

2. Асихронный электропривод с импульсным
РЕГУЛИРОВАНИЕМ СОПРОТИВЛЕНИЯ РОТОРНОЙ ЦЕПИ.
2.1. Анализ работы импульсного регулятора сопротив-ления.
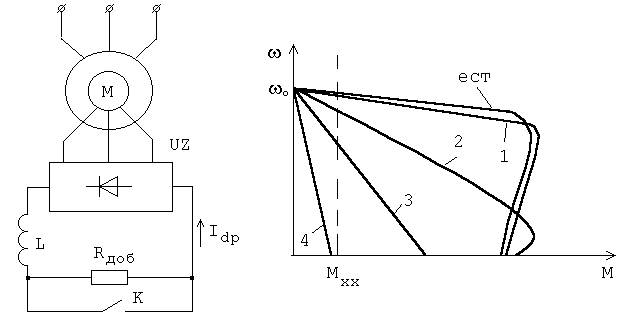
Схема, поясняющая принцип импульсного регулирования сопротивления роторной цепи асинхронного двигателя, обе-спечивающего, в конечном итоге, регулирование скороcти двигателя приведена на рис. 2.1.
 a)
б)
a)
б)
Рис. 2.1. Схема и механические характеристики АД при
импульсном регулировании сопротивления роторной цепи
Для уменьшения массогабаритных показателей добавоч-ного сопротивления Rдоб и упрощения схемы управления, Rдоб обычно включается в цепь выпрямленного тока ротора. Величина соротивления цепи ротора изменяется импульсным методом с помощью коммутатора К, шунтирующего резистор Rдоб. При замкнутом ключе К коммутатора из цепи ротора выведено дополнительное сопротивдение R1, чему соответс-твует механическая характеристика 1, близкая к естест-венной характеристике двигателя. Отличие характеристики 1 от естественной (ест, рис. 2.1,б) обусловлено наличием в роторной цепи собственного эквивалентного сопротивле-ния неуправляемого выпрямителя UZ и сопротивления сгла-жи-ва-ющего дросселя L.
Если ключ К включать и отключать с определённой до-статочно высокой частотой fк= 1/Tк, то выпрямленный ток idp, пропорциональный фазному току ротора i2, будет ко-лебаться около некоторой средней величины Idр, не дости-гая при этом своих установившихся значений (рис.2.2.) Амплитуда колебаний тока зависит от частоты коммутации fк и величины суммарной индуктивности выпрямленной цепи ротора Ld (чем больше частота и индуктивность, тем мень-ше амплитуда колебаний). В промышленных приводах частота коммутации устанавливается постоянной на уровне (200...500)Гц. Величина индуктивности Ld выбирается в зависимости от желаемого уровня пульсаций тока ротора (0,02...0,05)Idpн.
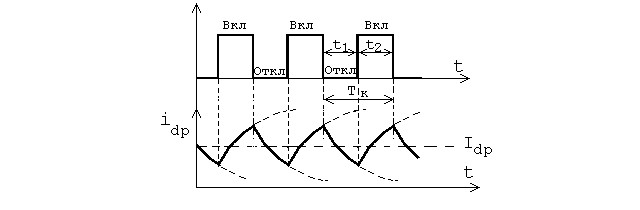 Рис.
2.2. Диаграмма работы коммутатора.
Рис.
2.2. Диаграмма работы коммутатора.
Среднее значение выпрямленного тока ротора Idp, ко-торое определяет момент двигателя при данном скольжении, зависит от скваженности (относительной продолжительности включения) процесса коммутации ключа К = t1/Tк. Чем больше скваженность, то есть чем больше время замкнутого состояния ключа К на периоде коммутации Тк, тем больше среднее значение тока Idp.
Таким образом, периодически замыкая и размыкая ключ коммутатора с определённой частотой fк и регулируемой скваженностью , можно, если пренебречь пульсациями, плавно изменять сопротивление роторной цепи.
