

50. Условие соседства и соосности планетарных редукторов (сущность и вывод формулы)

Для создания работоспособной ступени планетарного механизма необходимо соблюдать три условия: соосность, соседство, собираемость.
Условие соосности обеспечивает достаточное и постоянное межцентровое расстояние между колесами.
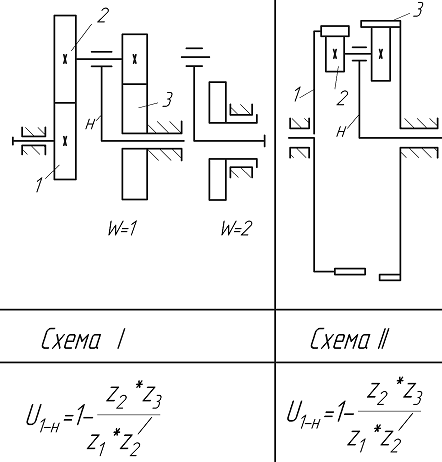
Для схемы I (см. рис. 6.4) межосевые расстояния между осями валов 1 и 2, а также осями 2 и 3
 ,
или
,
или
 ,
,
откуда
 .
.
Для
схемы II
это условие выглядит как
 ,
для схемы III
–
,
для схемы III
–
 ,
для схемы IV
–
,
для схемы IV
–
 .
.
Условие
соседства
обеспечивает
размещение на одной окружности нескольких
сателлитных колес с некоторым зазором
 между ними (рис. 6.6).
между ними (рис. 6.6).
Пусть K – количество сателлитов, тогда условие соседства можно выразить неравенством
 ,
,
г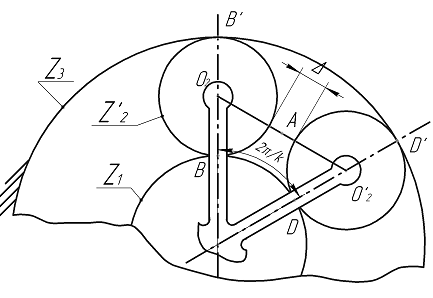 де
де
 – радиус окружности выступов сателлита.
– радиус окружности выступов сателлита.
Рис. 6.6. Размещение соседних сателлитов планетарной передачи
Так как
 ,
,
 ,
,
то
 ,
или
,
или
 .
(6.4)
.
(6.4)
Неравенство (6.4) представляет собой условие соседства.
51. Условие сборки многосателлитных планетарных редукторов (сущность и вывод формулы)
У
словие
собираемости
обеспечивает возможность зацепления
всех сателлитных колес с центральными
колесами при постоянстве угла между
сателлитами. При этом следует обеспечить
такое условие, чтобы колеса вошли в
зацепление строго в точках В и В’, D
и D’
(см. рис. 6.6). Выведем условие собираемости.
Пусть колесо 1 повернется на угловой
шаг
 .
Так как
.
Так как
 ,
то водило повернется на угол
,
то водило повернется на угол
 .
.
В
пределах угла
 угол
угол
 должен располагаться целое число раз,
т.е.
должен располагаться целое число раз,
т.е.
 ,
где C
– целое число. Так как
,
где C
– целое число. Так как
 ,
то
,
то
 .
(6.5)
.
(6.5)
Равенство (6.5) представляет собой условие собираемости планетарной передачи.
52. Что называется дифференциальным механизмом? Начертить схему.
Д
ифференциальные
механизмы служат для разложения или
сложения движения. Степень их подвижности
 .
Например, если звено 3(схема I)
планетарного механизма сделать подвижным
(дать ему возможность вращаться), то
число низших кинематических пар
.
Например, если звено 3(схема I)
планетарного механизма сделать подвижным
(дать ему возможность вращаться), то
число низших кинематических пар
 будет равно 4 (они образованы звеньями
0 и 1, 2 и H,
H
и 3, 3 и 0), а число высших кинематических
пар
будет равно 4 (они образованы звеньями
0 и 1, 2 и H,
H
и 3, 3 и 0), а число высших кинематических
пар
 будет равно 2 (они образованы звеньями
1 и 2, 2 и 3). Количество подвижных звеньев
n
равно 4 (это звенья 1, 2, 3 и H).
Тогда
будет равно 2 (они образованы звеньями
1 и 2, 2 и 3). Количество подвижных звеньев
n
равно 4 (это звенья 1, 2, 3 и H).
Тогда
 .
.
Если ведущим является центральное колесо 1, то мощность с него будет передаваться и распределяться на два звена одновременно – на водило H и колесо 3, которые будут выходными. И наоборот, любые два из этих звеньев, будучи ведущими, могут передавать мощность на одно ведомое.
53. Сравнительная оценка планетарных и рядовых редукторов
Рядовой зубчатый механизм – это последовательно соединенные несколько ступеней зубчатых колес (рис. 6.2).
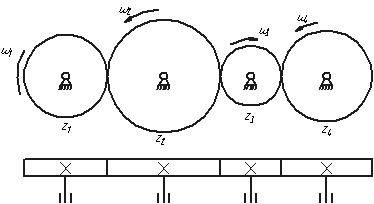
Рис. 6.2. Рядовой зубчатый механизм
Согласно
определению, передаточное отношение
равно отношению угловых скоростей
входного и выходного валов:
 ,
а передаточные отношения ступеней –
,
а передаточные отношения ступеней –
 ,
,
 ,.
,.
Перемножим
левые и правые части этих выражений и
приравняем их друг к другу: .
.
Запишем
обобщенную формулу вычисления
передаточного отношения
 ,
(6.1)
,
(6.1)
где n – количество валов; k – количество ступеней.
Так
как
 ,
то формула расчета общего
,
то формула расчета общего
передаточного отношения рядового механизма выглядит как
 .
.
Отсюда следует, что его величина зависит только от количества зубьев входного и выходного колес. Промежуточные колеса служат лишь для увеличения межосевого расстояния и изменения направления вращения.