

3. Динамический анализ машин и механизмов
3.1. Задачи динамики машин
Динамика изучает движение с учетом действия сил инерции и инерционных свойств тел. В этом ее отличие от кинематики, которая занимается изучением собственных свойств движения и имеет только вспомогательное значение при решении динамических задач.
В динамике машин, как и в общей динамике, следует различать две задачи, прямую и обратную. Прямая задача состоит в том, что по заданным силам находится закон движения звеньев. Обратная задача состоит в том, что по заданному закону движения находятся силы, вызвавшие это движение. В математическом отношении прямая задача сводится к интегрированию дифференциальных уравнений, обратная задача – к дифференцированию или к простому решению алгебраических уравнений.
К прямым задачам относятся рассматриваемые здесь задачи об истинном движении механизма, о регулировании хода машины, задача о маховике, к обратным задачам – силовое исследование механизма, уравновешивание роторов и механизмов. Динамические задачи можно решить лишь в том случае, если известны силы или известны движения. Поэтому в самом начале следует четко определить тип решаемой задачи.
3.2. Классификация сил в механизмах
При работе на механизм действуют силы различной природы, поэтому целесообразно произвести их классификацию.
P – движущая сила
Движущей называется сила, которая приложена к механизму со стороны двигателя и вызывает движение механизма. Движущая сила совершает положительную работу, так как ее направление всегда совпадает с направлением перемещения. Звено, к которому приложена движущая сила, называется ведущим. Движущая сила ( или момент), как правило, является функцией угловой скорости. Такая функция носит название механической характеристики двигателя. В качестве примера представлены механические характеристики двигателя внутреннего сгорания ( рис.3.1а ) и асинхронного электродвигателя (рис.3.1б).
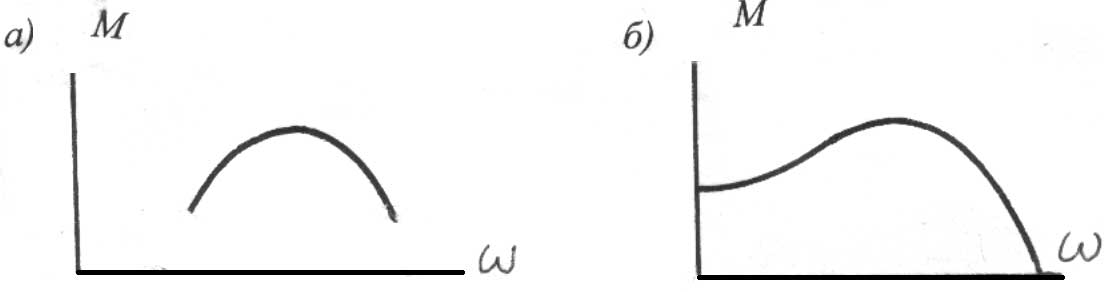
Рис. 3.1. Механические характеристики двигателей
Q – сила полезного сопротивления.
Силой полезного сопротивления называется сила, для преодоления которой предназначен механизм. Она приложена к ведомому звену со стороны внешних объектов. Природа этой силы может быть различной: сила резания, сила трения, сила упругости, сила гидравлического сопротивления и т.д. Работа силы полезного сопротивления всегда отрицательна. Сила полезного сопротивления тоже может являться функцией кинематических параметров.
F – сила вредного сопротивления.
Силами вредного сопротивления являются силы трения в кинематических парах, силы гидравлического и аэродинамического сопротивления. Работа этих сил отрицательна. При проектировании механизмов стремятся уменьшить эти силы, однако полностью избавиться от них невозможно.
G - сила тяжести.
Сила тяжести выражается через массу тела по формуле G = mg. Она приложена к телу в центре масс. Работа силы тяжести при опускании центра масс положительна, при поднимании - отрицательна. Работа силы тяжести за полный цикл движения механизма равна нулю.
R – сила реакции в кинематической паре.
Действие одного звена на другое проявляется в виде реакции. По своей природе реакция является силой упругости. Согласно 3-му закону Ньютона реакции двух взаимодействующих тел равны по величине и противоположны по направлению. Для механизма в целом работа сил реакции равна нулю.
U – сила инерции.
Объяснить сущность понятия «сила инерции» гораздо сложнее, чем всех остальных сил. В то же время это чрезвычайно важно для понимания динамических процессов. Поэтому рассмотрим эту силу более обстоятельно.
3.3. Сила инерции
Согласно 2-му закону Ньютона, ускорение, сообщаемое телу, пропорционально действующей силе, направлено по этой силе и обратно пропорционально массе тела:
a = F/m или F = ma . (3.1)
Этот закон справедлив только в инерциальных системах отсчета, т.е. в системах покоящихся или движущихся равномерно, прямолинейно относительно абсолютной мировой системы отсчета. В качестве таковой принимают систему с началом в центре Солнца и осями, направленными на три звезды. Земля с некоторым приближением также считается инерциальной системой. Иногда удобно изучать движение в неинерциальной системе отсчета, т.е. движущейся относительно Земли с ускорением. Для этого случая механика Ньютона, вообще говоря, непригодна. Однако оказалось возможным ее исправить, введя лишь некоторые поправки. Пусть на тело массой m, находящееся в сложном движении, действует сила F. В неподвижной (инерциальной) системе координат xy справедлив закон Ньютона:
F = ma, где a - ускорение в системе xy. С учетом кинематической теоремы Кориолиса можно записать:
F = m ( aE + aK + aR).
Перепишем полученное выражение следующим образом:
F - m( aE + aK) = m aR . (3.2)
Эта зависимость определяет закон движения в переносной неинерциальной системе ξη. Основываясь на аналогии с формулой (3.1), ее можно рассматривать как закон Ньютона для неинерциальной системы. Для этого следует рассматривать левую часть формулы (3.2) как силу. Выражение
U= - m ( aE + aK)
называют силой инерции. Если тело покоится в системе ξη, то
aK = aR = 0, тогда
F - maE = 0, F + U = 0.
Таким образом, мы приходим к принципу Даламбера: сумма активной силы F и силы инерции U, приложенных к телу, равна нулю. Принцип Даламбера позволяет динамическую задачу свести к задаче на равновесие сил, т.е. к задаче статики.
Более подробно о принципе Даламбера.
Механизм представляет собой систему связанных между собой материальных тел, обычно называемых звеньями. Движение каждого звена происходит под действием приложенных к нему активных сил и реакций связей со стороны соседних звеньев. Реакции связей есть силы более сложной структуры, чем активные силы. Если активные силы полностью определены внешними условиями и от движения звеньев не зависят, то реакции связей зависят как от внешних сил, так и от движения звеньев.
Для механизма на основе второго закона Ньютона можно составить столько дифференциальных уравнений, сколько подвижных звеньев у механизма. Задача получается очень сложной.
