

3.3 Построение плана положений механизма.
![]()
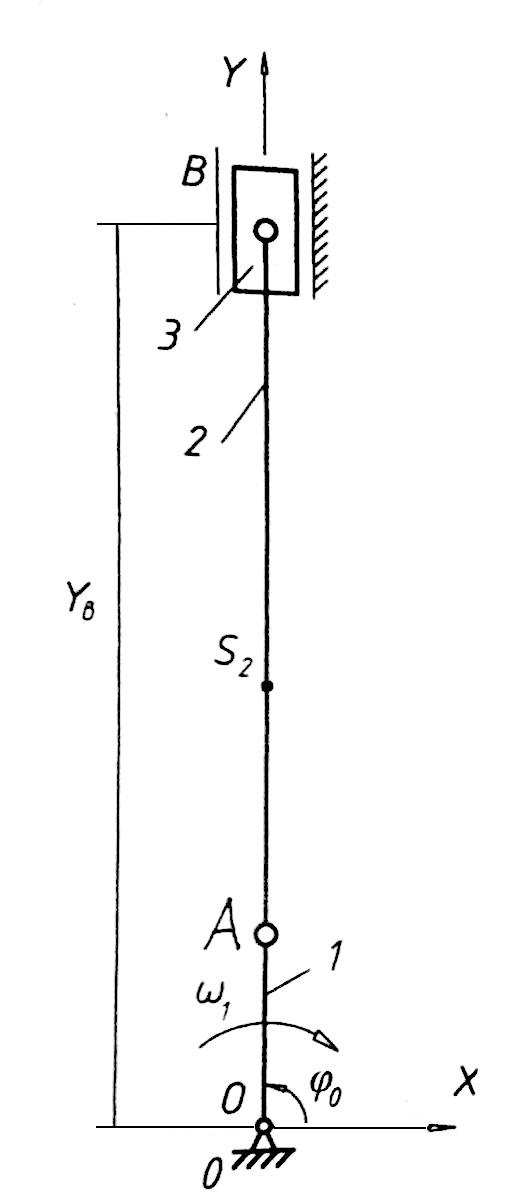 - начальная
обобщённая координата, соответствующая
наиболее удалённому крайнему положению
ползуна.
- начальная
обобщённая координата, соответствующая
наиболее удалённому крайнему положению
ползуна.
![]()
Выбор масштабного
коэффициента длины
![]() :
:
принимаем OA=35мм.
![]()
![]()
![]()
![]()
