

2.1.3. Пружинный маятник
В
качестве другого примера гармонического
осциллятора рассмотрим пружинный
маятник – материальную точку массой
m,
прикрепленную к одному концу идеальной
невесомой пружины жесткостью к,
другой конец которой закреплен. Длина
пружины в нерастянутом положении равна
![]() .
.
Пусть
на материальную точку массой m
действует, кроме силы упругости пружины
![]() ,
постоянные силы
,
постоянные силы
![]() ,
,![]() ,
… , не зависящие от удлинения пружины,
ни от кинематических характеристик
движения материальной точки (например,
ее скорости). В положении равновесия
,
… , не зависящие от удлинения пружины,
ни от кинематических характеристик
движения материальной точки (например,
ее скорости). В положении равновесия
 =
=
 ,
,
т.е. пружина будет расположена вдоль равнодействующей силы и растянута (или сжата) на величину
Δl
=
 .
(49)
.
(49)
Если теперь вывести пружину из положения равновесия, растянув или сжав ее на величину x, отсчитываемую от положения равновесия, то равнодействующая сила не изменится, а сила упругости увеличится на величину kx. В результате этого появиться результирующая сила, направленная в сторону положения равновесия (возвращающая сила) и равная
Fx = - kx
Отсюда видно, что возвращающая сила линейно зависит от смещения x, причем коэффициент возвращающей силы равен жесткости пружины
k = к,
а это означает, что пружинный маятник будет совершать гармонические колебания с частотой
ω0 = (50)
и периодом
T = 2π
около положения равновесия, в котором пружина растянута на величину, определяемую выражением (49).
Обратим внимание, что собственная частота (и период) колебаний пружинного маятника определяется лишь жесткостью пружины и массой маятника и не зависит от внешних сил , , … , действующих на него, от которых зависит лишь растяжение пружины в положении равновесия. Поэтому, где бы ни находился пружинный маятник (в шахте, на вершине горы или на борту спутника) и как бы ни двигалась точка закрепления пружины, его частота и период колебаний будут всегда одними и теми же.
Коэффициент
жесткости характеризует пружину в целом
и зависит как от свойств материала, из
которого она изготовлена, так и от ее
геометрических характеристик. Некоторое
представление об этих зависимостях
можно получить на основании следующей
модели. Заменим пружину стержнем длины
L
и сечения S.
Пусть на стержень действует деформирующая
(растягивающая или сжимающая) сила F.
Она создает в стержне механическое
напряжение σ
=
![]() и удлиняет его на х.
Относительное удлинение составляет
ε =
и удлиняет его на х.
Относительное удлинение составляет
ε =
![]() .
Закон Гука представим в виде ε
=
.
Закон Гука представим в виде ε
=
![]() .
Здесь Е – модуль Юнга. Сравнивая с F
= kx,
получим k
=
.
Здесь Е – модуль Юнга. Сравнивая с F
= kx,
получим k
=
![]() .
Жесткость пружины обратно пропорциональна
ее длине.
.
Жесткость пружины обратно пропорциональна
ее длине.
2.1.4. Комбинированные осцилляторы
Комбинированный осциллятор - маятник, находящийся под воздействием нескольких сил различной физической природы, обеспечивающих возвращение отклоненного тела к одному и тому же положению устойчивого равновесия. Будем считать, что осциллятор совершает одномерные движения. Поэтому комбинацию математического маятника и пружинного маятника, показанную на рис. 6, рассматривать не будем, поскольку здесь меняются как угол отклонения, так и длина маятника. Это колебания с двумя степенями свободы.
Задача 2. Положительный заряд q сосредоточен на материальной точке массой m, которая подвешена в вакууме на невесомой нерастяжимой непроводящей нити длины l на высоте h над провод-
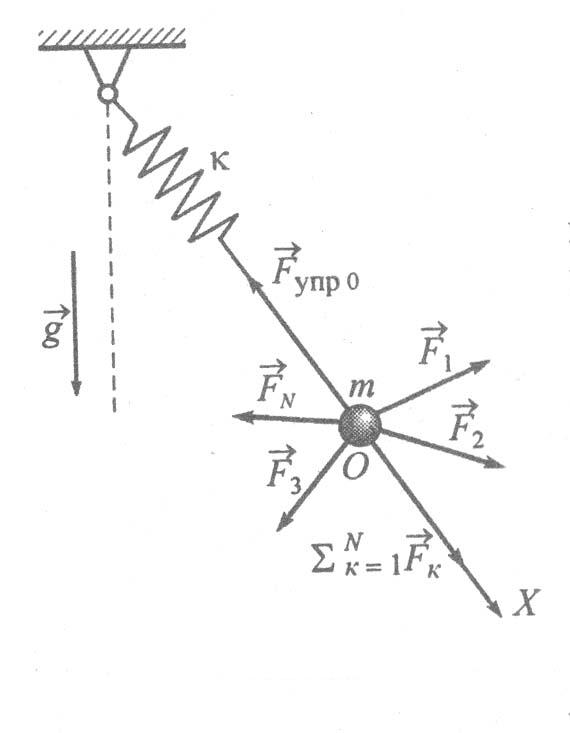
Рис.6. Математический маятник на упругом подвесе
ником (электропроводность которого бесконечна), занимающим нижнее полупространство. Граница раздела вакуума и металла – плоскость. Материальную точку отклоняют на малый угол от положения устойчивого равновесия. Найти собственную частоту колебаний такого комбинированного осциллятора.
