

4.13.7 Схема управления
Управление подъемными установками может быть автоматическое, полуавтоматическое, дистанционное, местное.
В автоматическом режиме управления осуществляется без участия машиниста подъема (оператора); при полуавтоматическом управлении машинист дает команду на начало подъемного цикла и иногда — на выполнение некоторых заключительных операций, все другие операции выполняются без его участия; дистанционное управление осуществляется из пульта, установленного на приемной площадке, с ли клети (лифтовое управление); местное управление вырабатывается машинистом подъема.
Автоматизация клетевых установок по сравнению с скиповыми представляет более сложную задачу вследствие разнообразия режимов работы, широкого изменения погрузки, необходимости маневров у приемных площадок и т.д. Поэтому при автоматизации клетевых установок не предполагается устранение машиниста, а относится цель повышения безопасности и надежность работы подъема, улучшение условий работы машиниста.
Полная автоматизация предусматривает автоматическое выполнение всех периодов диаграммы скорости. Выбор метода автоматизации в отдельные периоды диаграммы скорости определяется, главным образом, диаграммой усилий.
В период разгона при положительных усилиях нужно двигательный режим работы привода. Система автоматического управления должна обеспечивать заданный закон изменения скорости подъемных сосудов. При асинхронных двигателях с металлическим реостатом в цепи ротора из разных способов автоматизации периода ускоренного движения наибольшее применение имеет пуск по току с дополнительной выдержкой за временем.
Равномерное движение при работе двигателя на естественной характеристике обеспечивается без использования средств автоматики, однако в тормозном режиме при спуске груза и в период равномерного движения нужно использования автоматических устройств.
Наиболее трудным для автоматизации есть период замедления и дотягивания, что объясняется необходимостью точного подхода сосудов к конечным пунктам пути, значительными изменениями погрузки, а также мягкостью искусственных характеристик асинхронного привода.
При положительных усилиях в период замедления применяется двигательный режим, при отрицательных — тормозной. Наибольшую сложность представляет автоматизация замедления при отрицательных усилиях. Торможение при асинхронном приводе может быть электродинамическое, с помощью токов сниженной частоты, механическое (тормозом), рекуперативное динамическое с применением каскадных схем. Автоматическое управление в периоды замедления и дотягивания требует применение сложных устройств автоматизации.
Привод постоянного тока в сравнении с асинхронным имеет лучшие регулировочные свойства благодаря твердым характеристикам двигателя. Автоматическое управление поводом постоянного тока может осуществляться одними и теми же средствами во все периоды диаграммы скорости как при положительных, так и при отрицательных усилиях.
Взаимосвязь привода, аппаратов управления и защиты устанавливается по схеме управления подъемной машиной. Одна из таких схем управления подъемной установкой с асинхронным поводом и с автоматизацией периода ускоренного движения показанная на рис. 81.
Для облегчения чтения схемы выделенные следующие цепи.
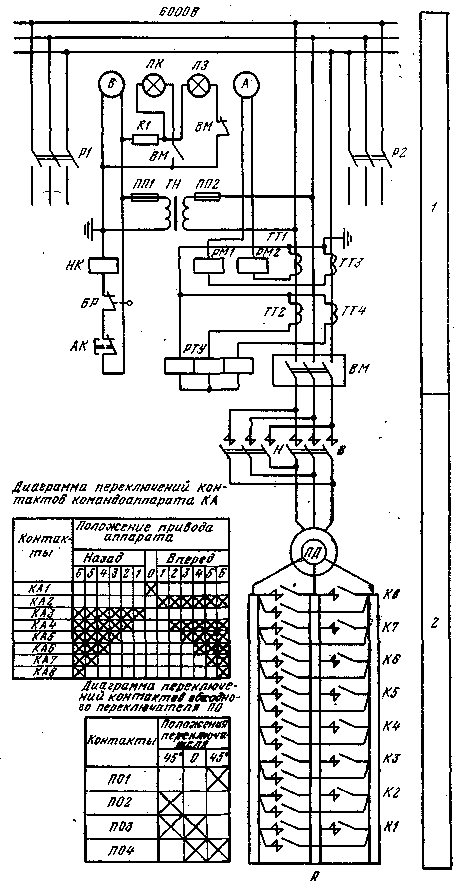
Цепь (1) высоковольтного распределительного устройства, в которую входят два разъединителя Р1 и Р2 рабочего и резервного высоковольтных кабелей, масляный выключатель ВМ с трансформаторами тока ТТ1 ... ТТ4 и трансформатором напряжения ТН. От трансформаторов ТТ1 ... ТТ4 питаются катушки максимальных реле РМ1 и РМ2 выключатели ВМ, гуменное реле ускорения РТУ и амперметр А. От трансформатора ТН питаются нулевая катушка НК выключателя ВМ, вольтметр В, зеленая ЛЗ и красная ЛК сигнальные лампы, которые указывают соответственно на выключение и включение выключателя ВМ. В цепи катушки НК имеется контакт АК ножной аварийной кнопки и контакт БР блокирование, которое отключает выключатель ВМ при открывании двери реверсора.