3.4 Определение кинематических характеристик кпм (аналитически).
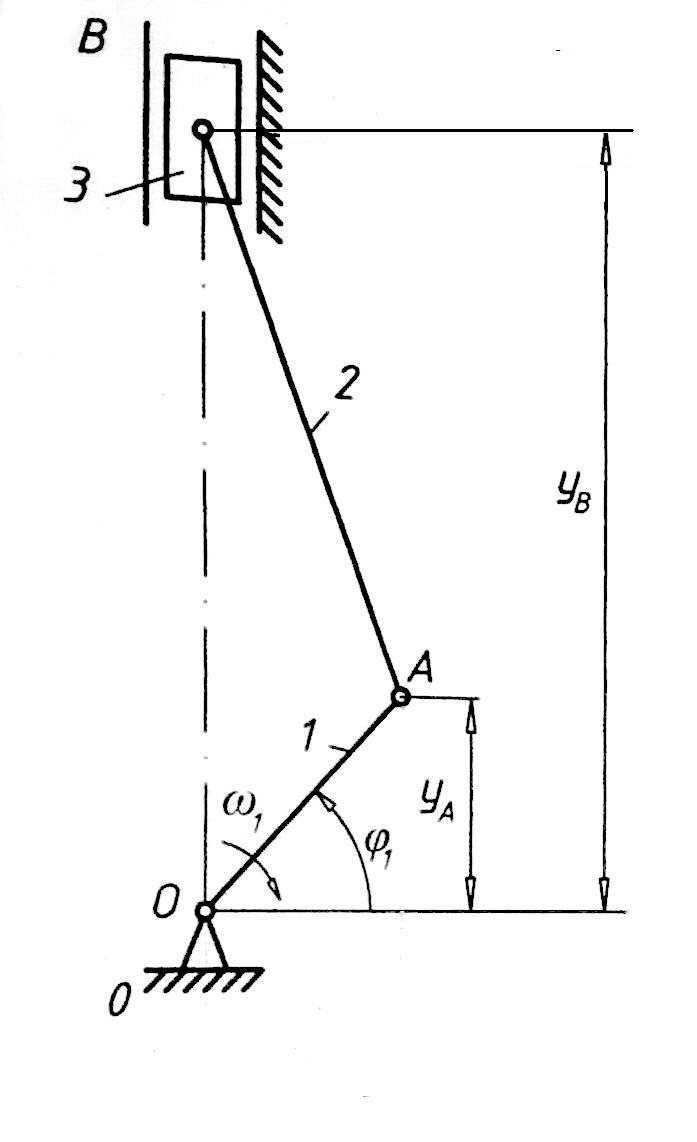
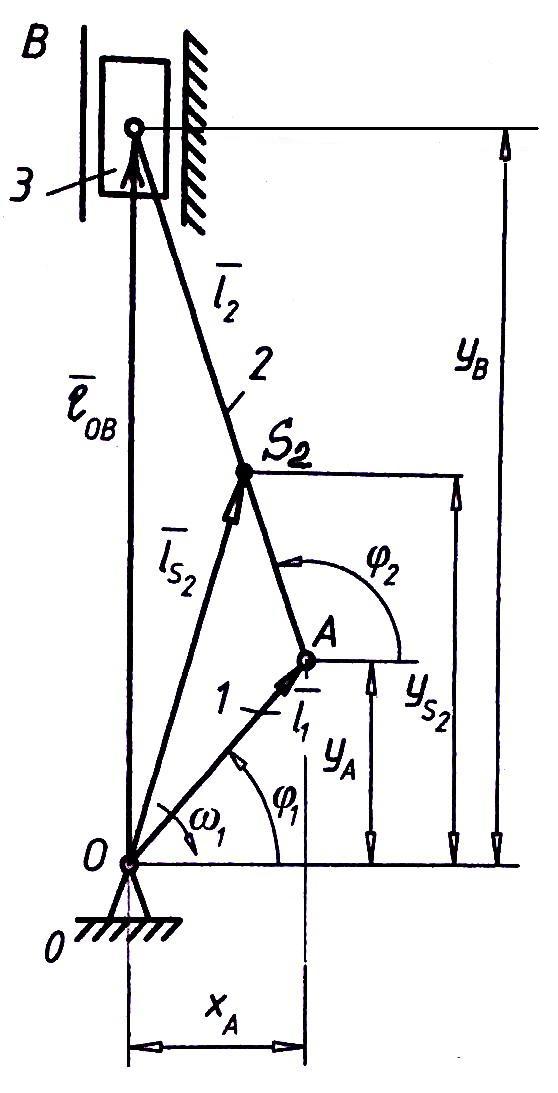
Действительная схема Расчётная схема механизма
Кинематические характеристики определяются по формулам, выведенным для метода замкнутого векторного контура.
Расчёт кинематических характеристик:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
5.
![]()
6.
![]()
7.
![]()
8.
![]()
![]()