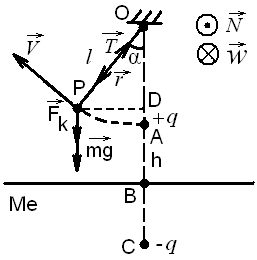
Рис.7. Заряженная материальная точка, колеблющаяся над проводящим полупространством.
AB
= BC
= h
; AD
= Δh
; l
= ![]() -
длина нити;
-
радиус-вектор, проведенный из точки О
в точку Р.
-
длина нити;
-
радиус-вектор, проведенный из точки О
в точку Р.
Решение
На точку действуют сила тяжести, сила натяжения нити и сила электростатического (кулоновского) взаимодействия (рис. 7).
Рассмотрим подробнее силу кулоновского взаимодействия Fk.
Заряд +q перераспределяет свободные электроны проводника. В результате на поверхности раздела появляется отрицательный заряд по величине равный заряду q. Между исходным зарядом и наведенными зарядами возникает электростатическое взаимодействие. При колебаниях поверхностные заряды будут перемещаться, возникнут токи, что приведет к выделению джоулева тепла и магнитному взаимодействию. Однако, в хорошем металлическом проводнике (с бесконечной электропроводностью) при малых скоростях движения зарядов этими явлениями можно пренебречь.
Величину
и направление кулоновской силы можно
найти из сравнения картины силовых
линий электрического диполя и картины
силовых линий заряда, подвешенного над
идеальным проводником. Силовые линии
входят в проводник под прямым углом и
их густота тем больше, чем ближе точка
на поверхности проводника к точке B,
лежащей на оси симметрии картины. Таким
образом, картина силовых линий для
рассматриваемого случая аналогична
картине силовых линий диполя с расстоянием
между положительным и отрицательным
точечными зарядами равным 2h.
Тогда Fk
= для оси симметрии. Это поле неоднородно,
но для малых колебаний момент кулоновской
силы, как и момент силы тяжести можно
считать пропорциональным углу α.
для оси симметрии. Это поле неоднородно,
но для малых колебаний момент кулоновской
силы, как и момент силы тяжести можно
считать пропорциональным углу α.
При отклонении нити на угол α материальная точка поднимается на высоту Δh = l(1 – cos α). Это приводит к изменению величины силы Fk:
Fk
=
 .
.
Однако, при малых колебаниях, когда
 <<
1 т.е.
<<
1 т.е.
![]() << 1
<< 1
силу кулоновского взаимодействия заданного заряда и наведенных поверхностных зарядов можно считать неизменной.
Момент инерции материальной точки (относительно оси вращения О параллельной поверхности идеального проводника) J0 = ml2, l – длина нити. Момент сил, действующих на материальную точку
N = ( mg + Fk )lsinα . (51)
Здесь PD = l sinα - плечо действующих сил.
Связь между векторами скорости, угловой скорости и вектором направленным от центра вращения по радиусу к материальной точке задается соотношением:
![]() =
[
=
[![]() ,
]
,
]
Если
скорость материальной точки направлена
влево, то угловая скорость
и момент импульса
![]() = J0
направлены против момента сил
= J0
направлены против момента сил
![]() .
Поэтому основное уравнение динамики
вращательного движения (уравнение
моментов) запишется в виде
.
Поэтому основное уравнение динамики
вращательного движения (уравнение
моментов) запишется в виде
J0α" = - (mg + Fk) lsinα, (52)
где
α" = ε =
![]()
![]() угловое ускорение.
угловое ускорение.
Тогда из (52) для sin α ≈α получаем
α"
+
![]() lα
= 0
lα
= 0
В соответствии со стандартными обозначениями ω02 = , где ω0 собственная частота. Если бы заряда на материальной точке не было, то ω012 = mg/J0 . Если бы можно было «отключить» силу тяжести, то ω022 = Fk/J0 . Поэтому мы можем записать ω02 = ω012 + ω022 . Если бы возвращающий момент обеспечивали n сил различной физической природы, то
ω02
=
![]() .
(53)
.
(53)
Разумеется, это соотношение верно только для малых колебаний.