

2. Алгоритм исследования эффективности органов управления
Чтобы оценить достаточность для стабилизации ЛА выбранных значений коэффициентов и , характеризующих эффективность органов управления, необходимо проинтегрировать систему уравнений (1). Возмущающие силы и моменты по каналу тангажа подсчитываются по формулам [3]:
где Vвy
– значение скорости ветра (при сложном
профиле рассчитывается на каждом шаге
интегрирования);
![]() -
величина перекоса в установке k-го
двигателя;
-
величина перекоса в установке k-го
двигателя;
![]() -
эксцентриситет в установке k-го
двигателя.
-
эксцентриситет в установке k-го
двигателя.
После того, как все коэффициенты, входящие в уравнения системы (1), определены, можно приступать к интегрированию. Интегрирование может проводиться, например, методом Рунге-Кутта 2-го порядка. В течение исследуемого интервала времени должно выполняться ограничение
![]() (4)
(4)
В процессе
интегрирования может оказаться, что
при
![]() ,
,
![]() и
и
![]() -
возрастающая функция. Начиная с этого
момента времени, необходимо перейти к
интегрированию системы:
-
возрастающая функция. Начиная с этого
момента времени, необходимо перейти к
интегрированию системы:
|
(5) |
В качестве начальных выбираются значения параметров возмущённого движения, полученные интегрированием системы (1) при :
![]()
Интегрирование
системы уравнений (5) проводится до
момента времени
![]() ,
когда
,
когда
![]() причём
левая часть – убывающая функция.
причём
левая часть – убывающая функция.
Начиная с момента , возмущённое движение снова описывается системой (1). Начальные значения при ёё интегрировании выбираются равными конечным при решении системы (5).
В процессе
интегрирования определяются возмущения
параметров движения ЛА
![]() и
углов поворота средств управления
при
заданных начальных условиях. Если
возмущение угла тангажа остаётся меньше
заданного ограничения, определяемого
требованиями точности, т. е.
и
углов поворота средств управления
при
заданных начальных условиях. Если
возмущение угла тангажа остаётся меньше
заданного ограничения, определяемого
требованиями точности, т. е.
![]() и
выполняется неравенство (4), то выбранные
значения коэффициентов
и
,
характеризующих эффективность органов
управления, достаточны для стабилизации
ЛА.
и
выполняется неравенство (4), то выбранные
значения коэффициентов
и
,
характеризующих эффективность органов
управления, достаточны для стабилизации
ЛА.
Если ограничение на возмущение угла тангажа нарушается, то необходимо увеличить эффективность органов управления или предельные углы их отклонения.
3. Методические указания по работе с программой din
Программа предназначена для исследования динамических параметров ЛА и автомата стабилизации, состоит из подпрограмм, комбинация которых в определённом составе и последовательности позволяет решать следующие задачи, имеющие самостоятельное значение:
построение областей устойчивости в плоскости k1, k2 коэффициентов усиления автомата стабилизации (АС) и выбор коэффициентов k1, k2 из общей области;
построение областей устойчивости, автоматический выбор коэффициентов k1, k2, проверка эффективности органов управления по тангажу с выбранными коэффициентами усиления АС;
проверка эффективности органов управления по тангажу с заданными коэффициентами усиления АС.
Порядок работы с программой din
Запускается программа DIN.EXE
 .
При нажатии на пиктограмму
.
При нажатии на пиктограмму
 (или Ctrl+N)
появляется окно ввода данных.
(или Ctrl+N)
появляется окно ввода данных.
