

Техническая структура асу тп с управляющей эвм (увм).
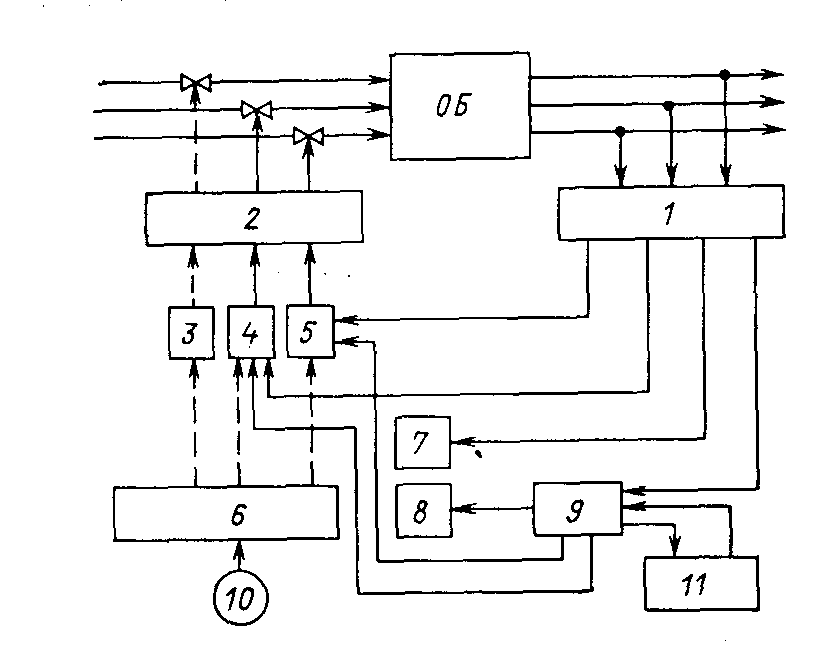
Рис. 1.7. Техническая структура АСУ ТП с управляющей ЭВМ, работающей в супервизорном режиме
Техническая структура АСУ ТП с управляющей ЭВМ, работающей в супервизорном режиме, приведена на рис. 1.7. Схема включает в себя следующие элементы: ОБ — управляемый объект; 1 — первичные измерительные приборы; 2 — исполнительные механизмы; 3 — подсистему дистанционного управления; 4 — подсистему логического управления; 5 — подсистему автоматического управления и регулирования; 6 — пульт оператора; 7 — индивидуальные вторичные измерительные приборы; 8 — устройства отображения информации, получаемой от ЭВМ; 9 — вычислительный комплекс (ЭВМ); 10 — человека-оператора; 11 — вышестоящую АСУ, с которой рассматриваемая АСУ ТП обменивается информацией.
Для возможности вмешательства оператора в ход технологического процесса все управляющие органы (а не только те, которые находятся в составе автоматической системы) снабжаются дистанционно управляемыми с пульта оператора серводвигателями; естественно, что оператор имеет возможность переводить на дистанционное управление также и любой серводвигатель, нормально управляемый регулятором или логическим контроллером. Подключение дистанционного управления к любому серводвигателю осуществляется также посредством соответствующего вызывного устройства.
Общая характеристика и классификация основных узлов увм.
На рис. 5.1 показана структурная схема АСУ ТП, базирующаяся на УВМ с исполнительными устройствами в виде АСУ ЭП и датчиками, установленными на технологическом оборудовании.
УВМ включает в себя следующие элементы (блоки): 1)блок запоминающий сведения об объекте и текущие задания, поступающие во внешнюю память с пульта управления; 2)блок сбора и преобразования информации о текущем состоянии объекта и действующих возмущениях; 3) блок центральный — процессор, выполняющий заданные алгоритмом преобразования информации для выработки управляющего воздействия, организующий взаимодействие всех элементов УВМ, и состоящий из арифметического, логического, управляющего и оперативного запоминающего устройств (ОЗУ); 4)блок прямых связей с объектом управления, передающих управляющие воздействия.
УВМ имеют ряд вспомогательных элементов, необходимых для организации процесса управления. К ним относятся средства связи человека с машиной, предназначенные для получения оперативным персоналом информации о ходе технологического процесса, коррекции алгоритма управления и принятия необходимых мер в аварийных ситуациях и средства ввода—вывода информации, включающие различные регистрирующие, индицирующие и запоминающие устройства (перфоленточные, перфокарточные и строкопечатающие, записи на кассеты и гибкие диски), экранные пульты — дисплеи, пишущие машинки, графопостроители.
На вход УВМ от датчиков поступает текущая информация, в основном аналогового вида (напряжение, ток, частота, угол поворота и т.п.). Так как УВМ оперирует с дискретными величинами, то аналоговые сигналы датчиков необходимо преобразовывать в дискретную форму при помощи аналого-цифровых преобразователей.
Однако для управления исполнительными механизмами (управляющими органами) в большинстве случаев необходимы непрерывные сигналы, а УВМ вырабатывает управляющие сигналы в дискретной форме, поэтому необходимо осуществлять их цифро-аналоговое преобразование.
Для уменьшения объема оборудования и стоимости аналого-цифровые (АЦП) и цифро-аналоговые (ЦАП) преобразователи производятся одноканальными, а для поочередного подключения сигналов от каждого датчика к общему АЦП используются коммутаторы.-
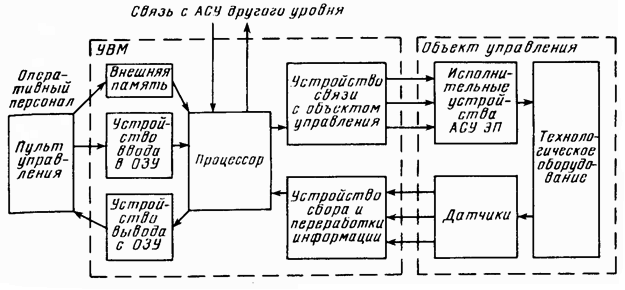
Рис. 5.1. Структура автоматизированного технологического комплекса