Полученная система уравнений в принципе может быть решена только в том случае, если известны зависимости реакций связей от координат точек системы (от конфигурации системы), т.е. упругость связей.
Обойти возникающее затруднение смог Даламбер, предложивший метод, носящий название «принцип Даламбера.» Если нельзя вычислить реакции связей, то их надо исключить, составив специальным образом уравнение движения.
В принципе Даламбера, прежде всего, вводится гипотеза об абсолютно жестких связях. В реальных механизмах эта гипотеза вполне оправдана, так как упругость связей, в связи с малой деформацией звеньев, практически не изменяет движение.
Следующим моментом в принципе Даламбера является сведение задачи о движении к задаче о равновесии . Это уже было рассмотрено выше. Таким образом имеем:
F -m + R = 0.
Отсюда видно, что вектор (F-m) уравновешивается силами, действующими со стороны связей. Поэтому к вектору (F-m) можно применить принцип возможных перемещений, состоящий в том, что в случае равновесия системы сил, сумма работ всех сил, приложенных к телу на возможном перемещении, равна нулю. Это является третьим моментом в принципе Даламбера. Из получившихся уравнений реакции связей исключаются, так как при абсолютно жестких связях, перемещение в направлении сил, действующих со стороны связей, невозможно.
Принцип Даламбера не вводит никаких новых сил. До Даламбера представление об абсолютно жестких связях применялось редко. После Даламбера это представление стало широко использоваться, так как оно очень упрощало задачу и, вместе с тем, позволяло достаточно точно описать движение. В дальнейшем в формулировку принципа Даламбера стали вводить термин «силы инерции», называя этим словом вектор -m. Однако для неподвижного наблюдателя никаких сил, кроме активной силы F и реакции R, нет, поэтому выражение -m вообще не сила. Если бы –m признать силой, то оказалось бы, что сумма всех сил равна нулю, но, несмотря на это, тело обладает ускорением, отличным от нуля, кроме того, неизвестно, откуда эта сила взялась, т.к. нет других тел, которые могли бы ее вызвать.
Однако приведенным разъяснением не исчерпываются все интерпретации принципа Даламбера, в связи с чем и возникают различные понимания авторами этого принципа и споры вокруг термина «силы инерции». Одна из точек зрения состоит в следующем. Поскольку тело М движется с ускорением , то это означает, что оно находится под действием сил со стороны других тел, равнодействующая которых равна m. Это означает, что, согласно третьему закону, ускоренное тело М действует на ускоряющее тело с силой –m. Выражение –m может быть названо силой инерции, и оно на самом деле является силой. Однако эта сила приложена к ускоряющим телам, а не к ускоряемому телу М. Поэтому принцип Даламбера можно интерпретировать и так: если к ускоряемому телу М приложить активную силу F, силу реакции R и силу инерции –m, то они в сумме дают нуль, т.е. уравновешивают друг друга. Однако это равновесие является фиктивным, т.к. мы получаем нуль в результате сложения сил, действующих на разные тела. Поэтому часто в формулировку принципа Даламбера к термину «силы инерции» добавляют «фиктивные».
Резюмируя сказанное, сделаем вывод, что можно вкладывать различный смысл в понятие «силы инерции», однако в каждом случае следует пояснять ту точку зрения, с которой это понятие введено. В противном случае — неизбежна путаница.
При решении динамических задач возможны два подхода – с точки зрения наблюдателей, находящихся в инерциальной и неинерциальной системах. Первый наблюдатель для объяснения явления использует 2-ой закон Ньютона, второй наблюдатель – принцип Даламбера, для чего ему нужно дополнительно к активным силам ввести силы инерции. Оба подхода являются справедливыми и дают правильное решение.
Рассмотрим, например, круговое движение тела, закрепленного на нити. С точки зрения неподвижного наблюдателя в системе xy движение тела по круговой траектории происходит под действием реакции нити, направленной к центру вращения и действующей в соответствии с законом:
R = ma,
где a = ω2 R - ускорение центра тяжести тела.
R - носит название центростремительной силы.
Для наблюдателя, находящегося в системе ξη, тело m не движется. Это возможно только потому, что на него действуют две силы R и U, находящиеся в равновесии. Сила инерции U называется в этом случае центробежной силой.
Для решения обратных задач динамики более удобным является второй подход, так как он приводит к рассмотрению условия равновесия сил. Это объясняет причину широкого использования в технических расчетах сил инерции.
Пример 1. Тело М совершает вращательное движение вокруг некоторой точки О. Такое движение можно осуществить разными способами, но всегда должна существовать связь, обуславливающая окружную траекторию точек тела. Эту связь можно осуществить, например, с помощью нити (3.2).
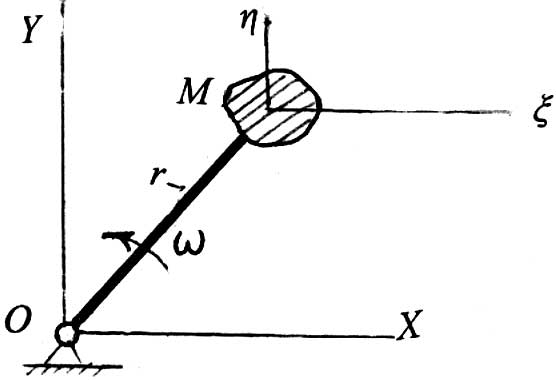
Рис. 3.2. Связь с помощью нити
Предположим, что телу М посредством толчка сообщен начальный импульс в направлении, касательном к окружной траектории. Требуется объяснить равномерное вращательное движение. Существование связи проявляется в виде реакции, т.е. в виде внешней силы, действующей на тело М. Эту силу должен принимать во внимание как инерциальный, так и неинерциальный наблюдатель. Но для неинерциального наблюдателя тело М неподвижно, т.к. его система отсчета жестко связана с телом. Это возможно лишь в том случае, если равнодействующая всех сил, приложенных к телу, равна нулю. Значит, кроме реакции, на тело действует еще одна сила, равная реакции связи, но противоположно направленная. Это сила инерции. Поскольку тело М неподвижно в неинерциальной системе отсчета , сила инерции представляется только одной составляющей — переносной силой инерции Ue. Для определения ее величины и направления нужно знать величину и направление переносного ускорения еМ. При любом варианте выбора подвижной системы переносное ускорение совпадает с центростремительным ускорением центра тяжести тела М при его равномерном движении по окружной траектории.
На основании вышеизложенного определяются сила инерции
ue = - m2r
и реакция связи
R = m2r.
