

1.2. Динамические режимы работы.
Структурная схема двигателя постоянного тока в замкнутой системе представлена на рис. 1.2.1.
В структурной схеме: Rя – сопротивление якорной цепи двигателя, Rпр – сопротивление преобразователя, См = Се – конструктивный коэффициент двигателя, Фн - полезный магнитный поток двигателя, Мд – электромагнитный момент двигателя, Мс - приведенный к валу двигателя момент нагрузки, J- приведенный к валу двигателя момент инерции системы, Ед – э.д.с. двигателя, НЭ – нелинейный элемент.
Рис.1.2.1. Структурная схема при нелинейной обратной связи.
Рассмотрим статическую характеристику нелинейного элемента (рис.1.2.2), при помощи которого реализуется ЗОС.
Uос
|
Uос
UIя
|
||
|
-U1 Зона нечув |
U1 ствительности
|
UIя |









Рис. 1.2.2. Статическая характеристика нелинейного элемента.
Если –U1 UIя U1, то Uос=0. Напряжения (диапазоны), при которых Uос=0, называются зоной нечувствительности.
иначе
sign U1
|
+1 U10 Uос=(UIя –U1 sign U1)Kнэ |
- 1 U10
|

1). Рассмотрим статические характеристики, когда сигнал ОС по Iя не выходит за пределы зоны нечувствительности линейного элемента, отсюда система работает без ОС по току, но с ОС по скорости.
Воспользуемся известной формулой
![]()
2). При токах нагрузки –IяотсIя или IяIяотс на выходе нелинейного элемента появится напряжение ООС по току.
Для тока = + Iяотс конечная скорость на первом участке равна начальной скорости на II участке.
Так как начальная скорость на II участке известна, определим изменение скорости на этом участке, относительно начальной при дальнейшем увеличении М(I(относительно Мотс(Iяотс))), т.е. на втором участке будем рассматривать структурную схему для приращения величины.
![]()
Передаточная функция замкнутой системы по управляющему воздействию определим из структурной схемы, представленной на рис.1.2.3. (КосIя = Кос*Кнэ).

Рис.1.2.3. Структурная схема замкнутой системы для определения передаточной функции по управляющему воздействию
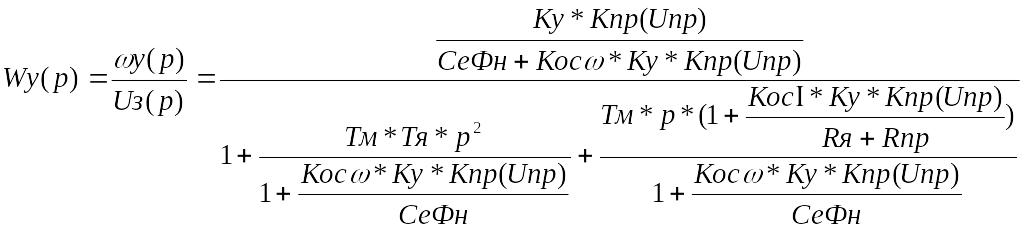 ,
,
где
![]() ,
,
![]() .
.
Передаточная функция замкнутой системы по возмущающему воздействию определим из структурной схемы рис.1.2.4.
Рис.1.2.4. Структурная схема замкнутой системы для определения передаточной функции по возмущающему воздействию
 .
.
Таким образом :
![]() (1.2.1)
(1.2.1)
Если в выражении (1.2.1) положить КосIя = 0, то получим выражение для динамической характеристики замкнутой системы с ООС по скорости двигателя:
 ,
,

![]() .
.
Найдём передаточную функцию по моменту двигателя.
Передаточная функция замкнутой системы по управляющему воздействию определим из структурной схемы рис.1.2.5.
Рис.1.2.5. Структурная схема замкнутой системы для определения передаточной функции по управляющему воздействию
Передаточная функция замкнутой системы по возмущающему воздействию определим из структурной схемы рис.1.2.6.
Рис.1.2.6. Структурная схема замкнутой системы для определения передаточной функции по возмущающему воздействию.
 .
.
Таким образом :
![]() (1.2.2.)
(1.2.2.)
Аналогично: как и для скорости, так и для момента можно, используя выражение (1.2.2.), получить выражения динамических характеристик для разомкнутой системы и замкнутых систем с ООС по току якоря и ООС по скорости двигателя.
Если КосIя = 0, то получим выражение для динамической характеристики замкнутой системы с ООС по скорости двигателя:
 ,
,
 ,
,
.