

4.10.3 Динамика подъемных систем
Вращающий момент Мвр, (Н·м), создаваемый подъемным двигателем относительно оси вращения органов навивки каната, затрачивается на преодоление статического Мст и динамического Мдин моментов подъемной системы относительно той же оси:
Мвр = Мст + Мдин (81)
При подъемной системе с органами навивки постоянного радиуса
![]()
или
F=Fст+mпa (82)
где F, Fcт и mпa — соответственно усилие двигателя, статическое и динамическое усилие подъемной системы, приложенные к окружности навивки каната, H; R - радиус навивки каната, м: mп — масса всех частей подъемной системы, которые двигаются, приведенная к окружности навивки каната, кг; a - линейное ускорение каната, м/с .
Статическое усилие подъемной системы представляет собой разность статических натяжений каната поднимающейся Fпод и опускающейся Fоп ветвей. Рассматривая общий случай, когда подъемные сосуды прошли от приемных площадок путь hx (рис.47), и пологая, что отрезок каната от верхней приемной площадки до оси копровых шкивов уравновешивается струной каната, найдем
![]()
![]() (83)
Основное
динамическое уравнение акад. М. М.
Федорова
для подъемной системы органами навивки
постоянного радиуса получается из
выражений (83) и (82):
(83)
Основное
динамическое уравнение акад. М. М.
Федорова
для подъемной системы органами навивки
постоянного радиуса получается из
выражений (83) и (82):
![]() (84)
(84)
Коэффициент k учитывает сопротивление воздуха при движении подъемных сосудов, трение в проводниках, в подшипниках направляющих шкивов и барабанов, жесткость каната. Эти сопротивления принимают равными 20 % от Qn для клетевых установок, 15 % от QП для скиповых установок при грузоподъемности скипов до 20 т, 10 % от QП для многоканатных установок при грузоподъемности скипов 20 ... 50 т и роликовых направляющих, т. е. соответственно k = 1,2; k = 1,15 и k = 1,1.
В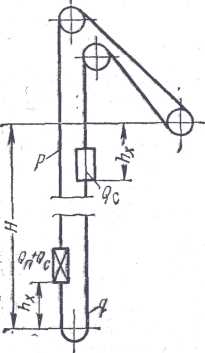 состав движущейся системы подъемной
установки входят и поступательно
движущиеся части, имеющие линейное
ускорение подъема, и части, участвующие
во вращательном движении и имеющие
линейные ускорения, отличающиеся от
линейного ускорения подъема. Поэтому
под массой та понимается не истинная
масса системы, а расчетная, так называемая
приведенная
масса к
окружности навивки каната, где имеет
место линейное ускорение подъема,
оказывающая такое же инерционное
воздействие, как и фактически существующие,
движущиеся со своим ускорением массы
подъемной системы.
состав движущейся системы подъемной
установки входят и поступательно
движущиеся части, имеющие линейное
ускорение подъема, и части, участвующие
во вращательном движении и имеющие
линейные ускорения, отличающиеся от
линейного ускорения подъема. Поэтому
под массой та понимается не истинная
масса системы, а расчетная, так называемая
приведенная
масса к
окружности навивки каната, где имеет
место линейное ускорение подъема,
оказывающая такое же инерционное
воздействие, как и фактически существующие,
движущиеся со своим ускорением массы
подъемной системы.
П
Рис.
47 - Схема к выводу динамического
уравнения подъемных систем с органами
навивки постоянного радиуса
Масса (кг) всех движущихся частей подъемной системы, приведенная к окружности навивки каната,
![]() (85)
(85)
Длина (м) подъемного каната одноканатной установки
![]() (86)
(86)
где Н — расстояние от нижней приемной площадки до уровня земной поверхности.
При установке с ведущим шкивом трения вместо двух подъемных канатов имеется один длиной
![]() (87)
(87)
где ftB.H — расстояние от верхней приемной площадки до оси направляющего шкива.
Длина (м) уравновешивающего каната
![]() (88)
(88)
где 30 — ориентировочная длина каната на образование петли в зумпфе ствола и закрепление каната к подъемным сосудам, м.
