

Оглавление
Введение. 3
1. Описание объекта управления. 4
2. Описание технологического процесса. 6
3. Описание микропроцессорного комплекта 7
4. Описание микросхемы К572ПВ4 (8-р. АЦП) 19
5. Описание микросхемы КР1554ИР22 21
6. Описание микросхемы КР580ИР82 21
7. Параллельный порт ввода/вывода КР580ВВ55 22
8. Функциональная схема 25
9. Принципиальная схема МП СУ транспортным модулем участка 28
10. Алгоритм работы 31
11. Управляющая программа 34
12. Расчет надежности 37
Список литературы 39
Введение.
В настоящее время все большую актуальность стали приобретать процессы автоматизации всего технического оборудования, применяемого в станках, машинах и механизмах, робототехнических комплексах. Благодаря внедрению в производство новых технологий, существенно повышается производительность труда, причем доля ручного труда по сравнению с автоматизированным значительно уменьшается. Повышается технический уровень выпускаемой продукции, существенно улучшается ее качество. Кроме того это дает возможность заменить тяжелый и монотонный ручной труд на машинный. Все это, невозможно было бы осуществить без микропроцессорных вычислительных средств. Приборы, которые выполнены с применением микропроцессоров, имеют более высокие показатели в работе по сравнению с приборами выполненными на отдельных логических схемах, причем стоимость и время разработки СУ на основе первых значительно меньше.
МикроЭВМ представляет из себя микропроцессорную систему, в которой процессорные системы дополняются элементами памяти, средствами ввода/вывода информации и другими устройствами, способствующими обработке данных и управлению работой. Сам кристалл носит название микропроцессора. Микропроцессор представляет собой цифровое функционально законченное устройство в виде одной или нескольких БИС, способное выполнять разнообразные операции по обработке информации в соответствии с хранимой в памяти программой.
Микропроцессоры чаще всего используются в блоках управления технологическими процессами или измерительными приборами.
В этом проекте представлена разработка микропроцессорной системы управления на основе микропроцессорного комплекта серии 1882 транспортным модулем участка, в качестве которого было выбрано устройство робокарного транспортирования.
1. Описание объекта управления.
В настоящее время в транспортно-накопительных системах ГПС получают широкое применение безрельсовые самодействующие транспортные тележки, так называемые робокары. Они являются универсальным средством для выполнения межучастковых и межоперационных транспортных операций. По сравнению с другими средствами транспортирования они малогабаритны, имеют большой диапазон скоростей перемещений с автоматизацией направления перемещений, с автономностью управления; проезды (трассы) могут быть использованы для других видов транспорта.
Возможности безрельсовых грузонесущих автоматических транспортных тележек (робокар) очень широки из-за простоты создания новых транспортных путей и оснащения робокар погрузочно-разгрузочными автоматизированными устройствами. Ряд зарубежных фирм и предприятий СССР выпускают транспортные тележки подобного типа.
Робокары — это автоматически адресуемые тележки с электронным управлением, перемещающиеся непосредственно по полу, оснащенные устройствами для приема и передачи спутников с деталями и поддонов. Среди отечественных конструкций находят применение автоматические тележки типа "Электроника", МП-12Т (Рис.1.).
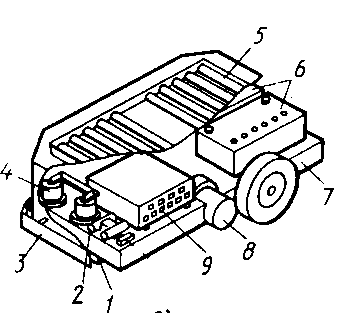
Рис. 1. Робокара МП-12Т
Данная робокара, предназначена для транспортирования обрабатываемых изделий с общей массой до 20 кг, показана на рисунке. Скорость транспортирования до 2 м/с. Габаритные размеры робокары: длина — 0,8, ширина — 1,5, высота — 0,6 м, масса — 200 кг.
Робокара выполнена на базе стандартных узлов с трехколесным шасси 7. Электромеханический привод главного движения 8 представляет собой электродвигатель постоянного тока с планетарным редуктором. В приводе поворота 4 использован волновой мотор-редуктор с электродвигателем постоянного тока при напряжении питания 24 В. Питание электродвигателей главного движения и привода поворота осуществляется от аккумуляторов 6.
Грузовая платформа 5 представляет собой поворотный стол с двумя фиксированными положениями.
9 - cистема управления. Применяется система слежения за маршрутом индукционного типа 7, состоящая из 2х датчиков Холла. Робокара движется по заранее определенному маршруту, который намечен вмонтированными в пол магнитопроводами.
Безопасность эксплуатации обеспечивается механическим отключением привода 3 от дуги, срабатывающего в случае касания ею препятствия. Концевой выключатель 2 определяет место остановки робокары для обслуживания технологического оборудования. Он расположен таким образом, чтобы однозначно отличить место остановки от случайно возникшего препятствия. Для определения времени начала движения планируется использовать датчик груза на грузовой платформе.