Силовая цепь (2) подъемного двигателя ПД состоит из контактов В («Вперед») и Н («Назад») реверсора. В цепь ротора двигателя ПД включенные ящики сопротивления R, ступени которого шунтируются с помощью контактов К1 — К8 контакторов ускорения.
Цепь (3) источников постоянного тока с переключателем П1 — генераторы Г1 и Г2 с обмотками возбуждения 0ВГ1 и 0ВГ2 и установочными резисторами R13 и R15.
От источника постоянного тока питаются цепи: (4) — защиты-контактора КТП; (5) — катушек В и Н контакторов реверсора с контактами командоаппарата КА2 и КА3; (6) — катушек К1 —К8 контакторов ускорения с контактами командоаппарата КА4 — КА8; (7) — реле РДБ дуговой блокировки; (8) — катушек РУ1 — РУ8 реле времени; (9) — катушки реле РШ, необходимого для шунтирования в цепи защиты в период разгона машины контакта РКЦ реле контроля цепи электрического ограничителя скорости, с контактами БК1 и БК2, управляемыми от рычага электрического ограничителя скорости; (10) — обмотки возбуждения ОВТГ тахогенератора ТГ электрического ограничителя скорости, в цепи которого последовательно включенные реле РЛС, которое контролирует скорость при транспортировании людей, реле РКЦ контроля цепи электрического ограничителя скорости, реле РКС, которое контролирует скорость при транспортировании груза, и реостаты R16 и R17 реле ограничения скорости; (11) — катушки реле РП с контактами тепловых реле ТР контроля температуры подшипников.
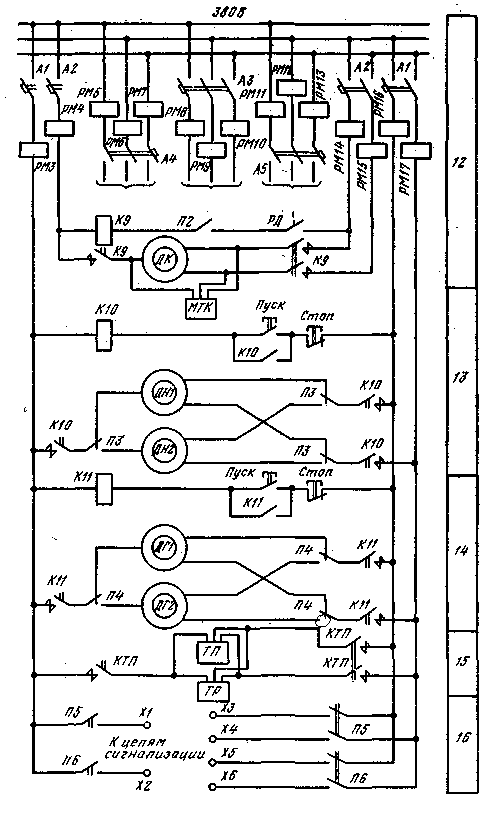
От шин переменного тока низкого напряжения 380 В с рабочим А4 и резервным А5 введениями от трансформаторов собственных нужд; через автоматы А1 и А2 получают питание цепи: (12) — двигателя ДК тормозного компрессора с автоматическим контакторным пуском с помощью реле давления РД и электромагнитом МТК запорно-разгрузочного клапана, который разгружает компрессор при его пуске; (13) — двигателей ДН1 и ДН2 маслонасосов смазывание (рабочего и резервного) с контакторным пуском с помощью кнопок; (14) — двигателей ДГ1 и ДГ2 генераторов постоянного тока Г1 и Г2 с контакторным пуском с помощью кнопок; (15) — электромагнитов ТР и ТП соответственно рабочего и предохранительного тормозов с включением от контактора цепи защиты КТП; (16) — сигнализации; автомат А3 есть резервной.
В цепи защиты (4) — контактора КТП предохранительного тормоза имеются следующие контакты: КА1 — контакт, замкнутый в нулевом положении рукоятки управление командоаппаратом КА; К8 — контактора последней ступени ускорения (6);. РКЦ — реле контроля цепей электрического ограничителя скорости (10); РШ — шунтирующего реле (9); ПГЛ — переключателя «Груз-люди», замкнутый только при транспортировании груза; РЛС — реле контроля скорости при транспортировании людей (10); РКС — реле контроля скорости при транспортировании грузов (10); ВМ — масляного выключателя (1); РП1 и РП2, ВК1 и ВК2 — защиты от переподъема соответственно бесконтактных выключателей на копре и конечных выключателях, установленному в АЗК (на схеме не показанные); П01 и П02 — обходного переключателя защиты от переподъема; КД — реле, что контролирует давление в цилиндре предохранительного тормоза; ВБТП — блокировочного выключателя предохранительного тормоза.
