

7.2. Задание по работе
1. Снять экспериментальные зависимости σg и σФЛ от параметра САУ K (для функции передачи электронного интегратора использовать аппроксимацию вида K/jω, где K определяется параметрами частотно-зависимой обратной связи операционного усилителя).
2. Снять экспериментальную зависимость σΣ от параметра САУ K и определить значение KОПТ.
3. Построить графики всех зависимостей в одних координатных осях.
4. Привести расчетные соотношения и результаты вычислений значения KОПТ двумя способами.
5. Сопоставить результаты эксперимента с теоретическими сведениями. Подтвердить наличие корреляции процессов g(t) и v(t).
6. Построить семейство ЛХ и АЧХ САУ для нескольких значений параметра K (в том числе – для расчетного значения KОПТ).
7.3. Содержание отчета
1. Структурная схема исследуемой САУ.
2. Основные расчетные соотношения.
3. Экспериментальные зависимости по пп.1-4 задания.
4. Семейства ЛХ и АЧХ.
5. Выводы по результатам экспериментальных исследований.
7.4. Контрольные вопросы
1. С физической точки зрения объяснить влияние параметра K на уровень флюктуационной и динамической составляющих ошибки САУ.
2. Как вычисляется дисперсия суммы 2-х коррелированных случайных процессов?
3. Какой порядок астатизма имеет исследуемая система (рис.3) по выходу y(t)? по выходу ε(t)?
4. Оценить влияние параметра K на дисперсию случайного процесса y(t), если на вход САУ поступает только экспоненциально-коррелированный процесс g(t). Чему равна дисперсия y(t) при неограниченном росте K?
5. Как отражается улучшение фильтрующих свойств системы на корреляционных свойствах флюктуационной ошибки?
6. Какой должна быть структура САУ, согласованной с формирующим фильтром данного макета?
8. Исследование нелинейной сау
(лабораторная работа 7)*
Цель работы – ознакомление с практическим использованием методов гармонической и статистической линеаризации при анализе САУ, содержащей релейный элемент и инерционную линейную часть.
8.1. Описание лабораторной установки
Лабораторная установка содержит макет САУ, внешний генератор широкополосных случайных процессов и осциллограф. Исследуемая САУ (рис. 4) включает в себя нелинейный элемент типа реле с петлей гистерезиса и линейную часть, состоящую из электронного интегратора и цепей коррекции с функциями передачи z1(jω) и z2(jω).
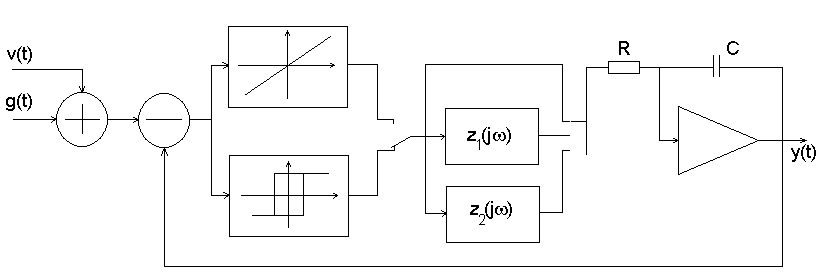
Рис.4
Схемы цепей
коррекции и их параметры приведены на
лабораторном макете. Нелинейный элемент
может выключаться. На вход САУ можно
подать скачкообразный сигнал g(t), а также
широкополосный случайный процесс v(t)
(с нулевым средним и спектральной
плотностью мощности
![]() ).
Уровень случайного процесса v(t) можно
менять. Выходной сигнал y(t) контролируется
с помощью осциллографа.
).
Уровень случайного процесса v(t) можно
менять. Выходной сигнал y(t) контролируется
с помощью осциллографа.
Метод гармонической линеаризации используется для анализа автоколебаний в нелинейной САУ. В ходе этого анализа необходимо ответить на следующие вопросы:
1) возможно ли возникновение автоколебаний в нелинейной САУ?
2) устойчив ли режим автоколебаний в случае их возникновения?
3) каковы параметры автоколебаний (амплитуда и частота)?
