

3.6.5 Схема алгоритма программы исследования динамической нагруженности машинного агрегата.
Рассмотренные в предыдущих параграфах материалы позволяют разработать программу исследования динамической нагруженности машинного агрегата. В качестве объекта исследования взята технологическая машина, в которой основным исполнительным механизмом является кривошипно-ползунный механизм.
Осуществляется ввод исходных данных (блок 1). Следует обратить внимание на соответствие направления вращения кривошипа , знака F по отношению к положительному направлению соответствующей оси координат, а также на знак величины эксцентриситета e.
В блоке 2 вычисляется
угловой шаг
,
максимальная координата ползуна
![]() (или
(или
![]() )
и присваивается начальное значение
обобщённой координате
)
и присваивается начальное значение
обобщённой координате
![]() .
.
Далее в цикле по
![]() (блоки 4-9) вычисляется кинетические
характеристики рычажного механизма,
динамические характеристики
,
(блоки 4-9) вычисляется кинетические
характеристики рычажного механизма,
динамические характеристики
,
![]() ,
,
кинетическая энергия
,
,
кинетическая энергия
![]() ,
работа сил сопротивления
,
работа сил сопротивления
![]() .
.
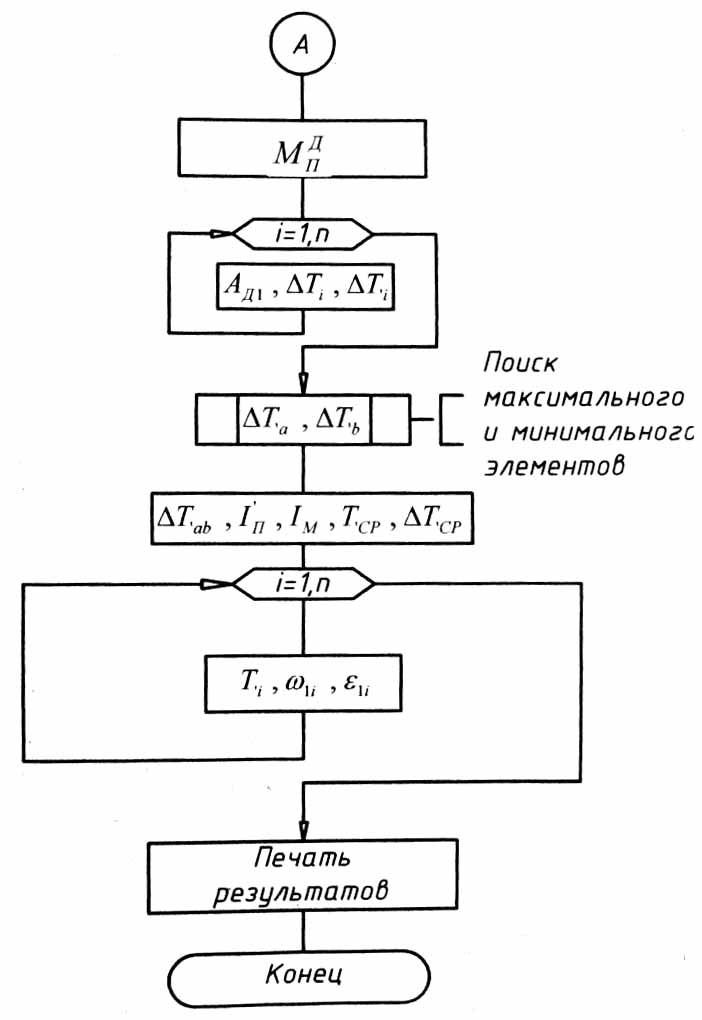
По окончании цикла определяется приведённый момент движущих сил (блок 10).
В новом цикле (блоки 11-12) производится вычисление , , .
В подпрограмме
(блок 13) из массива
находят экстремальные значения
и
,
что позволяет в блоке 14 определить
величины
,
![]() ,
а также
,
а также
![]() и
и
![]() .
.
После вычисления
в цикле (блоки 15-16)
![]() ,
,
,
,
![]() производится печать результат расчётов
(блок 17).
производится печать результат расчётов
(блок 17).

3.7 Обработка результатов вычисления.