Принципиальная схема силовой части асинхронного электропривода с импульсным регулированием выпрямленного тока ротора приведена на рис. 2.3. В цепи ротора двига-теля включён неуправляемый выпрямитель UZ, собранный по

Рис. 2.3. Схема импульсного регулирования выпрям-
ленного тока ротора.
трёхфазной мостовой схеме. Цепь выпрямленного тока рото-ра содержит дроссель L и добавочный резистор Rдоб, пери-одически шунтируемый тиристором VS1 тиристороного комму-татора.
Работа тиристорного коммутатора происходит следующим образом. При подаче управляющего импульса на вспомогате-льный коммутирующий тиристор VSк, он открывается, и про-исходит заряд коммутирующего конденсатора Ск выпрямлен-ным током выпрямителя UZ полярностью, показанной на ри-сунке. По окончании процесса заряда весь выпрямленный ток idp протекает через резистор Rдоб. Тиристор VSк зак-рывается (напряжение между анодом и катодом его имеет отрицательную полярность). Если теперь подать управляю-щий импульс на тиристор VS1, то он откроется (полярность напряжения, прикладываемая к электродам анод - катод, имеет положительный знак). Резистор Rдоб будет зашунти-рован. Ток ротора из-за наличия индуктивности роторной цепи нарастает по экспоненциальному закону. Происходит колебательный перезаряд конденсатора Ск через диод VDк и дроссель Lк полярностью, показанной на рис. 2.3. в скоб-ках. При повторном открывании VSк это напряжение прикла-дывается положительным потенциалом к катоду тиристора VS1, что приводит к его закрыванию. Выпрямленный ток ро-тора спадает по экспоненциальному закону. Происходит вновь колебательный перезаряд конденсатора Ск через дроссель Lк и диод VD1 полярностью, показанной на рис.2.3 без скобок. Далее цикл повторяется.
Если электропривод длительное время работает на полной скорости, когда тиристор VS1 открыт, то конденса-тор Ск должен достаточно долго сохранять свой заряд для последующего гашения тиристора VS1. Поскольку время сох-ранения полного заряда конденсатора ограничено, в ком-мутатор введена цепь подзаряда конденсатора. Подзаряд конденсатора осуществляется от дополнительного выпрями-теля UZк через цепь, образованную Ск-VS1-Lк-Rк-UZк. Ре-зистором Rк устанавливается требуемая величина зарядного тока.
Открытому состоянию тиристора VS1 cоответствует ме-ханическая характеристика 1 на рис.2.1,б, закрытому - 4. Соотношение открытого и закрытого состояния определяет скважность процесса коммутации и вид механической ха-рактеристики. При постоянной скважнности 0<<1 получа-ется характеристики типа 2 или 3 на рис. 2.1,б, причём 2>3.
Среднее значение импульсного регулируемого сопро-тивления Rd линейно зависит от скважнности [8]
Rd= Rдоб(1-) (2.1) и определяет среднее значение выпрямленного тока ротора:
Idp= EdoS/(Rэ+ Rd); (2.2) где Edo - среднее значение выпрямленной ЭДС ротора при его неподвижном состоянии; S - скольжение; Rэ - эквива-лентное сопротивление цепи выпрямленного тока ротора
Rэ=(S m Xд/2)+ 2Rд; (2.3) где Хд= Х2+ Х1' - индуктивное сопротивление фазы двига-теля, приведённое к цепи ротора; Х2 - индуктивное сопро-тивление фазы ротора; Х1'= Х1/Kе2 - индуктивное сопроти-вление фазы статора, приведённое к ротору; Rд= R2+ R1'- активное сопротивление фазы двигателя; R2 - активное со-противление фазы ротора; R1'= R1/Kе2 - активное сопроти-вление фазы статора, приведённое к ротору; Kе - коэффи-циент трансформации двигателя; m - пульсность выпрямите-ля (для мостовой схемы m = 6).
