27. Построение механической характеристики тад по паспортным данным.
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f(M). Эту характеристику (рис. 2.15) можно получить, используя зависимость M = f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.

Рис. 2.15
Так как S = (n0 - n) / n0, отсюда n = n0(1 - S). Напомним, что n0 = (60 f) / p – частота вращения магнитного поля.
Участок 1-3 соответствует устойчивой работе, участок 3-4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Мн и nн. Точка 3 соответствует критическому моменту Мкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Мпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1: n0 = (60 f) / p,
где: р – число пар полюсов машины;
f – частота сети.
Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
здесь: Рн – номинальная мощность (мощность на валу).
Точка 3 с координатами Мкр nкр. Критический момент рассчитывается по формуле Мкр = Мн λ. Перегрузочная способность λ задается в паспорте двигателя nкр = n0 (1 - Sкр), , Sн = (n0 - nн) / n0 – номинальное скольжение.
Точка 4 имеет координаты n=0 и М=Мпуск. Пусковой момент вычисляют по формуле Мпуск = Мн λпуск,
где: λпуск – кратность пускового момента задается в паспорте.
Асинхронные двигатели имеют жесткую механическую характеристику, т.к. частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
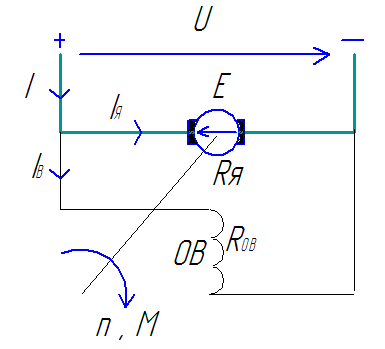
28. Устройство и принцип работы двигателя постоянного тока. Эл. Маг. Момент, эдс и ток обмотки якоря двигателя.
Двигатели постоянного тока.
Являются эл. Машинами обратимыми, могут работать как в режиме двигателя, преобразуя эл. Энергию в механическую, так и в режиме генератора – совершая обратную работу. В настоящее время в подавляющем большинстве случаев используются в качестве двигателя.
Преимущества ДПТ по сравнению с АД: 1) возможность плавного, в широких диапазонах, регулирования скорости. 2) значительно более высокие значения пускового момента. Недостатки: Меньшая надёжность в основном из-за наличия щеточно-коллекторного узла. Машина требует повышенного внимания от обслуживающего электрика.
Устройство ДПТ.
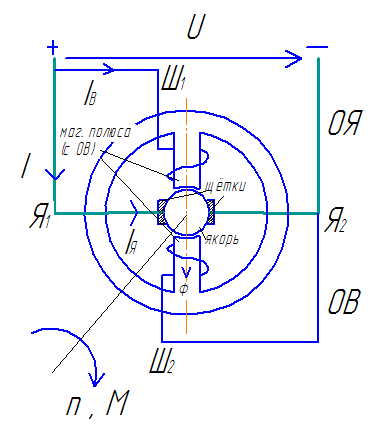
Неподвижная часть машины – статор – с главными маг. полюсами ( это сердечник, который притянут болтом к статору, с обмоткой возбуждения ОВ, служит для создания рабочего маг. поля машины с потоком Ф).
Вращающаяся часть машины – якорь – с обмоткой якоря ОЯ. Щётки нужны для создания эл. Контакта между обмоткой вращающегося якоря и внешней эл. цепью.
На рис. Обмотка возбуждения включена параллельно обмотке якоря. ОВ|| ОЯ. Такой двигатель – двигатель с параллельным возбуждением.
Принцип работы ДПТ.
При работе синхронной машины в качестве двигателя обмотка якоря подключается к источнику трёхфазного тока, в результате чего возникает вращающий маг. поток Ф. После разгона ротора до частоты вращения n, близкой к частоте вращения n0 поля якоря, его ОВ подключается к источнику постоянного тока и возникает маг. поток Ф0 . Благодаря взаимодействию Ф0 и проводников обмотки ротора (или полюсов намагниченных сердечников якоря и ротора) возникает вращающий эл. маг. момент, действующий на ротор, и он втягивается в синхронизм, т.е. начинает вращаться с частотой вращения, равной частоте вращения магнитного поля якоря n0. Существенной особенностью синхронного двигателя в отличие от асинхронного является то, что вращающий момент возникает у него в том случае, когда частота вращения ротора n равна частоте вращения n0 магнитного поля якоря. Объясняется это тем, что ток в обмотке возбуждения синхронного двигателя появляется не в результате эл. маг. индукции (как в обмотке ротора асинхронного двигателя), а вследствие питания обмотки возбуждения от постороннего источника постоянного тока.
Электромагнитный момент машины.
 Закон
Ампера
Закон
Ампера
 =>
=>

Если момент, развиваемый двигателем, будет больше момента сил сопротивления, то будет ускорение, двигатель разгоняется.
Определим направление вращения двигателя с помощью правила правой руки. Правилом левой руки определяем направление момента (силовые линии в ладонь, 4 пальца по направлению тока, большой палец – вращение проводника)
Во
вращающейся обмотке якоря индуктируется
ЭДС. По закону эл. маг. индукции:

 - ЭДС якоря.
- ЭДС якоря.
Направление индуктированной ЭДС определяется правилом правой руки (в ладонь маг. поле, 4 пальца по направлению ЭДС, большой палец по направлению движения).
Видим, что направление индуктированной ЭДС в ОЯ навстречу направлению тока – эта ЭДС имеет название противоЭДС.