

4. Векторное управление асинхронным
ЭЛЕКТРОПРИВОДОМ
4.1. Основные понятия об обобщённой машине перемен-ного тока.
Асинхронный двигатель как объект управления предс-тавляет большую сложность, поскольку для его нормальной работы необходимо воздействовать на взаимосвязанные па-раметры (потокосцепление, момент). При этом возможен то-лько один канал управления - входное питание. Современ-ная теория электрических машин и электропривода ориенти-руется на обобщённую двухфазную модель машины, описывае-мую уравнениями для мгновенных значений в различных ор-тогональных системах [3]. Такой подход позволяет упрос-тить анализ характеристик электропривода, производить синтез её элементов и осуществлять векторное управление системами асинхронного электропривода.
Векторное управление основывается на использовании при управлении не скалярных величин управляемых коорди-нат электропривода, как это делается в системах постоян-ного тока, а векторных величин, имеющих определённое пространственное расположение. Причём управляемые коор-динаты электропривода, измеренные в неподвижной системе координат, преобразуются к вращающейся системе коорди-нат, в которой координаты электропривода рассматриваются как векторные величины. Из этих векторных величин, рас-положенных в виде проекций на вращающейся оси координат, путём координатных преобразований выделяются пропорцио-нальные им постоянные величины координат электропривода, которые и используются в качестве сигналов управления в системе электропривода. Обычно информацией для управле-ния служат данные о мгновенных значениях и пространст-венном положении вектора потокосцепления роторав возду-шном зазоре двигателя, а также мгновенных значений нап-ряжения и тока статора и скорости двигателя.
Дифференциальные уравнения для обобщённой машины записываются в различных системах координат: непо-движных относительно статора; d, q - неподвижных относи-тельно ротора; u, v - вращающихся с произвольной скорос-тью (наиболее общий случай). Можно было бы процессы в неподвижных элементах системы управления описывать не в двухфазной ортогональной системе координат, а в трёхфаз-ной системе A, B, C, но при этом САУ была бы не двух-, а трёхканальной, что менее экономично при одинаковой инфо-рмативности систем.
Дифференциальные уравнения могут быть записаны в векторной форме, если принять ось u за действительную, а ось v - за мнимую:

где U1, U2, i1, i2, 12 - напряжения, токи и по-косцепления обмоток статора и ротора, причём индекс 1 относится к цепям статора, а 2 - к цепям ротора; R1, R2, L1, L2 - активные сопротивления и индуктивности фазы об-моток статора и ротора; L12 - взаимная индуктивность ме-жду обмотками статора и ротора, и наоборот; - электри-ческая скорость вращения; М - электромагнитный момент машины; m - число фаз обмотки; Im - мнимая часть компле-ксного переменного; i2*- величина, комплексно сопряжён-ная величине i2; р - число пар полюсов машины.
Следует обратить внимание, что второй член в урав-нениях вектора потокосцепления системы (4.1) представ-ляет собой потокосцепление обмотки статора с потоком, создаваемым током i2, обтекающим обмотку ротора (12= =L12i2). Аналогично второй член в уравнении 21=L12i1 - потокосцепление обмотки ротора с потоком, создаваемым током i1, обтекающим обмотку статора.
Дифференцирование этих составляющих по частям в уравнениях 1 и 2 системы (4.1) даёт

Наличие второго члена в этих выражениях является непривычным, поскольку в обычных электрических цепях индуктивность - величина, независящая от времени. Однако в схемах электрических машин по самой природе ма-шин из-за относительных перемещений обмоток их индуктив-ности зависят от времени. То есть имеем дело с динами-ческой теорией цепей - теорией движущихся цепей, которая имеет дополнительное измерение, представляемое вторым членом выражений (4.2).
Система уравнений (4.1) может быть записана и в скалярной форме, если использовать проекции векторов всех переменных на оси u и v. Эти уравнения примут вид:

Уравнение электромагнитного момента (уравнение 3 в системе (4.1)) в зависимости от используемых переменных состояния машины может быть записано в различном виде. Для случая, когда в качестве переменных выбраны потоко-сцепления машины и токи статора и ротора используется три основных формы записи электромагнитного момента:
 Выражения
для проекции потокосцеплений:
Выражения
для проекции потокосцеплений:

Из общих уравнений обобщенной машины (4.3)-(4.5) можно легко перейти к уравнениям, записанным в любых координатах. Это обеспечивается выбором угловой скорости координатных осей. При описании электромеханических процессов, имеющих место в машинах переменого тока, используются, в основном, три значения скорости координатных осей: к=0;к=;к=о.
При к=0 запись уравнений осуществляется в непо-движных относительно статора осях .
Приэтом в уравнениях (4.3)-(4.5) вместо кподстав-ляется нуль, а индексы u, v, обозначающие оси u, v, за-меняются соответственно на .
При к= запись уравнений осуществляется в системе координат (d,q), неподвижной относительно ротора. При этом в уравнениях (4.3)-(4.5) вместо к подставляется , а индексы u, v соответственно заменяются на индексы d,q.
При к=оиспользуется запись в осях х, у, вращаю-щихся со скоростью поля статора. Уравнения (4.3)-(4.5) претерпевают следующие изменения: вместо кподставля-ется о, а индексы u, v заменяют на х, у.
Правильный выбор вектора переменной состояния маши-ны, относительно которого производится ориентирование системы координат, позволяет существенно упростить диф-ференциальные уравнения электрической машины и синтез системы регулирования [11].
Так, например, при синтезе системы ТПЧ-АД с автоно-мным инвертором напряжения целесообразно координатную систему х, у ориентировать относительно результирующего вектора напряжения, а с автономным инвертором тока - от-носительно вектора тока статора.
4.2. Преобразование трёхфазных сигналов переменного тока в двухфазные и двухфазных сигналов неподвижной сис-темы в сигналы подвижной системы координат.
Переход от обобщённой машины, для которой записаны уравнения (4.2)-(4.5), к реальной трёхфазной асинхронной машине осуществляется с помощью уравнений координатных преобразований и замены параметров обобщённой машины ре-альными фазными значениями параметров асинхронного дви-гателя [3].
Координатные преобразования уравнений реальной ма-шины к уравнениям обобщённой называются прямыми, а нао-борот - обратными. Формулы координатных преобразований получаются при условии постоянства мощности обеих машин. Они вводятся для любых переменных, записанных в любых осях.
В основу преобразований положено представление реальных переменных трёхфазной машины в виде векторов и разложения их на сумму проекций по осям .
Уравнения для прямого преобразования будут иметь вид [12]:

где kс-согласующий коэффициент, обеспечивающий вы-полнение инвариантности мощности при преобразовании пе-ременных.
Для наиболее распространённого на практике случая, когда переменная трёхфазной машины (например, токи фаз статора) подчиняются условию i1А+i1B+i1С=0, уравнения (4.6) для токов преобразуются к виду

Перменные X2d, X2q для роторной цепи двигателя по-лучают из вышеуказанных уравнений (4.6) и (4.7) путём замены соответствующих индексов.
Обратное преобразование сигналов двухфазной системы в сигналы трёхфазной выполняются по уравнениям:
![]()

Аппаратная реализация преобразующих устройств не вызывает затруднений, они могут быть построены на сумми-рующих усилителях, в качестве которых используются уси-лители типа К531УД1, К140УД8 и т.п. На рис. 4.2 приведе-ны схемы преобразований сигналов, соответствующих прямому преобразованию сигналов трёхфазной системы в сигналы двухфазной (рис. 4.2,а) и обратному преобразова-нию сигналов двухфазной системы в сигналы трёхфазной

a) б)
Рис.4.2. Принципиальные схемы преобразователей
сигналов.
(рис. 4.2,б).
Операционые усилители А1 и А2 (рис. 4.2,а) обеспе-чивают суммирование (преобразование) сигналов UA, UB, UC,с фазовым сдвигом 2/3. Результирующие сигналы U, U имеют фазовый сдвиг /2. Схема, приведённая на рис. 4.2,б обеспечивает преобразование (суммирование) с помощью операционных усилителей А1 - А3 исходных сигна-лов U, Uс фазовым сдвигом /2 в сигналы UA, UB, UC с фазовым сдвигом 2/3. Точность преобразования сигналов зависит от соблюдения равенства проводимостей цепей, подключенных к инвертиртирующему и неинвертиртирующему входам операционного усилителя. Номинал сопротивления R выбирается в диапазоне (10...100) кОм.
4.3. Анализ и синтез систем векторного управления.
Для реализации векторного управления и синтеза сис-темы электропривода ТПЧ-АД с короткозамкнутым ротором дифференциальные уравнения приведённого асинхронного двигателя записываются в ортогональной системе координат х, y, вращающейся со скоростью к=о', при этом ось х координатной системы сориентирована по направлению ре-зультирующего вектора потокосцепления ротора 2. Иными словами, координатная система вращается в пространстве со скоростью потокосцепления ротора, за которую и прини-мается скорость поля ротора о. При этом 2x=2;2y=0.
Уравнения (4.3) и (4.4) для данного случая примут вид