Для наблюдателя, находящегося в неподвижной системе отсчета xy, никаких сил инерции не существует, но зато тело М движется по окружной траектории и, следовательно, обладает ускорением. Единственная сила, приложенная к нему — реакция связи. Она и объясняет наличие ускорения. Действительно, реакция связи, осуществляемой нитью, может быть направлена только по нити к центру, что и обуславливает появление в этом направлении ускорения. Поскольку это ускорение всегда направлено к центру, оно называется центростремительным. Величина его, как известно из кинематики, равна 2r.
В приводимых объяснениях пока не ясна причина возникновения реакции связи. После начального толчка тело, двигаясь в направлении импульса, т.е. касательно к окружной траектории, растягивает нить. Это растяжение продолжается до тех пор, пока возникающая при этом сила упругой деформации нити не сообщит телу ускорение, необходимое для осуществления движения по окружности. Нить при этом, вообще говоря, увеличивает свою длину по сравнению с первоначальной. Но обычно предполагается, что связь достаточно жесткая и этой деформацией пренебрегают. Однако существование этой деформации принципиально важно для объяснения наблюдаемого движения.
Величину реакции связи можно определить исходя из того, что известно центростремительное ускорение центра тяжести тела М:
R = m2r.
Эту реакцию иногда называют центростремительной силой, т.к. она обуславливает центростремительное ускорение. Природа центростремительной силы в упругой деформации связи. Неинерциальный наблюдатель, имеющий дело с равновесием сил, вторую силу, силу инерции, естественно, может называть центробежной силой, отчего она не перестает быть силой инерции.
Пример 2. Основываясь на вышеизложенном, объясним причины разрушения связей, в частности разрушение быстровращающихся маховиков и шлифовальных кругов.
Всякое вращательное движение связано с деформацией связи, причем, чем больше ускорение тела, тем больше деформация связи. Величина ускорения может быть какой угодно, а величина деформации не может превышать допустимую из условия прочности связи. Если начальный импульс будет слишком велик за счет сообщения очень большой скорости телу, то это приведет к очень большому ускорению в последующем вращательном движении. Это вытекает из того, что величина сообщенной телу скорости должна сохраниться и во вращательном движении, а это в случае достаточно жесткой связи возможно лишь за счет большой угловой скорости. Связь разрушится из-за несоответствия допустимой деформации и ускорения, обусловленного начальным импульсом.
Если большая скорость телу М сообщена путем постепенного увеличения угловой скорости, как это имеет место в случае быстровращающихся маховиков и шлифовальных кругов, разрушение их происходит из-за невозможности обеспечить требуемое ускорение посредством связи, обладающей ограниченной деформационной способностью.
Таким образом, не появление каких-то дополнительных сил является причиной разрушения маховиков и шлифовальных кругов, а, наоборот, отсутствие возможности обеспечить необходимую упругую силу посредством деформируемой связи.
Приведенное объяснение является точкой зрения инерциального наблюдателя, но вывод справедлив и для неинерциального, т.к. и в этом случае сила инерции является не причиной, а следствием возникающего движения с ускорением. Само движение возможно лишь при выполнении тех же условий, что и для инерциального наблюдателя.
Пример 3. Тело М помещено с возможность перемещения на прямолинейном рычаге 1, вращающимся с угловой скоростью . Траектория движения центра тяжести тела М представляет некоторую кривую (рис. 3.3).
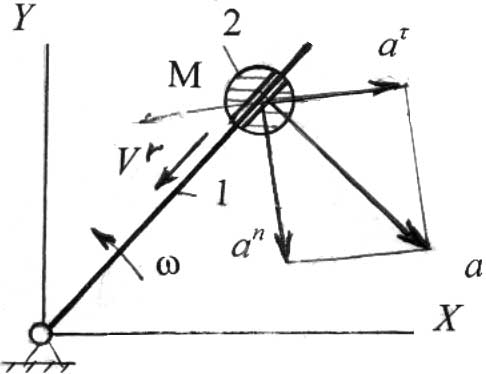
Рис. 3.3. Вращение на прямолинейном рычаге
Инерциальный наблюдатель в системе xy наблюдает движение по кривой с ускорением. Полное ускорение a может быть разложено на нормальное an, направленное внутрь кривой, и касательное a вдоль кривой. Сила, вызывающая ускорение a, есть реакция со стороны рычага 1. Так как в отсутствии сил трения направление реакции перпендикулярно рычагу, всегда можно указать направление полного ускорения .
Неинерциальный наблюдатель, связанный с подвижной системой координат (рис.3.4), также наблюдает движение тела М и объясняет его действием реакцией R и силы инерции U.
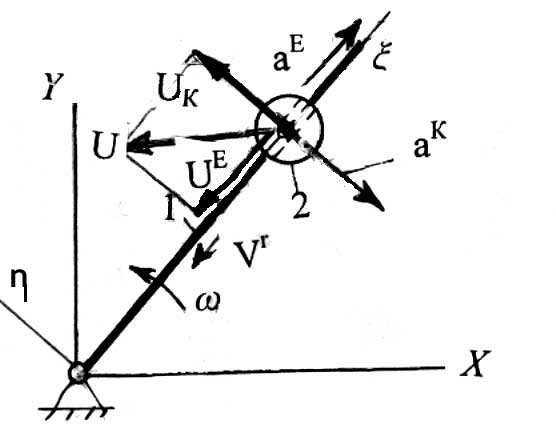
Рис. 3.4. Направление сил инерции
Поскольку наблюдаемое им движение происходит вдоль прямолинейного рычага, также должна быть направлена и результирующая сила. Сила инерции в данном случае представлена переносной и кориолисовой силами инерции. Переносное и кориолисово ускорения, определяемые по известным правилам, указаны на рис. 3.4.
3.4. Силы инерции в поступательном, вращательном
и сложном движении
Пусть тело находится в поступательном движении с ускорением. На каждую точку этого тела действуют равные и одинаково направленные силы инерции. Имеем систему равных и параллельных сил. Как известно из теоретической механики, такую систему сил можно привести к одной силе, приложенной в центре масс и равной
U = - maS .

Рис. 3.5. Силы инерции в поступательном, вращательном и сложном движении
Пусть тело вращается вокруг точки О с угловой скоростью ω и угловым ускорением ε. На каждую точку этого тела действует сила инерции, которую можно представить состоящей из касательной и нормальной составляющих силы инерции. В теоретической механике доказывается, что такая система сил приводится к главному вектору и главному моменту сил инерции. Главный вектор сил инерции приложен в центре масс и вычисляется по формуле
U = - maS,
где aS – ускорение центра масс.