Сопротивление Rдоб выбирается исходя из обеспечения возможности регулирования скорости во всём диапазоне из-менения нагрузок. В частности, его можно выбрать таким, чтобы начальный пусковой момент на характеристике 4 был меньше момента холостого хода Мхх (рис. 2.1,б).
Если же в связи с особенностями производственного механизма (например, при активном моменте нагрузки) на-личие "мёртвой зоны", где невозможно регулирование ско-рости (участок между характеристикой 4 и осью ординат на рис. 2.1,б), недопустимо, то последовательно с резисто-ром Rдоб можно включить конденсатор С1, как это показано на рис. 2.3. пунктирной линией. При полном заряде кон-денсатора С1 и закрытом тиристоре VS1 ток в цепи ротора будет равен нулю, то есть граничная механическая харак-теристика будет совпадать с осью ординат, "мёртвая зона" будет отсутствовать. Параметры элементов, составляющих схему коммутатора (величины сопротивлений, индуктивнос-тей, ёмкостей) определяются исходя из обеспечения качес-твенного процесса коммутации. Выбор элементов производи-тся после анализа электромагнитных переходных процессов в цепи ротора, который позволяет расчитать максимальные значения напряжений и токов для всех элементов роторной цепи.
Один из вариантов схемы управления тиристорным ком-
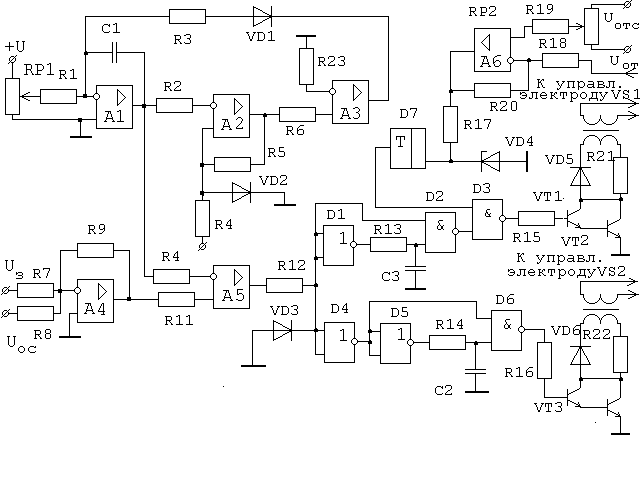 Рис.
2.4. Схема управления тиристорным
коммутатором
Рис.
2.4. Схема управления тиристорным
коммутатором
мутатором приведён на рис. 2.4. Она состоит из пяти
основных узлов: генератора пилообразных импульсов, ком-паратора, детектора фронта, формирователя и узла токоог-раничения. Диаграммы напряжений схемы показаны на рис. 2.5.
Генератор пилообразного напряжения построен на трёх операционных усилителях А1, А2, А3 и вырабатывает напря-жение Uоп, показанное на рис. 2.5. Наклон кривой пилообразного напряжения определяется ёмкостью конденса-тора С1, сопротивлением R1 и величиной наряжения Uп. Пе-риод колебаний генератора задаётся операционным усилите-лем А2 и величиной прямого падения напряжения на диоде VD2.
Операционный усилитель А4 используется в качестве суммирующего усилителя сигнала задания и обратной связи.
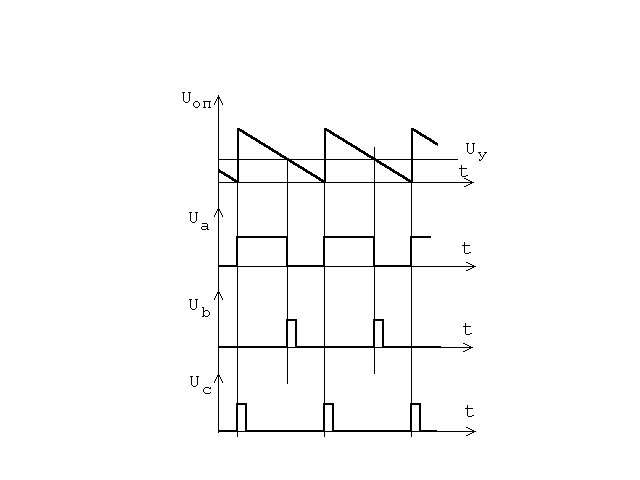 Рис.