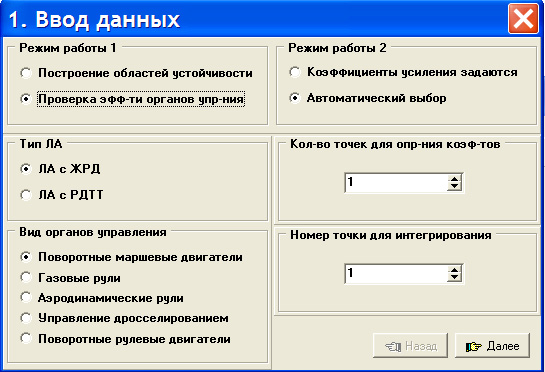
Рисунок 3
Указываем тип ЛА:
с жидкостным ракетным двигателем или
твердотопливный. Коэффициенты усиления:
автоматический выбор. Вид органов
управления указан в альбоме заданий
свой для каждого варианта, например,
управление осуществляется поворотом
маршевых двигателей. Количество точек
для определения коэффициентов усиления
АС: например, 1. Номер точки траектории,
для которой производится интегрирование
уравнений движения ракеты: например,
1. После заполнения всех окошек выбираем
![]() .
.
Вводятся исходные данные. Все координаты: координата центра масс ЛА (Xц.м), координата центра масс незаправленного ЛА (Xц.м сух), координата фокуса ЛА (XF), координата нижнего днища бака окислителя (XО0), координата нижнего днища бака горючего (XГ0), координата точки приложения управляющих сил – расстояние от плоскости торцевого шпангоута до точки крепления рулей (Lp) отсчитываются от плоскости торцевого шпангоута ЛА. Все размерности исходных данных должны быть заданы в системе СИ. После заполнения всех окошек выбираем .
Вводятся нужные характеристики конкретного ЛА, указанные в альбоме заданий. Продолжительность активного участка траектории, например, 100 с. .
Нужно сделать расчёт поочерёдно для всех задаваемых вариантов профилей ветровой нагрузки. Подбираются максимальная скорость порыва ветра и время действия порыва ветра: например, 10 м/с и 2 с (скорость ураганного ветра от 30 м/с). .
Задаётся интересующая секунда полёта ЛА из таблицы баллистического расчёта альбома заданий, например 36 секунда. Задаются характеристики ДУ. Перекос в установке двигателей, например 0.001 м. Эксцентриситет двигателя = 0 м. Задаются предельные углы: угол отклонения рулей, например, 2°; отклонение угла тангажа, например, 1°. Задаются параметры интегрирования уравнений движения ЛА: время интегрирования, например, 4 с, шаг интегрирования 0.0005 с, точность интегрирования 0.0001 с. После задания всех необходимых данных нажимаем
 .
.Можно сохранить набор исходных данных, нажав пиктограмму
 (или Ctrl+S).
Открыть - пиктограмма
(или Ctrl+S).
Открыть - пиктограмма
 (Ctrl+O).
(Ctrl+O).
Выполняем расчёт нажатием пиктограммы
 .
.
После нажатия на пиктограмму становятся активными пиктограммы (расчёт) и
 (результаты).
(результаты).
Результаты интегрирования оформляются в виде таблиц и графиков зависимостей
 (рис. 4, 5); таблиц и графиков областей
устойчивости, в которой распечатываются
значения k1 и k2
для следующих значений
:
0.005; 0.05; 0.1; 0.2; 0.3; 0.4; 0.5; 0.6; 0.7; 0.8; 0.9; 1; 2; 3;
4; 5; 6; 7; 8; 9; 10; 11; 12; 13; 14; 15 (рис. 6, 7).
(рис. 4, 5); таблиц и графиков областей
устойчивости, в которой распечатываются
значения k1 и k2
для следующих значений
:
0.005; 0.05; 0.1; 0.2; 0.3; 0.4; 0.5; 0.6; 0.7; 0.8; 0.9; 1; 2; 3;
4; 5; 6; 7; 8; 9; 10; 11; 12; 13; 14; 15 (рис. 6, 7).
