

Практическая работа № 4 «Средства активного автоматического контроля»
1. Какие типы измерительных преобразователей применяются в приборах автоматического и автоматизированного контроля. Их преимущества и недостатки.
Электроконтактные преобразователи (ЭП) преобразуют линейные перемещения в дискретный электрический сигнал – команду при замыкании или размыкании электрических контактов.
При контроле размера детали, обрабатываемой на станке, ЭП показывает не действительное значение контролируемого размера, а нахождение контролируемого размера в пределах допуска на заданный размер. При достижении требуемого размера детали контакты преобразователя замыкаются и через усилитель командных сигналов он включает светофорное устройство.
При установке отсчетных устройств (индикаторов) ЭП могут контролировать фактические величины размера детали. Отсчетное устройство ЭП дает возможность рабочему визуально следить за изменением размера обрабатываемой детали и своевременно производить подналадку станка при изменении размера детали от износа режущего инструмента.
Машиностроительная промышленность серийно выпускает преобразователи модели 228 и 229, в которых предусмотрена возможность установки универсальной головки со шкалой.
Индуктивные приборы активного контроля имеют высокую точность измерения и небольшие габаритные размеры индуктивных преобразователей. В качестве источника энергии в индуктивных приборах используется электрический ток. Недостаток: сравнительная сложность электрических элементов.
Полная структурная схема индуктивного прибора дана на рис. 8.
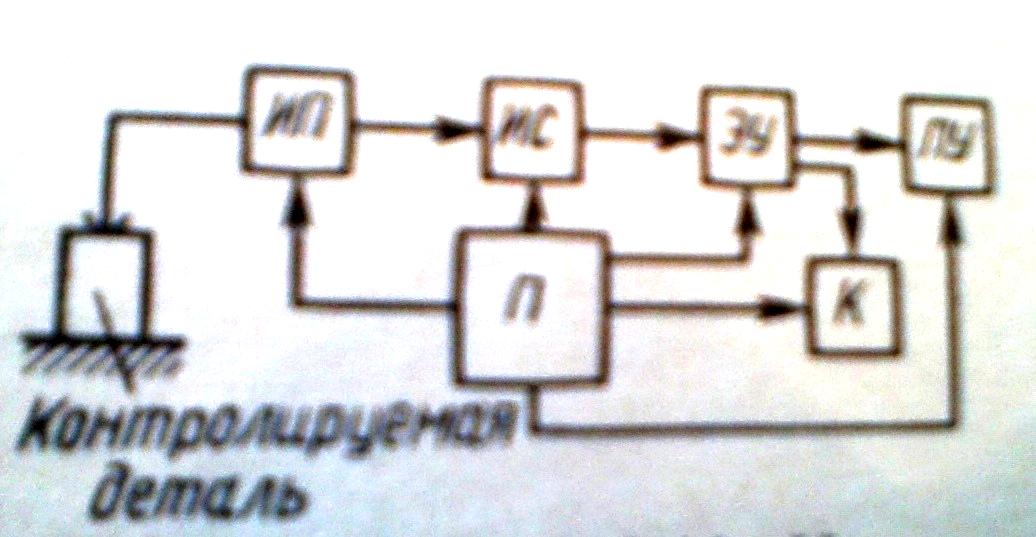
Рис.8. Структурная схема прибора:
ИП – индуктивный преобразователь; ИС – измерительная схема, преобразующая сигнал ИП в удобный для дальнейших преобразований и измерений электрический параметр; ЭУ – электронный усилитель; ПУ – показывающее устройство; К – устройство для подачи команд; П – источник питания.
На рис. 9 (а, б) дана схема индуктивного преобразователя.