2.5. Временная диаграмма работы системы
Рис.
2.5. Временная диаграмма работы системы
управления.
На усилителе А5 реализован компаратор, при напряжении
Uу, превышающем Uоп на выходе А5, появляется импульс Uа, показанный на рис. 2.5.
Одновибраторы, реализованные на элементах D1, D2 и D5, D6, выполняют функцию детектора фронта и выдают по-ложительные импульсы Uв и Uс при наступлении, соответст-венно, фронтов нарастания и спадания сигнала Uа. Продол-жительность импульсов может регулироваться в пределах 20...200 мкс, для обеспечения надёжного открытия тирис-торов VS1 и VSк коммутатора сопротивлениями R13, R14 и конденсаторами С2, С3.
Импульсы Uв и Uс поступают на формирователи, выпол-ненные на базе транзисторов Дарлингтона VT1,VT2 и VT3, VT4 и импульсных трансформаторов.
На усилителе А6 и триггере D7 реализован узел токо-вой защиты, блокирующий поступление управляющих импуль-сов на тиристор VS1.
Если в переходных режимах изменение напряжения уп-равления Uу происходит достаточно медленно по сравнению с периодом коммутации, то тиристорный коммутатор со схе-мой управления можно представить как безинерционное зве-но с ограничением. Входной величиной этого звена являет-ся управляющее воздействие Uу, выходной - cкваженность Регулировочная характеристика коммутатора имеет вид, по-казанный на рис. 2.6. Коэффициент передачи звена может быть подсчитан по выражению
 где
Uуmax
- максимальное значение опорного
пилооб-разного напряжения. Значение
Uу=
Uуmax
соответствует =1.
где
Uуmax
- максимальное значение опорного
пилооб-разного напряжения. Значение
Uу=
Uуmax
соответствует =1.
Если учесть дискретность управления системы управ-ления коммутатором, передаточная функция коммутатора мо-жет быть описана выражением
Wк(p) = Kу е-ур, (2.5)
где у - время чистого запаздывания, вносимое сис-темой управления, у~ Tк/2.
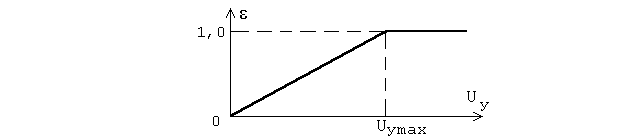 Рис.2.6.
Регулировочная характеристика
тиристорно-гокоммутатора.
Рис.2.6.
Регулировочная характеристика
тиристорно-гокоммутатора.
2.2. Анализ статических характеристик замкнутой си- стемы регулирования скорости.
Из анализа механических характеристик разомкнутой системы электропривода с импульсным регулированием соп-ротивления в роторной цепи (рис.2.1,б) следует, что в такой системе невозможно получить качественного регули-рования координат, так как регулировочные характеристики имеют низкую жёсткость. Высокое качество регулирования при сравнительно широком диапазоне регулирования скорос-ти может быть обеспечено только в замкнутых системах, в которых скважность процесса коммутации (относительная продолжительность включения ) является функцией регули-руемых параметров (скорость, ток, момент). В таких сис-темах в качестве обратной связи может быть использована обратная связь по скорости или по выпрямленному напря-жению и току роторной цепи. Для ограничения момента в переходных и аварийных режимах может быть использована задержанная обратная связь по выпрямленному току ротора.
Один из возможных вариантов замкнутой системы регу-лирования скорости с суммирующим усилителем приведён на рис.2.7.
Управление тиристорным коммутатором осуществляется с помощью системы управления СУ, на входе которой осу-ществляется суммирование сигналов управления Uу с выхода операционного усилителя А1 и задержанной обратной связи по току Uт с выхода компаратора D1.