10.
![]()
11.
![]()
![]()
![]()
![]()
![]()
![]()

![]()

16.
![]()
17.
![]()
Для сравнения
произведем определение кинематических
характеристик построением плана аналогов
скоростей. Для построения плана аналогов
скоростей примем
![]() .
В этом случае отрезок pa
изображает аналог скорости точки А :
ра=ОА . Известно , что
.
В этом случае отрезок pa
изображает аналог скорости точки А :
ра=ОА . Известно , что
![]() .
Поскольку между скоростями и аналогами
скоростей существует пропорциональность,
то для точки В записываются аналогичные
векторные уравнения:
.
Поскольку между скоростями и аналогами
скоростей существует пропорциональность,
то для точки В записываются аналогичные
векторные уравнения:
![]()
Построение точки
![]() находим по теореме подобия. Графический
расчёт:
находим по теореме подобия. Графический
расчёт:
![]()
![]()
![]()
Сопоставление расчётов:
|
|
|
Аналитический |
-0,218 |
0,021 |
Графический |
-0,21 |
0,02 |
3.5 Обработка индикаторной диаграммы и определение внешних сил.
Индикаторная диаграмма представляет собой графическое изображение зависимости давления P от перемещения S ползуна. Требуется определить значение давления P и силы F для всех положений механизма.
Выбираем масштабный коэффициент для обработки диаграммы:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Сила, действующая на поршень, рассчитывается по формуле:
![]() ,
где
,
где
![]() - площадь поршня.
- площадь поршня.
![]() ;
Где d=75мм
– диаметр поршня.
;
Где d=75мм
– диаметр поршня.
![]()
Таблица результата расчётов:
№ |
|
|
|
1 |
120 |
3 |
-13248 |
2 |
117 |
2,9 |
-12806 |
3 |
100 |
2,5 |
-11040 |
4 |
65 |
1,6 |
-7066 |
5 |
28 |
0,7 |
-3091 |
6 |
12 |
0,3 |
-1325 |
7 |
0 |
0 |
0 |
8 |
0 |
0 |
0 |
9 |
6 |
0,2 |
-883 |
10 |
19 |
0,5 |
-2208 |
11 |
37 |
0,9 |
-3974 |
12 |
66 |
1,7 |
-7507 |
13 |
120 |
3 |
-13248 |
![]()
![]()
3.6 Динамическая модель машинного агрегата.
В движении входного звена исполнительного рычажного механизма имеют место колебания угловой скорости, основными причинами которых являются:
1)несовпадение законов изменения сил сопротивления и движущих сил в каждый момент времени;
2) непостоянство приведенного момента инерции звеньев исполнительного и некоторых вспомогательных механизмов.
Двигатель
Передаточный механизм
Основной (исполнительный) рычажный
механизм


Вспомогательные (кулачковые, рычажные
и др.) механизмы
Чтобы учесть влияние названных причин на закон движения входного звена исполнительного механизма, составляется упрощенная динамическая модель машинного агрегата и на ее основе - математическая модель, устанавливающая функциональную взаимосвязь исследуемых параметров.
Наиболее простой динамической моделью машинного агрегата может быть одномассовая модель:

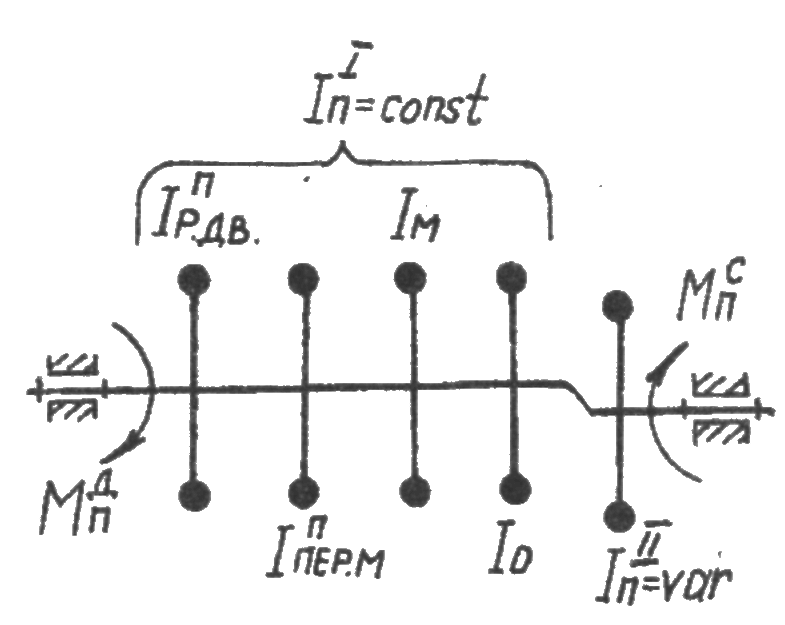
В качестве такой
модели рассматривается условное
вращающееся звено – приведения, которое
имеет момент инерции
![]() относительно оси вращения (приведённый
момент инерции) и находится под действием
момента сил
относительно оси вращения (приведённый
момент инерции) и находится под действием
момента сил
![]() ,
где
,
где
![]() - приведённый момент движущих сил;
- приведённый момент движущих сил;
![]() - приведённый момент сил сопротивления.
- приведённый момент сил сопротивления.
Динамические
характеристики
![]() и
должны быть такими, чтобы закон вращения
звена приведения был таким же, как и у
главного вала машины (кривошипа 1
основного исполнительного рычажного
механизма), т.е.
и
должны быть такими, чтобы закон вращения
звена приведения был таким же, как и у
главного вала машины (кривошипа 1
основного исполнительного рычажного
механизма), т.е.
![]() ,
,
![]() ,
,
![]()