При подготовке схемы к работе включаются разъединители Р1 ли Р2 и выключатель ВМ, автоматы А1, А2, А4, А5, выключатель П2 двигатели ДК, тормозного компрессора, переключатель П3 и кнопка «Пуск» двигателей маслонасосов смазывание, переключатель П4 и кнопка «Пуск» двигателей ДГ1 ли ДГ2, выключатели П5 и П6 в цепях сигнализации, переключатель П1 в цепи (3); при включении последнего переключателя реле времени РУ1 ... РУ8 обтекаются током и размыкают свои контакты в цепях катушек контакторов К1 ... К8.
Рукоятку обходного переключателя ПО защиты от переподъема устанавливают у положения, при котором его контакты П01 и П02 разомкнутые (4), а П03 и П04 — замкнутые (5).
Рукоятку командоаппарата КА ставят в нулевое положение, рукоятку рабочего тормоза — у положения «Приостановлено», с помощью кнопки снимается предохранительный тормоз. При этом в цепи защиты замыкается контакт ВБТП и катушка контактора КТП обтекается током, включаются ее контакты КТП в цепях (4), (5), (6) и (15). При включении контактора КТП контактом КТП вводится в цепь катушки резистор R2 (применяется при могущественных контакторах), другим ее контактом шунтируется контакт КА1, что разрешает передвигать рукоятку командоаппарата, КА без разрыва цепи защиты.
Пуск машины возможный только после получения исполнительного сигнала. При подаче этого сигнала замыкается контакт КИС (6) в цепи катушек реверсора В и Н.
При пуске машины машинист передвигает рукоятку рабочего тормоза у положения «Расторможено», а рукоятку командоаппарата КА — в соответствующее крайнее положение. При перемещении рукоятки командоаппарата в направления, например, «Вперед» замыкаются его контакты КА2, КА4 ... КА8.
Катушка реверсора В обтекается током и ее контакты В запрутся в силовой цепи, благодаря чему к обмотке статора двигателя ПД будет подведенное напряжение.
При замыкании блока-контакта В в цепи катушки реле дуговой блокировки РДБ разомкнется контакт РДБ в цепи катушки реле РУ1. Реле РУ1 с выдержкой времени запрет свой контакт РУ1 в цепи катушки контактора К1, и последний своими контактами К1 зашунтирует первую ступень сопротивления в цепи ротора двигателя ПД: замыкающий блок-контакт К1 в цепи катушек реле РУ1 ... РУ8 запрется, а контакт, который размыкает, К1 разомкнется.
Реле РУ2 при включении контактора К1 обесточивается и с выдержкой времени замыкает свой контакт в цепи катушки контактора К2. Контактор К2 шунтирует другу степень сопротивления в цепи ротора двигателя ПД и своим замыкающим блоком-контактом подготовит цепь питания катушки реле РУ3 через контакт реле РТУ и т.д. к полному выключению сопротивления из цепи ротора двигателя ПД.
Если при шунтировании, например, второй ступени сопротивления толчок тока в статоре выходит большим, то отрабатывает реле гуменное ускорение РТУ и замыкает свой контакт в цепи реле РУ3 и держит его замкнутым до тех пор, пока ток в статоре по мере увеличения частоты обращения ротора не снизится к величине, при которой реле РТУ разомкнет свой контакт в цепи реле РУ3.
В начале замедленного движения подъемной машины машинист переставляет рычаг управления двигателем в среднее положение и подтормаживает машину рабочим тормозом. Если подъемные сосуды подойдут к приемным площадкам, машина затормаживается.
 Р
Р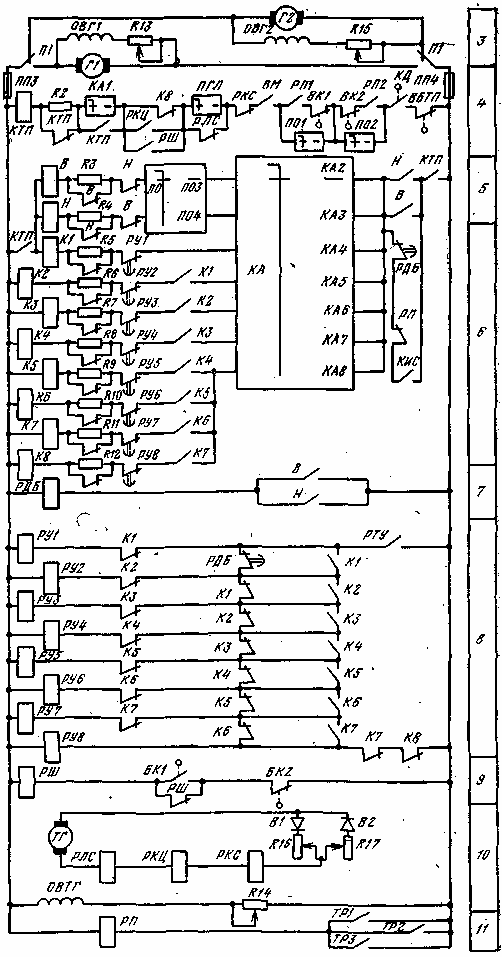 ис.
81.
Схема управления подъемной установкой
с асинхронным поводом и с автоматизацией
периода ускоренного движения
ис.
81.
Схема управления подъемной установкой
с асинхронным поводом и с автоматизацией
периода ускоренного движения