Рассмотрим работу системы в режиме стабилизации скорости, когда выпрямленный ток ротора Id меньше устав-ки токоограничения (Uот< Uотс) и узел ограничения моме-нта, показанный в виде компаратора D1, не принимает участия в формировании характеристик. Выходное напряже-ние D1 равно нулю.
Напряжение на выходе усилителя А1 Uу определяется входным, которое, в свою очередь, является алгебраичес-кой суммой двух сигналов: сигнала задания скорости Uзс и сигнала обратной связи по скорости Uос. Выделение сигна-ла Uос осуществляется косвенным образом путём измерения выпрямленного напряжения Ud и выпрямленного тока Id.
Пропорциональность выходного напряжения Uос усили-теля А2 текущему значению скорости базируется на следую-щем.
Согласно выражению (2.2), значение выпрямленной ЭДС будет равно ЕdoS = Ud+ IdRэ, где Ud= IdRd - падение нап-ряжения на импульсно-регулируемом сопротивлении.
Тогда значение скольжения можно определить как
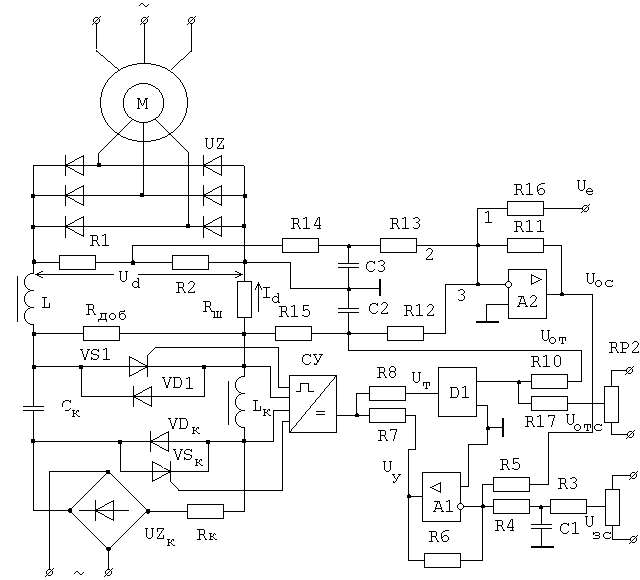 Рис.
2.7. Схема замкнутой системы регулирования
Рис.
2.7. Схема замкнутой системы регулирования
с импульсным управлением в цепи ротора.
S= (Ud+IdRэ)/Edo, (2.6)
а значение скорости двигателя:
= о(1-S) =(о/Edo)[Edo-(Ud+IdRэ)]. (2.7)
Отсюда следует, что для получения сигнала, пропор-ционального скорости, достаточно измерить ток и напряже-ние на выходе выпрямителя UZ. На рис.2.7. на вход усили-теля А2, формирующего сигнал обратной связи по скорости, в соответствии с уравнением (2.7) подаются три сигнала: постоянный Uе, пропорциональный Еdo, и сигналы обратных связей по напряжению и току, соответственно, через рези-сторы R13, R14 и R12, R15. Напряжение на выходе А2 равно
Uос=КеUе-{[R2/(R1+R2)]КUUd}-RшКIId, (2.8)
или Uос= Кс= КеUе- КнUd - КтId, (2.9)
где Ке= R11/R16; КU= R11/(R13+R14); КI= =R11/(R12+R15) - коэффициенты передачи усилителя А2 со-ответственно по входам 1, 2 и 3; Кс, Кн, Кт - коэффици-енты обратных связей по скорости, напряжению и току, со-ответственно;
Кн=[R2/(R1+R2)]КU; Кт=RшКI. (2.10)
Для нахождения соотношений между коэффициентами обратных связей и параметрами схемы умножим почленно вы-ражение (2.7) на Кс и приравняем правую часть полученно-го выражения к правой части выражения (2.9):
Ксо-Кс(о/Edo)Ud-Кс(о/Edo)RэId=
=КеUе-КнUd-КтId. (2.11)
Отсюда получим
КеUе=Ксо;Кн= Кс(о/Edo);Кт= Кс(о/Edo)Rэ. (2.12)
По известной величине коэффициента обратной связи по скорости Кс по уравнениям (2.12) можно расчитать ко-эффициенты обратных связей по напряжению и току, а также значения Ке и Uе.