где U1x, U1y, i1x, i1y,- составляющие напряжения и тока статора двигателя по осям х и y; 2 - модуль резу-льтирующего вектора потокосцепления ротора;2о'о - круговая частота вращения ротора относительно поля ротора.
Из анализа записанных уравнений (4.9) прослежива-ется их подобие уравнениям двигателю постоянного тока. Так, например, момент двигателя пропорционален магнит-ному потоку (потокосцеплению 2) и току статора (i1y) (в двигателе постоянного тока момент пропорционален и I2). Идентичность уравнений асинхронной машины с машиной постоянного тока позволяет строить системы ТПЧ-АД подоб-но системам электропривода постоянного тока, однако при этом управлять не реальными переменными двигателя, а преобразованными к вращающимся осям, ориентированным по магнитному полю двигателя. При этом в системе управления используются не переменные синусоидальные величины, а преобразованные их постоянные значения. В таких системах появляется возможность раздельно управлять магнитным по-током, моментом, скоростью двигателя. Кроме того, воз-можность компенсации нелинейностей АД и его внутренних обратных связей при векторном управлении АД позволяет использовать методы подчинённого регулирования, получивших широкое распространение в электроприводах постоянного тока.
Реализация асинхронного электропривода с векторным управлением рассмотрим на примере системы "Трансвектор", разработанной фирмой "СИМЕНС", в которой в наиболее пол-ном виде отражаются принципы векторного управления. Фун-кциональная схема системы показана на рис. 4.3.
В качестве управляемого преобразователя в системе использован преобразователь частоты с непосредственной связью НПЧ. Система регулирования выполнена трёхконтурной, с внутренними контурами регулирования активной (i1х) и реактивной (i1y) cоставляющих тока статора. Каждый контур регулирования имеет собственный регулятор АА1 и АА2. Два внешних контура регулирования потокосцеп-ления с регулятором Аи скорости с регулятором АR обеспечивают два независимых канала регулирования.
Информационная часть системы состоит из датчика мгновенного значения тока статора UA и датчика потоко-сцепления ротора U. Измерение тока статора осуществля-ется в двух фазах A и B, сигналы, пропорциональные изме-
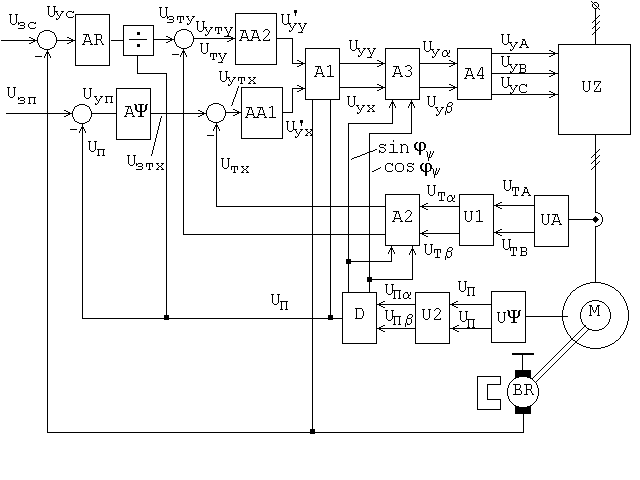
Рис. 4.3. Функциональная схема системы асинхронного
электропривода с векторным управлением.
ряемым токам i1А и i1В снимаются с выхода датчика UTA и UTВ.Эти сигналы с помощью координатного преобразователя U1, аналогичного приведённому на рис. 4.2,а, преобразу-ется в сигналы, пропорциональные этим токам, в ортогона-льной неподвижной системе координат (сигналы UТ, UТ). Построение координатного преобразователя осущест-вляется в соответствии с уравнениями прямых координатных преобразований (4.7)
UТ = UТА; UТ= (UТА + 2UТB)/3.
В качестве датчика потокосцепления ротора исполь-зуются датчики Холла, помещённые в воздушный зазор дви-гателя, которые измеряют мгновенные значения потокосцеп-ления ротора от тех же фаз А и В (2А и 2В). Сигналы с выхода датчика потокосцепления UПА и UПB, пропорциональ-ные величинам потокосцепления соответствующих фаз, в ко-ординатном преобразователе U2, преобразуются в сигналы UП и UП, пропорциональные потокосцеплениям, записанным в неподвижной системе координат ,, в соответствии с уравнениями координатных преобразований (4.7)
2=2A;2=(2A + 22B)/3.
Аппаратная реализация координатного преобразователя U2 ничем не отличается от преобразователя U1.
Сигналы с координатного преобразователя U2 подаются на координатный индикатор, основное назначение которого в определении угла п между вектором потокосцепления 2; и неподвижными осями статора ,. Этот угол необходим для преобразования полученных величин UТ, UТ, UП, UПк системе координат x, y, ориентированных по полю двигателя. Определение угла п осуществляется с помощью двух операций: выделение модуля и деления. Выделение мо-дуля потокосцепления 222+22 в виде сигнала UпUп2+Uп2 позволяет однозначно определить вектор пото-косцепления ротора во вращающейся системе координат x,y.
Аппаратная реализация блока вычисления модуля осно-вывается на использовании четырёхквадратного аналогового перемножителя типа КМ525ПС3 и операционного усилителя [13]. Принципиальная схема блока вычисления модуля при-ведена на рис. 4.4.