Главный момент сил инерции вычисляется по формуле
MU = - JS ε ,
где JS – момент инерции тела относительно оси, проходящей через центр масс перпендикулярно плоскости движения. Момент инерции вычисляется как интеграл вида:
JS = ∫ mi ρi2,
где ρi - расстояние от точек, образующих в совокупности данное тело, до центра масс – точки S. Момент инерции зависит как от массы, так и от формы тела, т.е. он определяет геометрию масс. Моменты инерции тел различной формы приводятся в справочниках. Для тела типа стержня
JS = mL2/ 12,
где L - длина стержня.
Для диска
JS = m R2,
где R - радиус диска.
При вращательном движении возможны следующие частные случаи.
1. Вращение вокруг центра масс. В таком случае OS = 0, следовательно U = 0, Mu = - JS ε.
2. Вращение с постоянной скоростью. В таком случае ε = 0, следовательно Mu = 0, U = - ma.
3. Вращение вокруг центра масс с постоянной скоростью. В таком случае U = 0, Mu = 0.
Сложное движение можно представить состоящим из поступательного вместе с центром масс и вращательного вокруг центра масс. При поступательном движении с ускорением возникает сила инерции U = - m aS, при вращательном движении вокруг центра масс возникает только момент сил инерции Mu = - JS ε. Таким образом, в сложном движении, как и во вращательном, имеются главный вектор сил инерции U и главный момент сил инерции Mu.
Силу и момент можно заменить одной силой. Приложим в точке К силы U и -U (рис.3.5в). Это не изменит состояния равновесия тела. Сила - U и сила U в точке S образует пару сил с моментом M = Uh. Если выбрать h из условия h = Mu / U, то момент M компенсирует момент Mu и останется одна сила U , приложенная в точке К. Для вращающегося тела, имеющего форму стержня длиной L, можно указать простой способ нахождения точки К. Разложим силу U на составляющие Uτ и Un и приложим в точке К две силы Uτ и - Uτ. Для компенсации Mu необходимо, чтобы Uτ h = M =Mu. После соответствующих подстановок найдем :
H = L / 6, OK = 2 L/ 3 .
Силы инерции звена, совершающего пространственное движение, сводятся к главному вектору, вычисляемому, как и в плоском случае, по формуле U = - m aS, и главному моменту сил инерции, который находится на основании динамических уравнений Эйлера. Проекции главного момента на главные центральные оси инерции звена находятся из уравнений:
Mux = - Jx εx - ( Jz – Jy) ωyωz ;
Muy = - Jy εz - (Jx - Jz) ωzωx ;
Muz = - Jz εz - (Jy - Jx) ωxωy ,
где Jx, Jy, Jz — главные центральные моменты инерции звена;
ωч, ωy, ωz, εx, εy, εz, -проекции вектора угловой скорости и вектора углового ускорения на главные центральные оси инерции.
Для того чтобы перейти от проекций на оси, связанные с телом, к проекциям на оси xyz, можно воспользоваться матрицей перехода от подвижных осей к осям xyz.
3.5. Силовое исследование механизмов методами кинетостатики
В тихоходных механизмах динамические эффекты проявляются незначительно, поэтому усилия можно найти на основании статического расчета, приняв во внимание только движущую силу, силы тяжести, силу трения, силу полезного сопротивления. В быстроходных механизмах следует учитывать динамические эффекты. Проще всего это сделать, если воспользоваться принципом Даламбера. Для этого нужно ко всем внешним силам добавить силы инерции и рассматривать такую систему сил находящейся в равновесии. Такой подход называется методом кинетостатики.
Силы инерции можно рассчитать по приведенным выше формулам. Ускорения центров тяжести звеньев и угловые ускорения находятся на основании кинематического анализа при заданном движении ведущего звена. Кинетостатический расчет обычно выполняется в несколько этапов. На первом этапе силами трения пренебрегают. Определив реакции в кинематических парах, находят силы трения и повторяют расчет с учетом сил трения.
Все многочисленные методы расчета можно разделить на: графические, графоаналитические, аналитические. Графические и графоаналитические методы характеризуются относительной простотой реализации. Достоинство аналитических методов – возможность получения большого объема информации. Вследствие сложности вычислительных процедур расчеты выполняются на ЭВМ.
3.6. Условие статической определимости кинематической цепи
Чтобы решить задачу силового анализа методами статики необходимо, чтобы число уравнений было больше или равнялось числу неизвестных. Это условие носит название условия статической определимости системы.
В качестве неизвестных сил в кинематической цепи выступают силы реакции. Силы, действующие на каждое звено, можно свести к одной силе и моменту, приведя их к центру кинематической пары. Разложим силу и момент на составляющие вдоль выбранных осей пары, Получим три проекции силы и три проекции момента.
Вращательная кинематическая пара (рис. 3.6а) накладывает 5 условий связей, разрешая вращение только вокруг одной оси. Тогда под действием одной составляющей момента происходит движение звена, остальные составляющие момента и силы воспринимаются связями. Таким образом, во вращательной паре имеется 5 реакций связей.
Аналогичным образом можно установить, что в цилиндрической паре 4 реакции, в сферической – 3, в паре цилиндр на плоскости – 2, в паре шар на плоскости – 1.
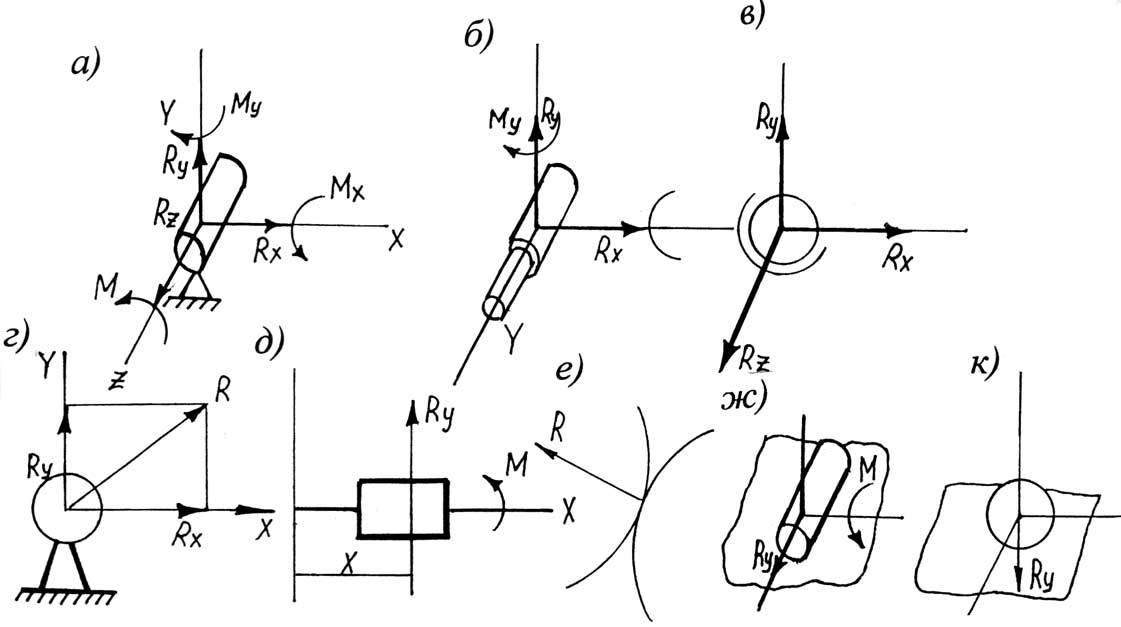
Рис. 3.6. Реакции в кинетических парах
Условие статической определимости пространственной кинематической цепи имеет вид:
6n = 5 p1 + 4 p2 + 3p3 + 2 p4 + p5 .