Для анализа работы системы регулирования запишем уравнения, характеризующие процессы в цепи управления коммутатором. Напряжение управления Uу, подаваемое на вход системы управления коммутатором будет равно:
Uу= КзсUзс - КосКс; (2.13)
где Кзс= R6/(R3+R4); Кос= R6/R5 - коэффициенты пе-редачи суммирующего усилителя А1 по задающему входу и по входу обратной связи.
Скважность процесса коммутации определяется как
= КуUу = Ку(КзсUзс - КосКс). (2.14)
В режиме стабилизации скорости схема работает следующим об-ра-зом. Допустим, электропривод работал с момен-том нагрузки Мс1 на характеристике 4 (рис.2.8), обусловлен--
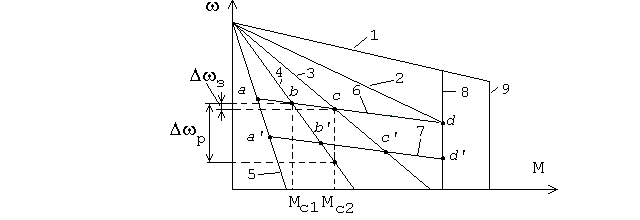 Рис.
2.8. Механические характеристики замкнутой
системы
Рис.
2.8. Механические характеристики замкнутой
системы
импульсного регулирования.
ной определённой скважностью 4(точка b). При увеличе-нии нагрузки до значения Мс2 в разомкнутой системе при = 4 = сonst скорость вращения двигателя снизилась бы на р. В замкнутой системе в соответствии с выражением (2.14) уменьшение скорости приведёт к увеличению значения скважнности , что в соответствии с (2.1) вы-зовет уменьшение импульсно-регулируемого сопротивления Rd, то есть обусловит переход двигателя на характеристику с большей жёсткостью, например, на харак-теристику 3 (точка с). При этом перепад скорости в зам-кнутой системе определяется сигналом задания Uзс.
При меньшей величине сигнала задания обратная связь вступает в работу при меньшей скорости, например, в точ-ке а', обеспечивая работу привода на характеристике 7.
Синтез параметров системы автоматического регулиро-вания в режиме стабилизации скорости можно осуществить используя графоаналитический метод расчёта. На плоскости - М строят вначале механические характеристики разомк-нутой системы для ряда значений . Затем по заданному (известному) значению погрешности стабилизации скорости з строим желаемую характеристику замкнутой системы и на пересечении этой характеристики с граничными характе-ристиками разомкнутой системы отмечаем две точки напри-мер, а и d (рис.2.8). В точке а (граничная характеристи-ка слева) значение 5=0, в точке d (граничная характери-стика справа) - = 2.
Уравнение (2.14) в точках а и d будет соответствен-но иметь вид
Ку(КзсUзс - КосКса)= 0; (2.15)
Ку(КзсUзс - КосКсd)= 2. (2.16)
Вычитая из (2.16) (2.15), получим
КуКосКс= 2/(а-d)= 2/з; (2.17)
Из полученного выражения видно, что суммарный коэф-фициент усиления системы должен быть тем выше, чем мень-ше з= а-d, и чем больше 2.
По уравнению (2.17) можно определить коэффициент обратной связи, предварительно задавшись коэффициентами Кос и Ку, а затем по уравнениям (2.10) и (2.12) опреде-лить параметры входных цепей усилителя А2.