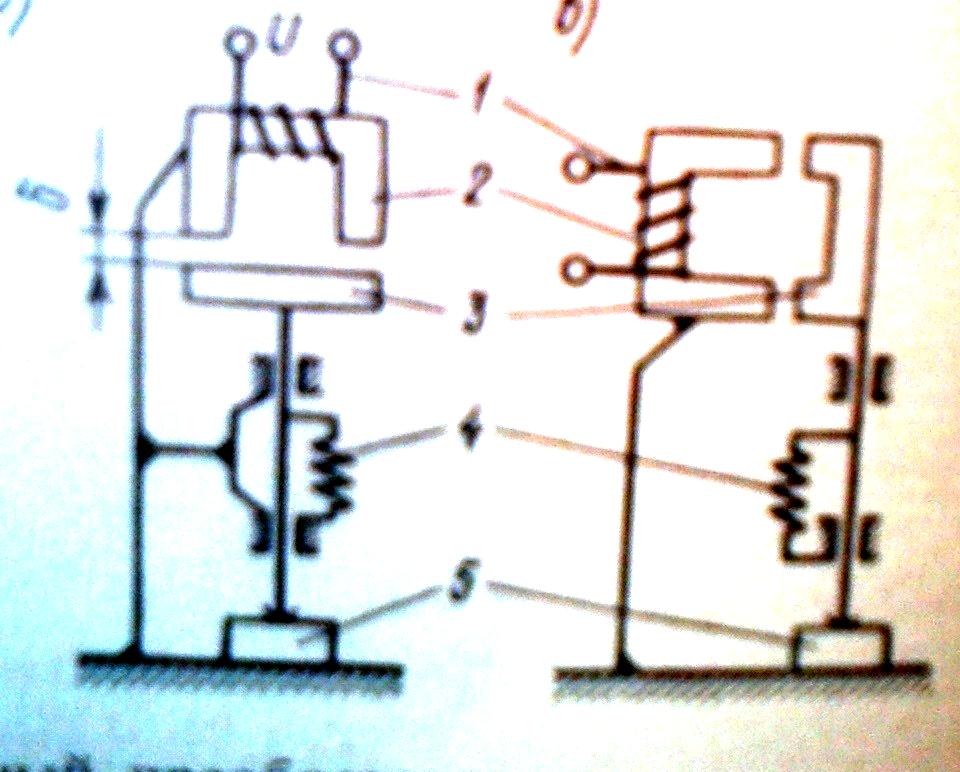
Рис. 9. Индуктивный преобразователь:
а – схема, в которой изменяемая величина вызывает изменение длины воздушного зазора; б – схема, в которой применяемая величина вызывает изменение площади воздушного зазора: 1 – катушка преобразователя;2 – магнитопровод; 3 – якорь преобразователя; 4 – пружина, создающая измерительное усилие; 5 – контролируемая деталь
Пневматические измерительные приборы позволяют контролировать любые линейные размеры обрабатываемых деталей и определять отклонения от правильной геометрической формы (овальность, конусность и т.п.), взаимное расположение поверхностей (перпендикулярность, несоосность). Пневматические приборы обладают высокой точностью при достаточно большом пределе измерения и позволяют проводить дистанционные измерения. Структурная схема пневматического прибора (рис. 10) включает в себя первичный преобразователь 1; измерительную схему 2; показывающий прибор 3; командное устройство 4; блок питания 5.