Рис. 4.4. Принципиальная схема блока вычисления
модуля.
Операцией деления в индикаторе в индикаторе D опре-деляются сигналы, пропорциональные sin п = UП/UП и cosп = UП/UП, вычисляемая в соответствии с формулами sin п = 2/2 и cos п = 2/2. Принципиальная схема блока деления показана на рис.4.5.

Рис. 4.5. Принципиальная схема блока деления.
Сигналы, пропорциональные активной i1х = i1cosп+ +i1cosп и реактивной i1y=i1cosп - i1sinп состав-ляющим тока статора UТх и UТy формируются в устройстве векторного поворота А2 в соответствии с формулами UТх= =UТ cosп + UТ sinп; UТy =UТ cosп - UТ sinп. Эти сигналы используются в качестве сигналов обратных свя-зей внутренних контуров тока во вращающихся координатах x, y. Один из вариантов реализации устойства векторного поворота приведён на рис. 4.6.

Рис. 4.6. Принципиальная схема устройства
векторного поворота.
Сигналами задания токов статора в осях x, y (Uзтх, Uзтy) являются выходные сигналы регуляторов потокосцеп-ления А и скорости АR, на входах которых происходит алгебраическое суммирование сигналов задания потокосцеп-ления и скорости с сигналами обратных связей Uуп = Uзп - -Uп; Uус = Uзс - Uс, где Uп и Uс - значения сигналов обратных связей по потокосцеплению и скорости, пропорциональные, соответственно, модулю потокосцепления ротора 2 и скорости ротора .
Выходные сигналы регуляторов тока АА1 и АА2, ис-пользуемые в качестве сигналов управления ТПЧ, вначале подаются на блок развязки А1, где преобразуется в соот-ветствии с первыми двумя уравнениями системы (4.9), что обеспечивает исключение взаимного влияния контуров регулирования составляющих тока i1х и i1y.
С выхода блока А1 управляющие сигналы Uуx и Uуy, выраженные во вращающейся системе координат x, y в ус-тройстве векторного поворота А3 превращаются в управля-ющие сигналы в неподвижной системе координат , в со-ответствии с уравнениями
Uу=Uуxcosп - Uуy sinп; Uу =Uух sinп + Uуy cosп.
В качестве устройства векторного поворота А3 может быть использовано устройство, аналогичное А2.
Далее сигналы управления Uу и Uу в устройстве преобразования координат А4 преобразуется в сигналы уп-равления ТПЧ в трёхфазной системе координат UуА, UуB, UуC в соответствии с формулами обратного преобразования UуА=Uу ; UуB= 0,5(-Uу + 3 Uу); UуС= -0,5(Uу +3 Uу). Принципиальная схема такого преобразователя приведена на рис. 4.2,б.
Предполагая, что ТПЧ описывается инерционным зве-ном первого порядка, т.е.