При определении приведенных масс пользуются заводскими данными. В характеристиках вращающихся частей установки (направляющие шкивы, органы навивки, зубчатая передача) указываются их маховые моменты GD2, В этом случае приведенные массы (кг) каждого из указанных элементов определяют по формуле
![]() (89)
(89)
Для определения приведенной массы ротора асинхронного двигателя (якоря двигателя постоянного тока) находят:
1) ориентировочную мощность (кВт) подъемного двигателя для установок с двумя сосудами
![]() (90)
(90)
то же для системы с противовесом
![]() (91)
(91)
где ρ — коэффициент динамического режима установки, учитывающий динамическую нагрузку.
Значения ρ можно принимать: при установке с неопрокидными клетями 1,5 ... 1,6, с опрокидными 2,2 ... 2,6; при установке с неопрокидными скипами 1,3 ... 1,4, с опрокидными 3,4 ... 1,8; для скиповых многоканатных установок 1,2 ,.. 1,3;
2) частоту вращения двигателя n (об/мин); к моменту выполнения данного расчета она должна быть известна из расчетов элементов кинематики, так как
![]() (92)
(92)
3) по известным Vop и п по каталогам асинхронных двигателей или двигателей постоянного тока выбирают двигатель с подходящими мощностью и частотой вращения и там же находят маховой момент ротора (якоря);
4) масса ротора (якоря), приведенная к окружности навивки (кг),
 (93)
(93)
На основании уравнения (94) строят диаграммы изменения движущих усилий в зависимости от времени — нагрузочные диаграммы на двигатель, для чего необходимо определить усилия в характерных точках диаграммы скорости.
Подъемная система без уравновешивающего каната (q = 0). Согласно выражению (94) основное динамическое уравнение этой системы:
F
=
![]() (94)
(94)
Движущие усилия (Н) в характерных точках трехпериодной трапецеидальной диаграммы скорости:
в начале подъемной операции
![]()
в конце ускоренного движения
![]()
в начале равномерного движение
![]()
в конце равномерного движения
![]()
в начале замедленного движения
![]()
в конце подъемной операции
![]()
Диаграмма движущих усилий подъемной системы без уравновешивающего каната показана на рис. 48, а, Ш. Здесь же изображено в соответствии с формулой (83) и c учетом коэффициента k изменение статического усилия FСТ — нисходящая прямая, согласно, которой указанное усилие уменьшается от начала к концу движения подъемных сосудов. В связи с непостоянством FСТ, система без уравновешивающего каната является статически неуравновешенной.
Усилия
в период равномерно ускоренного и
равномерно замедленного движения
изменяются при подъемной системе без
уравновешивающего каната по параболе,
так как второе слагаемое усилия [см.
формулу (83)]
зависит от величины
![]() ,
однако изображение
изменения движущих усилий в эти периоды
прямой линией
является практически достаточно точным.
,
однако изображение
изменения движущих усилий в эти периоды
прямой линией
является практически достаточно точным.
Асинхронный двигатель в период замедленного движения желательно отключать и работать тормозом, для чего в указанный период движущие усилия должны быть отрицательны. Это будет выполнено при условии, что
![]() (95)
(95)
при этом а3 не должно выйти за пределы, указанные в §4.10.2
К
Рис.
48
- Диаграммы подъемных систем с органами
навивки постоянного радиуса:
I
- скорость; II - ускорение; III – движущих
усилий; IV – мощности на валу подъемного
двигателя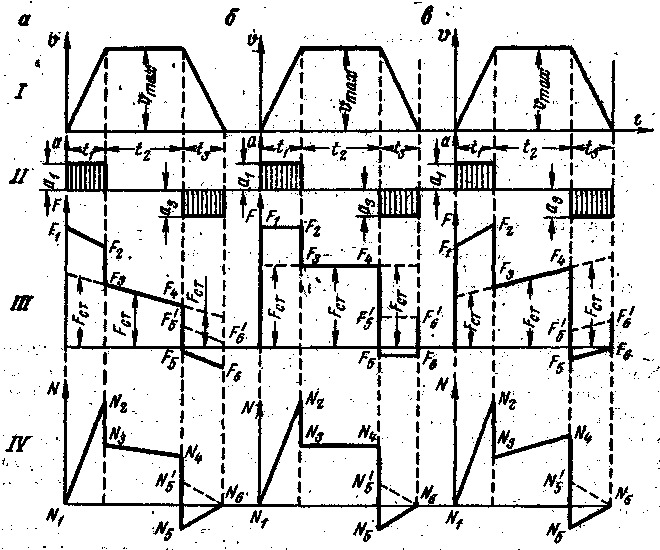
Подъемная система c равновесным уравновешивающим канатом (q = р). Согласно выражению (263) основное динамическое уравнение такой системы
F=kQng+mna (96)
Здесь изменение длины отвеса подъемного каната не связано с величиной движущего усилия, так как влияние подъемного каната устраняется равновесным уравновешивающим канатом.