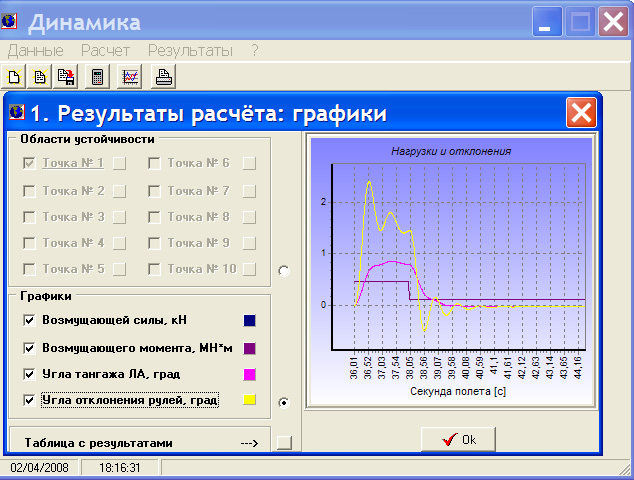
Рисунок 4

Рисунок 5
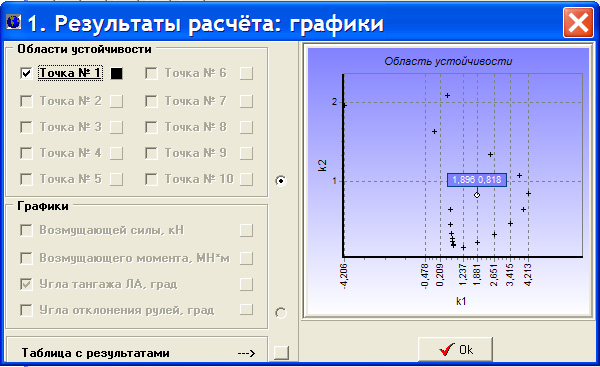
Рисунок 6
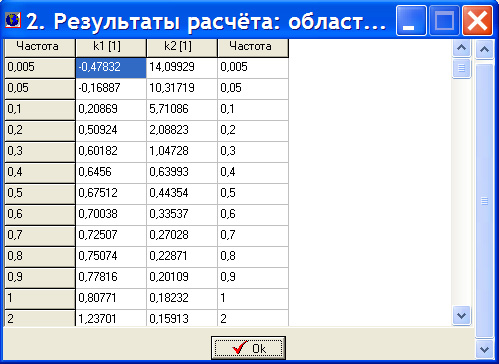
Рисунок 7
Найденные в процессе
интегрирования возмущения параметров
движения ракеты
![]() сравнивают
с заданными из условий требуемой точности
ограничениями
сравнивают
с заданными из условий требуемой точности
ограничениями
![]() .
Если на заданном интервале времени
неравенства
.
Если на заданном интервале времени
неравенства
![]() выполняются, то выбранные значения
коэффициентов
выполняются, то выбранные значения
коэффициентов
![]() а также
достаточны
для стабилизации ракеты. Если в конце
расчёта печатается сообщение: «!!! УГОЛ
ТАНГАЖА = … ПРЕВЫШЕНО ОГРАНИЧЕНИЕ»,
то необходимо увеличить эффективность
органов управления или максимально
допускаемый угол их отклонения, или
изменить значение предельно допускаемого
угла тангажа. Для увеличения эффективности
органов управления необходимо увеличить
тягу управляющих двигателей (при
управлении рулевыми двигателями) или
увеличить площадь рулей (при управлении
газовыми рулями).
а также
достаточны
для стабилизации ракеты. Если в конце
расчёта печатается сообщение: «!!! УГОЛ
ТАНГАЖА = … ПРЕВЫШЕНО ОГРАНИЧЕНИЕ»,
то необходимо увеличить эффективность
органов управления или максимально
допускаемый угол их отклонения, или
изменить значение предельно допускаемого
угла тангажа. Для увеличения эффективности
органов управления необходимо увеличить
тягу управляющих двигателей (при
управлении рулевыми двигателями) или
увеличить площадь рулей (при управлении
газовыми рулями).