Условия возникновения автоколебаний в нелинейной САУ определяются решением уравнения замыкания
![]()
![]() ,
,
где
![]() -
эквивалентная функция передачи
нелинейного элемента;
-
эквивалентная функция передачи
нелинейного элемента;
![]() - амплитуда 1-й
гармоники на входе нелинейного элемента;
- амплитуда 1-й
гармоники на входе нелинейного элемента;
![]() - функция передачи линейной части
системы.
- функция передачи линейной части
системы.
Для исследуемого в макете САУ нелинейного элемента типа реле с петлей гистерезиса
![]() ,
,
где
![]() ;
;![]() ;
;![]() и
и![]() - параметры нелинейного элемента,
характеризующие размеры петли гистерезиса
для входного и, соответственно, выходного
процессов.
- параметры нелинейного элемента,
характеризующие размеры петли гистерезиса
для входного и, соответственно, выходного
процессов.
Эта функция передачи может быть представлена в виде
![]() ,
,
где
![]() .
Такая запись показывает, что амплитуда
1-й гармоники на выходе реле с петлей
гистерезиса такая же, как и на выходе
идеального реле. Однако имеется фазовый
сдвиг φ, обусловленный запаздыванием
срабатывания такого реле в сравнении
с идеальным.
.
Такая запись показывает, что амплитуда
1-й гармоники на выходе реле с петлей
гистерезиса такая же, как и на выходе
идеального реле. Однако имеется фазовый
сдвиг φ, обусловленный запаздыванием
срабатывания такого реле в сравнении
с идеальным.
Уравнение замыкания представляется в виде
![]()
и решается
графически. Для этой цели следует
построить годограф Найквиста линейной
части и годограф
![]() нелинейного элемента. Наличие точки
пересечения годографов является
признаком возможности возникновения
автоколебаний в нелинейной САУ.
Устойчивость автоколебаний проверяется
с помощью правила: режим автоколебаний
в системе устойчив, если точка на
годографе
нелинейного элемента. Наличие точки
пересечения годографов является
признаком возможности возникновения
автоколебаний в нелинейной САУ.
Устойчивость автоколебаний проверяется
с помощью правила: режим автоколебаний
в системе устойчив, если точка на
годографе![]() ,
соответствующая увеличению амплитуды,
не охватывается (в смысле критерия
устойчивости Найквиста) годографом
,
соответствующая увеличению амплитуды,
не охватывается (в смысле критерия
устойчивости Найквиста) годографом![]() .
.
Параметры
автоколебаний (амплитуда и частота)
определяются значениями соответствующих
аргументов годографов в точке пересечения,
однако для их определения необходимо
иметь явную зависимость от аргументов
функций
![]() и
и![]() .
Параметры автоколебаний можно также
определить экспериментально с помощью
осциллографа.
.
Параметры автоколебаний можно также
определить экспериментально с помощью
осциллографа.
Метод статистической
линеаризации используется для анализа
нелинейной САУ при воздействии на нее
шума. При этом нелинейный элемент
заменяется эквивалентным линейным
элементом с двумя коэффициентами
усиления: для регулярной составляющей
сигнала (математического ожидания)
![]() и центрированной случайной составляющей
сигнала
и центрированной случайной составляющей
сигнала![]() .
Для реле с петлей гистерезиса коэффициенты
.
Для реле с петлей гистерезиса коэффициенты![]() и
и![]() определяются с помощью выражений
определяются с помощью выражений
![]() ,
,
![]() ,
,
где
![]() и
и![]() - математическое ожидание (среднее) и
среднеквадратичное значение сигнала
на входе нелинейного элемента;
- математическое ожидание (среднее) и
среднеквадратичное значение сигнала
на входе нелинейного элемента;![]() - интеграл вероятности.
- интеграл вероятности.
Так как коэффициент
![]() зависит от
зависит от![]() ,
то и функция передачи линеаризованной
САУ
,
то и функция передачи линеаризованной
САУ![]() зависит от уровня шума. Поэтому изменение
зависит от уровня шума. Поэтому изменение![]() влияет на свойства нелинейной САУ.
влияет на свойства нелинейной САУ.