Движущие усилия (Н) в характерных точках трехпериодной трапецеидальной диаграммы скорости:
в начале и конце ускоренного движения
F1 = F2 = kQng + mna1
в начале и конце равномерного движения
F3 = F4 = kQng
в начале и конце замедленного движения
F5 = F6 = kQng - mna3
Нагрузочная диаграмма на двигатель при этой системе изображенная на рис. 48, б, III, где также соответственно формуле (83) и с учетом коэффициента k показан график изменения статического усилия Fст — прямая, параллельная оси t. Постоянство Fcт указывает на то, что подъемная система с равновесным уравновешивающим канатом является статически уравновешенной.
При этой системе движущие усилия в течение всего периода замедленного движения могут быть равны нулю. Если продолжительные движущие усилия указывают на необходимость работать двигателем, а отрицательные — тормозом, то при движущих усилиях, равных нулю, не будет иметь места робота двигателем или тормозом. При этом движение подъемных сосудов в третьем периоде диаграммы скорости будет происходить за счет сил инерции, что называется свободным выбегом. Работа со свободным выбегом может быть достигнутая при замедлении;
![]() (97)
(97)
В связи с невозможностью абсолютно точной дозировки загрузки подъемною сосуда он может остановиться ниже или выше приемной площадки. И в одном и в другом случае необходимо дополнительное включение двигателя, что увеличивает продолжительность подъемной операции, поэтому работа со свободным выбегом практически не применяется.
При
подъемной системе с тяжелым уравновешивающим
канатом
[(q – p) > 0] движущие усилия в характерных
точках диаграммы скорости определяются
аналогично определению усилий при
системе без уравновешивающего каната
(рис. 48, в, III). При этом изменение
статического усилия F![]() изобразится восходящей прямой —
статически переуравновешенная подъемная
система, необходимость в которой
возникает в установках со шкивами трения
на шахтах сравнительно малой глубины.
изобразится восходящей прямой —
статически переуравновешенная подъемная
система, необходимость в которой
возникает в установках со шкивами трения
на шахтах сравнительно малой глубины.
В подъемных системах c опрокидными сосудами в начале подъемной операции нарушается уравновешивание собственных масс сосудов, так как кузов опускающегося сосуда в этот момент опирается на разгрузочные кривые и лишь частично нагружает канат. Поэтому усилие (Н) в начале подъемной операции
Fн = [ kQn + kyQc + (p-q)H]g + mпа', (98)
где kу — 0,35 — коэффициент, который учитывает нарушение уравновешивания.
Аналогично в конце подъемной операции
Fн
= [(k-1)Qn
- k![]() Qc
- (p-q)H]g -
mпа''.
(99)
Qc
- (p-q)H]g -
mпа''.
(99)
Изменение движущих усилий при движении ролика подъемного сосуда по разгрузочным кривым довольно сложно, так как будет меняться степень нарушения уравновешивания собственных масс сосудов (коэффициент kу). Для простоты принимают, что усилие в этот период изменяются по закону прямой линии.
Мощность (кВт) на валу подъемного двигателя в любой момент движения подъемных сосудов
![]() (100)
(100)
При отрицательных значениях усилий ηп должный быть перенесен с знаменателя в числитель.
По формуле (100) определяют мощности в характерных точках диаграммы скорости и затем строят диаграммы мощностей на валу подъемного двигателя, которые изображены на рис. 48. Штриховыми линиями показанное изменение мощности в третий период диаграммы скорости при положительных усилиях. Максимальная мощность (пик мощности) будет к концу периода ускоренного движения, которое обуславливается максимальным движущим усилием в это время и максимальной скоростью подъемных сосудов.