Это условие соответствует уравнению пространственной ассуровской группы.
Для плоской схемы во вращательной паре действуют момент и составляющие силы по осям x и y. Под действием момента происходит движение звена, силы воспринимаются связями. Таким образом, имеем две неизвестные реакции. В поступательной паре под действием составляющей силы вдоль оси x происходит движение звена, сила по оси y и момент воспринимаются связями, т.е. здесь также две неизвестные. В высшей паре действует только одна сила по нормали к поверхности в точке касания, т.е. имеется одна неизвестная.
Условие статической определимости плоской кинематической цепи
3n = 2 p1 + p2
совпадает с уравнением ассуровской группы. Отсюда можно сделать вывод, что ассуровские группы являются статически определимыми системами. Отдельно взятое звено с вращательными парами статически неопределимо, так как число уравнений меньше числа неизвестных. Два звена дают 6 уравнений при 6 неизвестных благодаря тому, что внутренние кинематические пары вносят в систему только две неизвестные. Из изложенного следует, что для выполнения силового исследования механизм нужно разложить на ассуровские группы и рассматривать их равновесие по отдельности.
3.7. Метод планов силы
Сущность метода планов сил рассмотрим на примере механизма 2-го класса с 2-мя диадами (рис. 3.7). Приложим к механизму все заданные внешние силы: момент силы полезного сопротивления MQ, силы тяжести звеньев Q, главные векторы и главные моменты сил инерции (силы инерции U и моменты сил инерции MU) , движущую силу . Движущую силу примем равной уравновешивающей силе Pур.
Под уравновешивающей силой понимают силу, уравновешивающую заданные внешние силы и силы инерции, определенные из условия равномерного вращения кривошипа. Вообще говоря, поскольку истинное движение отличается от равномерного вращения, постольку движущая сила отличается от уравновешивающей. Обычно уравновешивающую силу прикладывают в конце кривошипа перпендикулярно к нему. Уравновешивающая сила создает уравновешивающий момент относительно точки О.
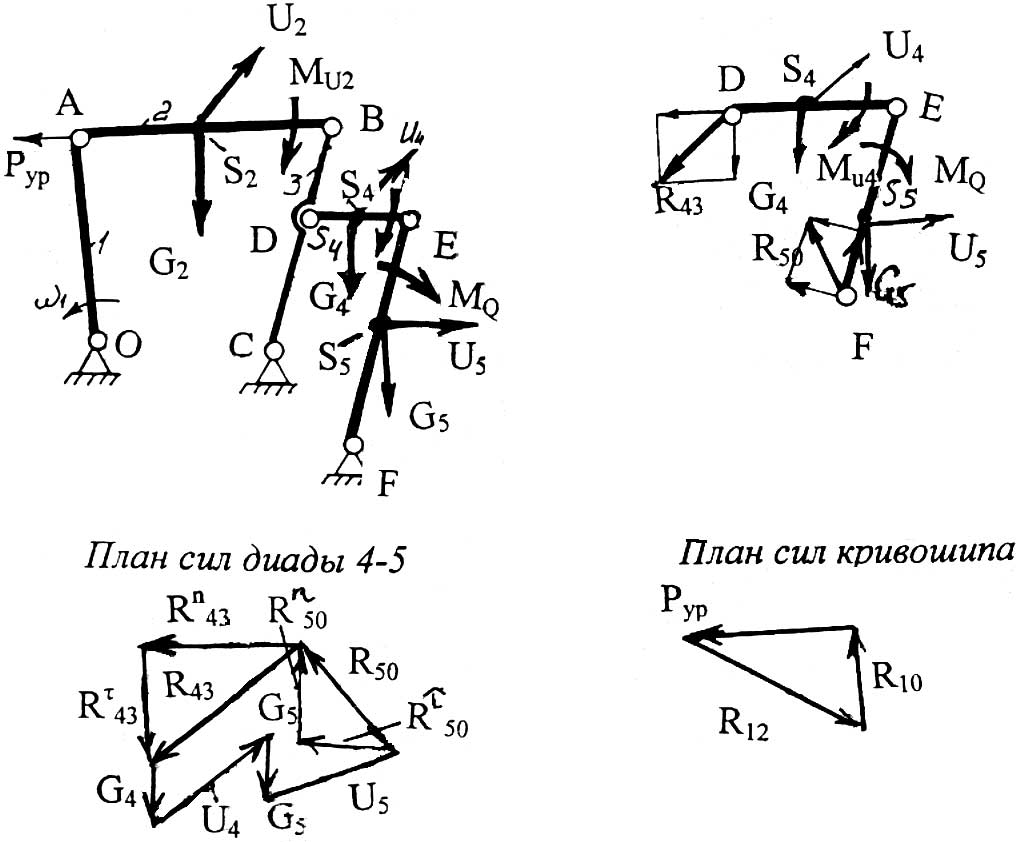
Рис 3.7. План сил шарнирного четырехзвенника
Задачей силового расчета является определение реакций в кинематических парах и уравновешивающей силы.
Выделим из механизма последнюю диаду, заменив отброшенные звенья реакциями. Условимся буквенные обозначения реакций снабжать индексами, руководствуясь правилом: первым пишется индекс, соответствующий номеру звена, на которое действует реакция, а вторым – индекс, соответствующий номеру звена, со стороны которого действует реакция.
Процедура расчета выполняется по шагам в следующем порядке.
1. Запишем уравнение равновесия диады в векторной форме:
R43 + G4 + U4 + U5 + G5 + R50 = 0 .
Это уравнение содержит две неизвестные реакции и пока не может быть решено.
2. Разложим реакции R43 и R50 на нормальные и касательные составляющие.
3. Запишем уравнение моментов всех сил, действующих на звено 4 и звено 5 в отдельности относительно точки Е.
M4E = 0 → R43τ, M5E = 0 → R50τ
В этих уравнениях по одной неизвестной R43τ и R50τ. Найдем эти неизвестные. Если они получаются со знаком минус, то это означает, что принятые направления найденных реакций следует заменить на обратные.
