

4.13.3 Пульт управления, устройства для реверсирования и регулирования скорости
На пульте управления сосредоточены аппараты, воздействующие на электропривод и тормоз в режиме местного управления, аппаратура контроля эксплуатационных параметров агрегатов подъемной установки, скорости и местонахождения сосудов, устройства сигнализации.
Пульт шахтного подъема ПШП предназначен для местного и дистанционного управления подъемными установками при различных сочетаниях всех типов подъемных машин и электропривода. Функциями пульта являются: операции управления разгоном и замедлением подъемного двигателя и дистанционное управление тормозом с помощью командоаппаратов; визуальный консоль положения подъемных сосудов при помощи сельсинного указателя глубины; визуальный контроль и запись диаграммы скорости подъема; контроль нагрузки на подъемный двигатель; отключение подъемной машины кнопкой в аварийных случаях; фиксация кодовых сигналов управления; сигнализация о наличии напряжения в главных и оперативных цепях, о давлении в тормозной системе, о состоянии основных узлов и агрегатов установки (бункеры, кулаки, качающиеся площадки); управление вспомогательными приводами.
Пульт ПШП (рис. 57) имеет с подъемной машиной электрическую связь и может быть установлен как в машинном зале, так и на приемной площадке. При дистанционном управлении устанавливают пульты местного и дистанционного управления с взаимной блокировкой.
Н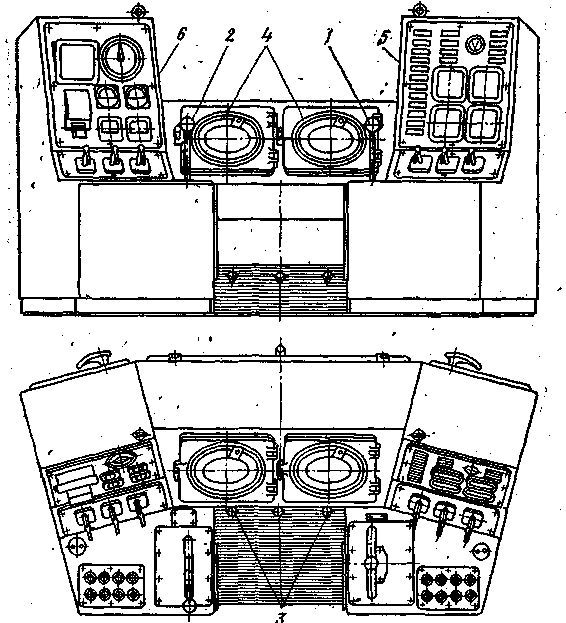 а
пульте имеются рукоятки: правая 1 — для
управления двигателем подъемной машины,
левая 2 — для управления тормозом.
а
пульте имеются рукоятки: правая 1 — для
управления двигателем подъемной машины,
левая 2 — для управления тормозом.
Рис. 57 - Пульт управления ПШП
Под ногами машиниста расположены кнопочные посты 3 аварийной остановки и включения динамического торможения. В центральной части пульта расположены два сельсинных указателя глубины 4, на правой 5 и левой 6 тумбах — измерительные приборы, регистрирующий таховольтметр, счетчики кодовых сигналов и циклов подъема, часы, манометры тормозов, универсальные переключатели.
Реверсоры РВМ-150 и РВМ-400 (реверсоры высоковольтные малогабаритные) предназначены для асинхронных двигателей фазным ротором мощностью соответственно до 1200 и 4000 кВт на напряжение 6 кВ.
Реверсор РВМ (Рис. 58) имеет три малогабаритных трехполюсных контактора с главными контактами, помещенными в металлическом шкафу. Два контактора 1 (В и Н) необходимы для включения в сеть и реверсирования двигателя и один контактор 2 (ДТ) — для включения постоянного тока при динамическом торможении или тока низкой частоты при автоматическом управлении.
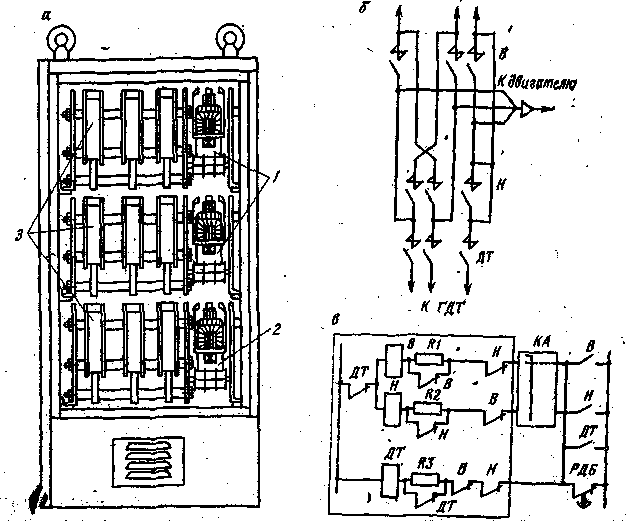
Рис. 58 - Реверсор РВМ: а — общий вид; 6 — силовая цепь; в — цепи управления
Главные контакты контакторов расположены в дугогасительных камерах 3. В реверсорах РВМ применяют высоковольтные контакторы с многократными камерами гашения дуги и магнитным дутьем.