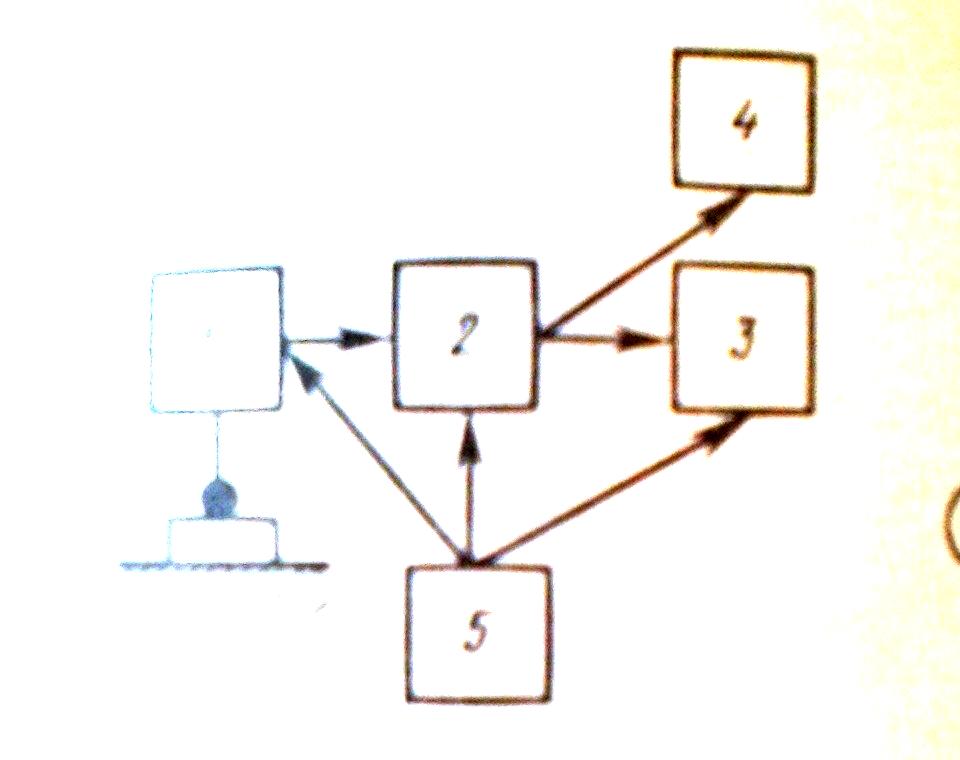
Рис. 10. Структурная схема пневматического прибора
Пневматический прибор БВ – П6060 для контроля наружных поверхностей детали. Этот прибор широко применяется в промышленности для контроля наружных гладких и шлицевых поверхностей валов, шлифуемых на круглошлифовальных станках. На рис. 11 показана структурная схема прибора БВ – П6060. В схему входит измерительная оснастка 1, отсчетный прибор 2, электромагнитный преобразователь 3, командные сигналы 4, блок сигнализации 5, блок питания сжатым воздухом 6, блок электропитания 7.
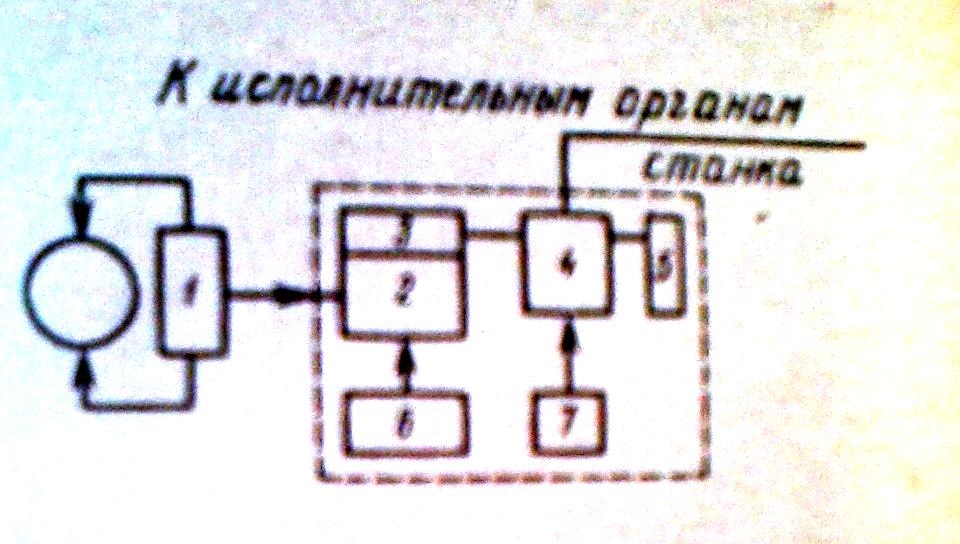
Рис. 11. Структурная схема прибора БВ – П6060