4. Возвратимся к исходному уравнению равновесия диады, переписав его в следующей форме:
R43n + R43τ + G4 + U4 + U5 + G5 + R50τ + R50τ = 0 .
Решим это уравнение графически. Для этого в выбранном масштабе построим многоугольник сил таким образом, чтобы неизвестные R43n и R50n были замыкающими этого многоугольника.
5. Для определения реакций во внутренней кинематической паре запишем уравнение равновесия звена 4
R43 + G4 + U4 + R45 = 0 .
В этом уравнении одно неизвестное - R45. Для его определения можно не строить отдельный векторный многоугольник, а выделить в многоугольнике диады вектора, входящие в это уравнение, и построить замыкающий вектор.
Перейдем к исследованию диады 2-3. Изобразим ее отдельно, заменив действие отброшенных звеньев реакциями. Расчет диады 2-3 выполняется точно также, как и диады 4-5.
Кривошип находится под действием уравновешивающей силы Pур, реакции со стороны 2-го звена R12, реакции со стороны стойки R10. Поскольку Pур и R12 приложены в одной точке, они дают равнодействующую, которая уравновешивается реакцией R10. Отсюда следует, что R10 направлена по звену. Уравнение равновесия кривошипа
P ур + R10 + R12 = 0 .
Из треугольника сил находятся реакции R10 и Pур.
3.8. Метод рычага Жуковского
Метод рычага Жуковского представляет геометрическую интерпретацию принципа возможных перемещений. Он применяется для плоских механизмов и позволяет определить уравновешивающую силу без предварительного определения реакций в кинематических парах. Принцип возможных перемещений (принцип Даламбера – Лагранжа) находит широкое применение в механике. Он формулируется следующим образом: работа всех активных сил и сил инерции на возможном перемещении системы равна нулю. Этот принцип эквивалентен закону сохранения энергии для механических систем. Он записывается в виде
ΣFK • δ rK = 0 , (3.3)
где в левой части стоит сумма скалярных произведений векторов сил FK на векторы возможных перемещений точек приложения этих сил δrK.
Разделим выражение (3.3) на δt:
ΣFK δrK / δt = ΣFk • Vk = Σ|FK | | VK | cos ( Fk • Vk) = 0.
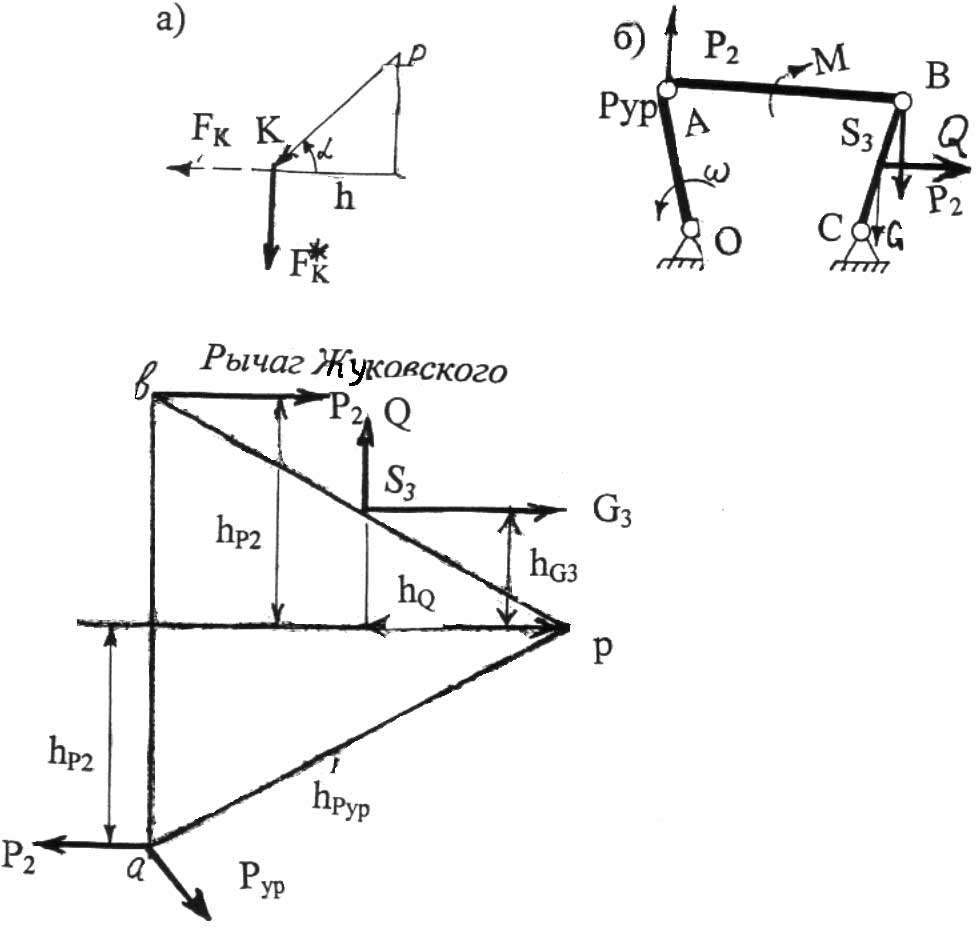
Рис 3.8. Метод рычага Жуковского
Рассмотрим элемент плана скоростей, на котором изображена скорость точки К . Приложим к точке К вектор FK*, изображающий силу FK, , повернутую на 90˚ относительно ее истинного направления. Из построения на рис. 3.8а следует:
h = pk cos α = VK cos α / kv= VK cos (FK , VK) / kv . (3.4)
Если рассматривать отрезок pk как рычаг, закрепленный в точке р, то сила FK* создает момент:
MK = FK* h = |FK* | |VK | cos (FK VK ) / kv . (3.5)
Из сравнения выражений (3.4) и (3.5) следует, что с точностью до множителя kv
ΣFK δrk / δt = ΣMK = 0 .
Полученный результат известен как теорема Жуковского:
Если в соответствующие точки плана скоростей механизма приложить все активные силы и силы инерции, повернутые на 90º в одну сторону, то сумма моментов этих сил относительно полюса плана скоростей, рассматриваемого как жесткий рычаг, равна нулю.
На рис.3.8б представлен пример использования теоремы Жуковского для определения уравновешивающей силы в шарнирном четырехзвеннике.
В этом примере для правильного учета момента М он заменен парой сил (P' = P") так, что M = P2' LAB. Уравновешивающая сила определяется из уравнения
Pур hур + P2'hp2' + P2 hp2" + G3 hG3 + Q hQ = 0 .
При составлении уравнения должно соблюдаться правило знаков: момент, действующий против часовой стрелки, - положительный, по часовой стрелке – отрицательный.
