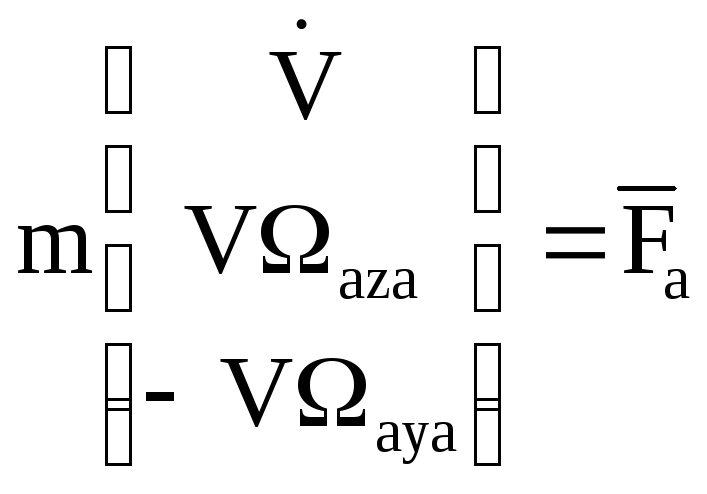 ,
или
,
или
![]() ,
,
![]() .
.
Следует
заметить, что эти уравнения имеют смысл
лишь при отсутствии ветра, так как только
в этом случае вектор
![]() определяет движение
скоростной СК относительно нормальной
земной СК.
определяет движение
скоростной СК относительно нормальной
земной СК.
Недостающую
проекцию
![]() можно определить непосредственно из
определения скоростной СК, так как
именно она соответствует повороту
вокруг вектора скорости, обеспечивающему
нахождение оси уа
в плоскости
симметрии ЛА при любом угловом движении
аппарата. Очевидно, что условие
принадлежности оси уа
плоскости
симметрии ЛА будет выполняться, если
проекция
можно определить непосредственно из
определения скоростной СК, так как
именно она соответствует повороту
вокруг вектора скорости, обеспечивающему
нахождение оси уа
в плоскости
симметрии ЛА при любом угловом движении
аппарата. Очевидно, что условие
принадлежности оси уа
плоскости
симметрии ЛА будет выполняться, если
проекция
![]() на плоскость симметрии равна сумме
проекций всех остальных угловых
скоростей, «участвующих» в относительном
угловом движении скорости и плоскости
симметрии (поворачивающих плоскость
симметрии и меняющих направление
скорости)
на плоскость симметрии равна сумме
проекций всех остальных угловых
скоростей, «участвующих» в относительном
угловом движении скорости и плоскости
симметрии (поворачивающих плоскость
симметрии и меняющих направление
скорости)
![]() ,
откуда
,
откуда
![]() .
.
Выполнив
соответствующие преобразования, можно
получить вышеприведенные выражения
для
![]() и
и
![]() :
:
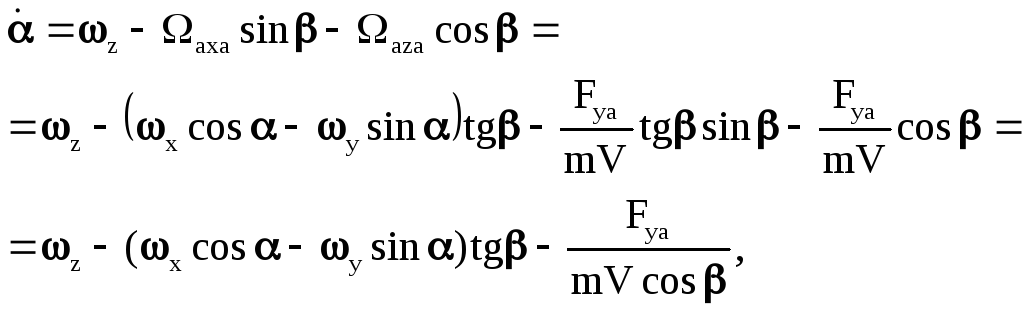
![]() .
.
Для
определения угла а
можно использовать равенство проекции
скорости
![]() и проекций скоростей
изменения
углов между
скоростной и нормальной СК
и проекций скоростей
изменения
углов между
скоростной и нормальной СК
![]() .
.
Так
как при отсутствии ветра
![]() ,
то
,
то
Следует отметить,
что хотя при учете ветра полученные
соотношения не выполняются, уравнения
относительно производных углов атаки,
скольжения и скоростного крена могут
быть получены и в этом случае. Однако
эти уравнения будут связывать указанные
производные с остальными производными
скоростных углов. Действительно,
используя углы между скоростной и
нормальной СК и записав все проекции
![]() на оси скоростной СК, получают следующую
систему уравнений
на оси скоростной СК, получают следующую
систему уравнений
![]() ;
;
![]() ;
;
![]() .
.