где Кпч - коэффициент передачи ТПЧ; Тпч - постоян-ная времени ТПЧ.
Записывая (4.10) в операторной форме, получим пере-даточную функцию ТПЧ по координатным осям x, y:

При записи выражений (4.10) и (4.11) полагалось, что коэффициенты передачи устройства векторного поворота А3 и устройства преобразования координат А4 имеют еди-ничное значение.
При записи передаточной функции АД установим вначале связь между напряжениями U1x, U1y и токами i1x, i1x статора. Для этого из третьего и четвёртого уравне-ний системы (4.9) определим

и подставим полученное значение в первые два урав-нения системы (4.9)

где Rэ= R1 + R2'(L122/L22) - эквивалентное сопро-тивление; Lэ=L1-(L122/L2) - эквивалентная индуктивность цепи статора двигателя.
Учитывая вышепринятое допущение, что в блоке раз-вязки А1 обеспечивается компенсация взаимовлияния то-ковых контуров, т.е. составляющих R2'(L12/L22)2; L1i1yo'; (L122/L2)i1yo' и L1i1хo'; (L122/L2)i1хo' в правых частях уравнений (4.13), а также пренебрегая вну-тренней обратной связью по ЭДС двигателя, которая учиты-вается членом (L12/L22)2o' , получим следующие уравне-ния

В данном случае передаточные функции АД по коорди-натным осям x, y примут вид

где Тэ= Lэ/Rэ - эквивалентная электромагнитная по-стоянная времени статора АД.
Используя третье уравнение системы (4.9) L12i1х= =2+Т2(d2/dt), где через Т2 = L2/R2' - обозначена элек-тромагнитная постоянная времени цепи ротора, запишем пе-редаточную функцию звена, преобразующего ток статора i1х в потокосцепление:

Передаточную функцию, устанавливающую связь между моментом двигателя, потокосцеплением ротора 2 и током статора, получим, используя пятое уравнение системы (4.9):

Выражение 2(р)I1y - реализуется с помощью блока произведения. Используя уравнение движения электропри-вода, связывающего момент двигателя со скоростью

Структурную схему системы электропривода ТПЧ-АД при векторном управлении можно изобразить в виде, показанном на рис.4.7.
Как видно из структурной схемы, она аналогична структурной схеме электропривода постоянного тока с двухфзонным регулированием скорости. Контур регулирования потокосцепления независим от контура регулирования скорости. Синтез регуляторов производится при настройке контуров на технический оптимум при выборе Т/Тпч. При этом передаточные функции регуляторов тока по осям x и y будут иметь вид

Рис. 4.7. Структурная схема ТПЧ-АД при векторном
управлении.

где Кт = Ктх = Ктy;
регулятора потокосцепления

регулятора скорости по управляющему воздействию при Mc=0

Регуляторы составляющих тока статора, потокосцеп-ления имеют пропорционально-интегральный вид, а регуля-тор скорости - пропорциональный. Для компенсации дейс-твия произведения 2i1y на выходе регулятора скорости включён блок деления, обеспечивающий деление напряжения задания тока Uзтy на напряжение обратной связи по пото-косцеплению ротора Uп.
Механическая характеристика привода при используе-мом пропорциональном регуляторе скорости будет обладать статической ошибкой. Для придания контуру регулирования скорости астатических свойств, последний должен быть на-строен на симметричный оптимум (ПИ-регулятор скорости). Форсирующее действие регулятора скорости, как и в элек-троприводе постоянного тока, может быть скомпенсировано включением на входе регулятора апериодического звена AJ.
В динамических режимах система обеспечивает харак-теристики, качественно не отличающиеся от характеристик электроприводов постоянного тока, и даже с большим быс-тродействием за счёт более высокой перегрузочной спо-собности и меньшего момента инерции АД по сравнением с двигателем постоянного тока. К недостаткам такой системы следует отнести сложность технической реализации, обу-словленную необходимостью настроек многочисленных нели-нейных блоков системы.