Величину задающего напряжения можно определить из уравнения (2.15) при известных значениях Ку, Кос и Кс:
Uзс= (Кос/Кзс)Кса. (2.18)
Уравнение (2.14) позволяет построить механические характеристики замкнутой системы регулирования. Для этого следует задаться несколькими значениями скважнно-сти , для которых построены характеристики разомкнутой системы, и из уравнения (2.14) определить величину ско-рости двигателя на каждой из этих характеристик
 В
тех случаях, когда момент нагрузки на
валу двига-теля достигнет больших
значений, вступит в работу узел
токоограничения. Регулировочная
характеристика узла то-коограничения
изображена на рис. 2.9. При превышении
В
тех случаях, когда момент нагрузки на
валу двига-теля достигнет больших
значений, вступит в работу узел
токоограничения. Регулировочная
характеристика узла то-коограничения
изображена на рис. 2.9. При превышении
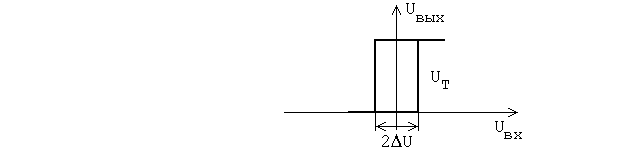 Рис.
2.9. Характеристика вход-выход устройства
Рис.
2.9. Характеристика вход-выход устройства
токоограничения.
сигналом обратной связи Uот напряжения отсечки Uотс на величину U, то есть когда
(R17/R10)Uот - Uотс >= U,
на выходе устройства токоограничения появится нап-ряжение Uт, превышающее напряжение управления Uу. На входе системы управления эти сигналы вычитаются Uсу=Uу- -Uт, поэтому включение в работу устройства токоограниче-ния обеспечивает обратную полярность сигнала Uсу. В со-ответствии с характеристикой системы управления (рис. 2.6) в этом случае =0, ток ротора будет уменьшаться. Уменьшаться будет и сигнал обратной связи по току Uот. Когда он снизится до значения Uот=(R10/R17)(Uотс- U), напряжение на выходе устройства токограничения станет равным нулю. Скважность начнёт увеличиваться до значе-ния Uу, ток ротора будет возрастать и т.д. Иными словами будет происходить периодическое включение и отключение устройства токоограничения с определённой частотой, что в конечном итоге, обеспечит поддержание среднего значе-ния переменного тока ротора Id на заданном уровне, рав-ном Iотс. Величина этого тока определяется сигналом Uотс.
На рис. 2.8. работе электропривода в режиме стаби-лизации тока тока соответствуют характеристики 8 и 9, построенные при разных значениях Uотс,причём Uотс9>Uотс8.
В режиме стабилизации тока (момента) частота коле-баний (переключений) устройства токоограничения D1 явля-ется переменной величиной и зависит от нескольких факто-ров, в том числе и от ширины петли гистерезиса 2U (рис. 2.9). Изменяется также скважность . Такой вид модуля-ции может быть назван релейно-импульсной модуляцией.
Для расчёта параметров узла токоограничения запишем уравнение для входных цепей D1. При Id=Idотс сигналы, поступающие на вход D1 равны между собой:
[Rш/(R15+R10)]Idотс= Uотс/R17. (2.20)
Величины Rш и R15 были определены ранее при расчёте входных цепей усилителя А2. По уравнению (2.20) опреде-лению подлежат Uотс, R10, R17 (для определения одного из параметров двумя другими задаются, исходя из условий технической реализации).
Фильтры, включённые на входах усилителя А2, пред-назначены для сглаживания пульсаций сигналов обратных связей по напряжению, току, а фильтр на входе усилителя А1 обеспечивает формирование экспоненциального закона изменения задающего напряжения
Uзс=(1-е-t/Тф)Uзс; (2.21)
где Тф=(R3+R4)C1 - постоянная времени фильтра.
Плавное изменение сигнала задания обеспечивает ана-логичный характер изменения пусковых токов и моментов электропривода.