Для устранения опасности одновременного включения двух контакторов, что привело бы к короткому замыканию в реверсоре, реверсор снабжен блокировкой, выполненной в виде блок-контактов катушек В, Н и ДТ. Однако такая блокировка не исключает короткого замыкания в реверсоре при очень быстром (менее 0,5 с) реверсировании: контактор включается, когда, на контактах другого, только что отключившегося, дуга еще не погасла. Для этого предусматривается «дуговая» блокировка в цепи катушек контакторов, осуществляемая реле времени РДБ. Контакт РДБ реле дуговой блокировки включен в цепь катушек контакторов В, Н и ДТ, чем обеспечивается необходимая для гашения дуги выдержка времени. Включение реверсора производится при помощи контактов командоаппарата КА.
Реостаты, применяемые для регулирования скорости асинхронных двигателей, бывают металлические и жидкостные.
Металлические реостаты собирают из ящиков сопротивления ЯС с чугунными элементами или КФ со спиралями фехралевой ленты. Последние более надежны в работе, так как фехраль не ломается при резких изменениях температуры.
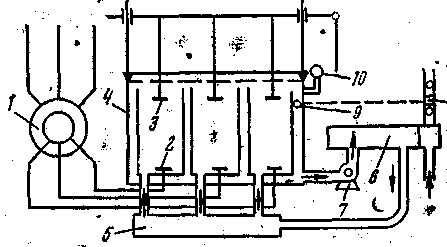
Рис. 59 - Схема жидкостного реостата с подвижными электродами:
1— подъемный двигатель; 2 и 3 —. неподвижные и подвижные электроды реостата; 4 - бак; 5 — коллектор; 6 — теплообменник; 7 — насос; 8 — вентиль регулирования теплообмена; 9 — термоэлемент; 10 — контроль уровня электролита
Жидкостные реостаты бывают двух конструкций: с неподвижными электродами при переменном уровне электролита и с подвижными электродами при постоянном уровне электролита (рис. 59).
Для облегчения перемещения электродов и возможности применения дистанционного и автоматического управления используется электрический или гидравлический привод.
При применении жидкостного реостата можно получить бесконечное множество характеристик двигателя, что позволяет плавно изменять вращающий момент, разгонять двигатель без изменения величины ускорения, тонко регулировать скорость подъемных сосудов один и тот же реостат в пределах его мощности можно использовать для широкого диапазона мощностей двигателей.
К недостаткам жидкостных реостатов относятся: нестабильность сопротивления их, которое зависит от температуры и концентрации электролита; испарение электролита.
Жидкостные реостаты изготавливаются в нормальном (ЖРН) и во взрывобезопасном (ВЖР) исполнениях для двигателей мощностью соответственно до 2500 и 500 кВт.
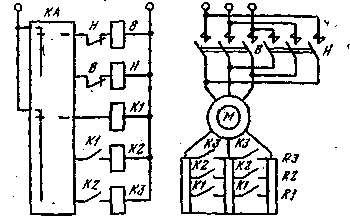
Командоаппараты, связанные с рукояткой управления двигателем, являются устройствами для включения и выключения контакторных реверсоров и реостатов асинхронных двигателей. В среднем положении рукоятки управления двигатель обесточен и в цепь ротора его введено все сопротивление реостата.
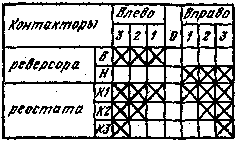
При перемещении рукоятки в первое положение в направлении «Вперед» статорная часть командоаппарата КА (рис. 60) включает контактор В реверсора, при этом замыкаются его контакты В, и двигатель М включается в сеть. При дальнейшем перемещении рукоятки роторная часть командоаппарата включает контакторы К1, К2, КЗ, контакты которых в строгой последовательности шунтируют ступени R1, R2, R3 реостата; контактор К3 замыкает ротор двигателя накоротко.
Таблица замыканий контакторов командоаппарата КА
 .
.
Рис. 60 - Схема контакторного управления