Можно повернуть план скоростей, а силы не поворачивать, результат будет тот же.
3.9. Аналитический метод силового исследования
Известно несколько аналитических методов силового исследования. Познакомимся с методом, в основе которого также лежит принцип возможных перемещений. Для шарнирного четырехзвенника, нагруженного только уравновешивающим моментом Мур и моментом сил полезного сопротивления MQ, уравнение равновесия имеет вид:
Mур δφ1 + MQ δφ3 = 0 ,
откуда следует
Mур = - MQ δφ3 / δφ1 . (3.6)
Задача сводится к чисто кинематической: нужно выразить δφ3 через δφ1 и подставить в уравнение (3.6). Зависимость δφ3 от δφ1 устанавливается при решении задачи о скоростях.
Точно также можно учитывать действие других сил. При одновременном приложении нескольких сил уравновешивающий момент равен сумме моментов, рассчитанных для отдельных сил. В этом проявляется принцип суперпозиции – независимости действия сил.
Аналитический метод, в отличие от графического, можно применять и для пространственных механизмов. Расчет, вследствие сложности расчетов, производится с использованием вычислительных машин.
3.10. Задача уравновешивания ротора
Ротором называется звено механизма, выполненное в виде тела вращения и установленное в опорах на стойке. В связи с ростом рабочих скоростей машин уравновешиванию роторов придается большое значение. Уравновешивание представляет ответственный этап при изготовлении машин. Качество машины во многом определяется ее уравновешенностью. В настоящее время строятся электродвигатели и турбомашины со скоростью вращения 100000 оборотов в минуту, центрифуги для получения биологических эмульсий со скоростью вращения до 600000 оборотов в минуту, отдельные детали в текстильных машинах вращаются со скоростью до 1000000 оборотов в минуту.
Рассмотрим следующий пример: пусть масса ротора 10 кг, угловая скорость ω = 1000 рад/с, эксцентриситет массы 0.0001 м (0.1 мм). При вращении ротора возникает сила инерции U = mω2R = 1000 н, т.е. в 10 раз больше, чем вес ротора.
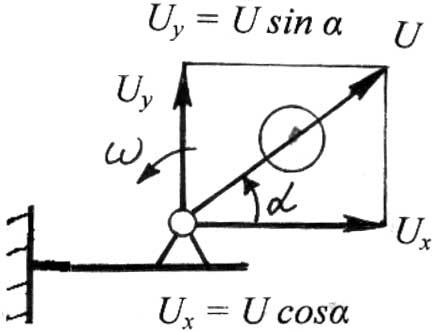
Рис 3.9. Действие неуравновешенного ротора на балку
Сила инерции передается на опоры в виде периодического воздействия. Пусть, например, неуравновешенный ротор закреплен на консольной балке (рис. 3.9). Разложим силу инерции U на составляющие Ux и Uy. Составляющая Ux из-за большой жесткости балки в направлении оси X не опасна, составляющая Uy вызывает колебания балки. Если частота вынужденных колебаний равна частоте свободных колебаний или ей кратна, может возникнуть резонанс. Резонанс характеризуется резким возрастанием амплитуды колебаний, что может привести к поломке или, в лучшем случае, будет проявляться в виде вибраций оборудования, здания и т.д.. Неуравновешенность может появиться также из-за неточности изготовления, пороков в материале и т. д. Задача конструктора – не допустить ошибок при проектировании ротора.
3.11. Статическая неуравновешенность ротора
Статической называется неуравновешенность, возникающая от того, что главная центральная ось инерции ротора проходит параллельно оси вращения. Свое название она получила потому, что она может быть обнаружена проведением статических испытаний. Рассмотрим простейшую схему статически неуравновешенного ротора (рис. 3.10 ). Подсчитаем силу инерции, развиваемую массой m
U = m ω2 e.

Рис 3.10. Схема статически неуравновешенного ротора
Силу инерции при угловой скорости ω = 1 называют дисбалансом:
D = U = m e .
Дисбаланс – произведение массы на эксцентриситет, его размерность гсм.
Задача уравновешивания – изменить распределение масс с тем, чтобы перевести центр масс на ось вращения. Тогда главная центральная ось инерции и ось вращения совпадут. Этого можно добиться, если использовать корректирующую массу mc, расположить ее на расстоянии ес противоположно массе m так, чтобы она развивала силу инерции Uc = - U или Dc = - D. Отсюда следует, что для статической уравновешенности необходимо, чтобы геометрическая сумма дисбалансов равнялась нулю
(Dc + D = 0).

Рис 3.11. Балансировка ротора на параллелях
На практике статическое уравновешивание выполняют на балансировочных станках. Обычно используются балансировочные параллели (рис. 3.11) Установленный на них ротор под действием момента сил тяжести совершает колебания относительно положения устойчивого равновесия, при котором центр масс находится в самом нижнем положении. Ротор ведет себя как физический маятник. После прекращения колебаний определяется линия, на которой находится центр масс – «тяжелое место». С противоположной стороны закрепляется пробный грузик и испытание повторяется. Ротор будет уравновешен, если он будет находиться в состоянии безразличного равновесия.
Достоинство такого метода уравновешивания – простота оборудования. Недостаток – низкая точность из-за наличия трения качения. Остаточный дисбаланс рассчитывается по формуле
Dост = m k,
где k - коэффициент трения качения.
Второй недостаток состоит в том, что таким способом нельзя обнаружить моментную неуравновешенность.
3.12. Моментная неуравновешенность ротора
Схема ротора с моментной неуравновешенностью представлена на рис. 3.12а. В том случае, если D1 = - D2, ротор статически уравновешен, однако дисбалансы, располагаясь на плече L, создадут момент M = D L, который будет воздействовать на опоры, вызывая в них реакции RA и RB. Такая неуравновешенность возникает, например, если отверстие в детали просверлено под углом к оси вращения ( рис. 3.12б ).
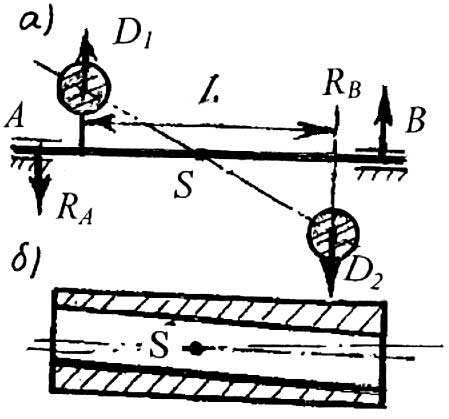
Рис 3.12. Схема ротора с моментной неуравновешенностью
Моментной называется неуравновешенность, возникающая оттого, что главная центральная ось инерции пересекает ось вращения в центре масс.