Результаты вычислений, выполненные на ЭВМ даны в распечатке, по ним на листе 1 строим графики:
1) график кинематических
характеристик:
![]()
![]()
![]() ;
;
![]()
|
|
|
|
90 |
0 |
-125 |
0 |
60 |
5,8 |
-109,1 |
21,3 |
30 |
20,8 |
-64 |
34,2 |
0 |
39,4 |
0 |
35 |
-30 |
55,8 |
64 |
26,4 |
-60 |
66,4 |
109,1 |
13,7 |
-90 |
70 |
125 |
0 |
-120 |
66,4 |
109,1 |
-13,7 |
-150 |
55,8 |
64 |
-26,4 |
-180 |
39,4 |
0 |
-35 |
-210 |
20,8 |
-64 |
-34,2 |
-240 |
5,8 |
-109,1 |
-21,3 |
-270 |
0 |
-125 |
0 |
![]()
![]()
2) график переменной составляющей приведённого момента инерции и его составляющих: A, B, C;
![]()
-
 ,
мм
,
мм ,
мм
,
мм ,
мм
,
мм ,
мм
,
мм90
30,7
10,1
0
40,8
60
42,1
7,9
12,2
62,2
30
61,7
2,7
31,8
96,2
0
66,6
0
33,4
100,0
-30
53,5
2,7
19,0
75,3
-60
37,5
7,9
5,2
50,3
-90
30,7
10,1
0
40,8
-120
37,5
7,9
5,2
50,3
-150
53,5
2,7
19,0
75,3
-180
66,6
0
33,2
100,0
-210
61,7
2,7
31,8
96,2
-240
42,1
7,9
12,2
62,2
-270
30,7
10,1
0
40,8
3) график приведённых моментов движущих сил и сил сопротивления:
![]() ,
,
![]() ;
;
|
|
|
90 |
0 |
-12,2 |
60 |
68,3 |
-12,2 |
30 |
94 |
-12,2 |
0 |
62 |
-12,2 |
-30 |
20,5 |
-12,2 |
-60 |
4,6 |
-12,2 |
-90 |
0 |
-12,2 |
-120 |
0 |
-12,2 |
-150 |
-5,9 |
-12,2 |
-180 |
-19,4 |
-12,2 |
-210 |
-34 |
-12,2 |
-240 |
-40 |
-12,2 |
-270 |
0 |
-12,2 |
4) график работ
движущих сил и сил сопротивления:
![]() ,
,
![]() ;
;
![]()
|
|
|
90 |
0 |
0 |
60 |
9,4 |
-3,2 |
30 |
31,7 |
-6,4 |
0 |
52,7 |
-9,6 |
-30 |
63,3 |
-12,8 |
-60 |
66,4 |
-16 |
-90 |
66,8 |
-19,2 |
-120 |
66,8 |
-22,4 |
-150 |
66,1 |
-25,5 |
-180 |
62,9 |
-28,7 |
-210 |
55,7 |
-32 |
-240 |
45 |
-35 |
-270 |
38 |
-38 |
5) график изменения кинетической энергии машины и изменение кинетической энергии постоянной составляющей приведённого момента инерции: ;
![]()
|
|
|
90 |
0 |
-2,7 |
60 |
6,1 |
2 |
30 |
25 |
18,7 |
0 |
42,7 |
36,1 |
-30 |
50 |
45 |
-60 |
49,9 |
46,5 |
-90 |
47,1 |
44,4 |
-120 |
43,9 |
40,6 |
-150 |
40,1 |
35,2 |
-180 |
33,8 |
27,2 |
-210 |
23,5 |
17,2 |
-240 |
9,9 |
5,8 |
-270 |
0 |
-2,7 |
6) график изменения угловой скорости и углового ускорения кривошипа:
![]() .
.
![]() ;
;
![]()
|
|
|
90 |
90 |
24 |
60 |
72,6 |
-92,2 |
30 |
11,5 |
-150 |
0 |
-52,2 |
-105 |
-30 |
-84,7 |
-31 |
-60 |
-90,2 |
5,7 |
-90 |
-82,4 |
24 |
-120 |
-68,7 |
33 |
-150 |
-48,8 |
50 |
-180 |
-19,7 |
69,4 |
-210 |
17,1 |
79 |
-240 |
58,7 |
85 |
-270 |
90 |
24 |