Для моментного уравновешивания необходимо добавить две корректирующие масс, такие, чтобы они создали момент дисбаланса Mm = - M. Геометрическая сумма моментов всех дисбалансов должна быть равна нулю.
Моментное уравновешивание производится на специальных станках. Такому уравновешиванию подвергаются детали большой протяженности вдоль оси. Для деталей типа зубчатых колес, шкивов, маховиков, автомобильных колес достаточно ограничиться статическим уравновешиванием.
3.13. Полное уравновешивание ротора с известным расположением масс
Статическое и моментное уравновешивание называют полным (динамическим ) уравновешиванием. Рассмотрим его на примере коленчатого вала двигателя (рис. 3.13).
Уравновешивание будем производить в такой последовательности: сначала моментное, а затем статическое.
Запишем условие моментной уравновешенности:
M1 + M2 + M3 + MM = 0. (3.7)
Здесь
M1 = D1 L1 = m1 e1 L1 ;
M2 = D2 L2 = m2 e2 L2 ;
M3 = D3 L3 = m3 e3 L3 .
Направление векторов моментов примем совпадающим с направлением векторов дисбалансов. Из уравнения (3.7) предстоит определить ММ. Решение уравнения получим построением многоугольника моментов .
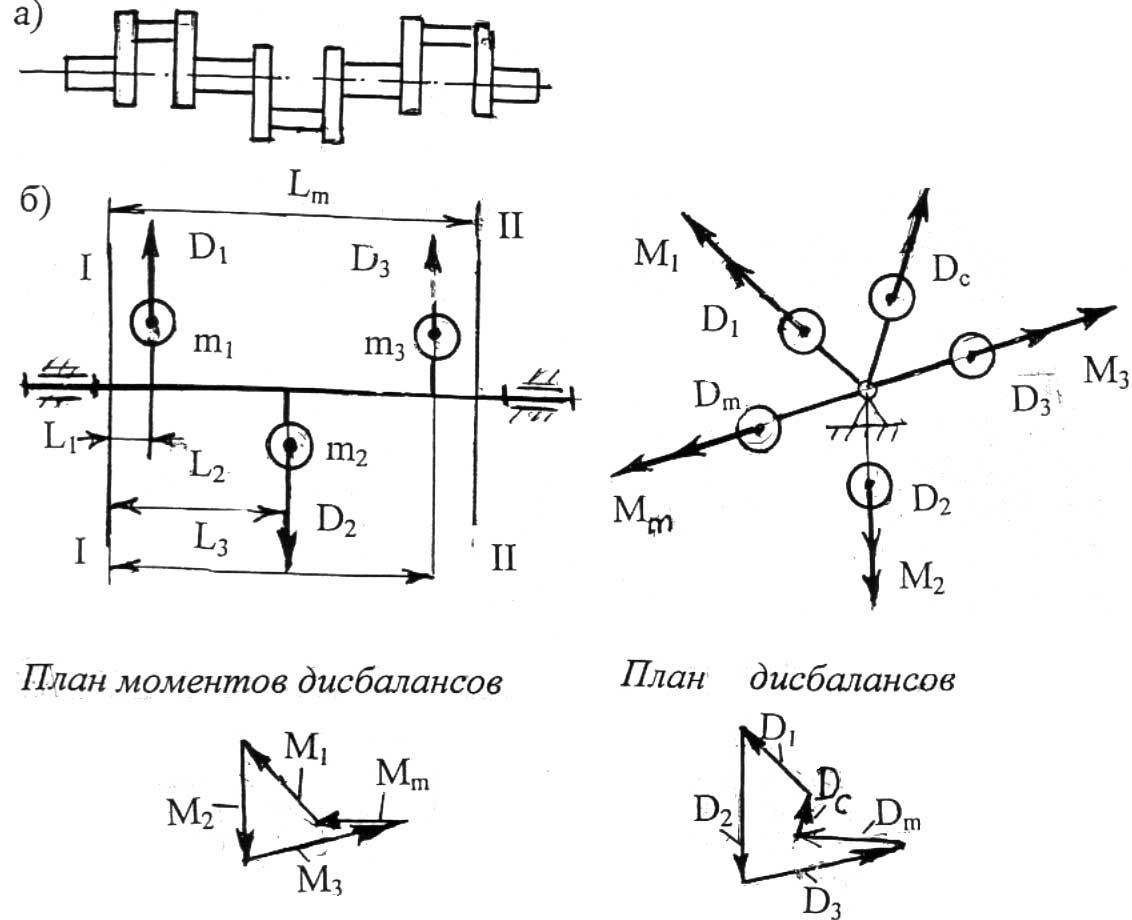
Рис 3.13. Полное уравновешивание ротора
Из построенного многоугольника моментов с помощью масштабного коэффициента определяем момент дополнительного дисбаланса ММ, который следует приложить к ротору, чтобы уравновесить его моментно.
MM = DM LM = mM eM LM .
Отсюда, задавшись LM и eM, находим mM. Корректирующую массу mM следует расположить в плоскости II – II на расстоянии eM от оси вращения в направлении, указанном вектором ММ на многоугольнике моментов.
Условие статической уравновешенности:
D1 + D2 +D3 + DM + Dc = 0 .
Построим в масштабе kD многоугольник дисбалансов, из которого найдем величину и направление Dc : Dc = mc ec. Корректирующую массу mc следует расположить в плоскости I – I на расстоянии ec от оси вращения в направлении, указанном для Dc на многоугольнике дисбалансов.
Таким образом, с помощью двух масс произведено полное уравновешивание ротора.
3.14. Балансировка на машинах
Уравновешивание на стадии проектирования не дает гарантии, что изготовленная деталь будет уравновешена. Ошибки возможны при изготовлении. Для их исправления все ответственные детали подвергаются балансировке на машинах. Конструкции машин весьма разнообразны, рассмотрим простейшую схему машины (рис. 3.14).
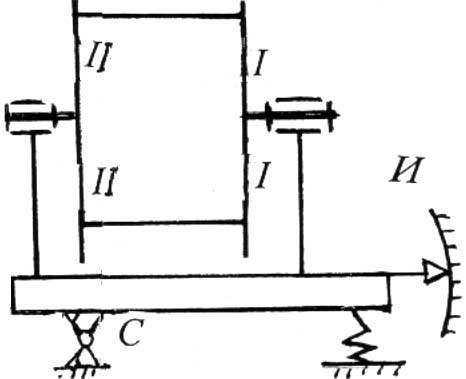
Рис 3.14. Балансировочная машина
Ротор запускается через фрикционную передачу в зарезонансный режим, а затем двигатель отключается. При прохождении резонанса возникают колебания рамы, которые регистрируются измерительным прибором И. Плоскость II – II проходит через ось качания С. Благодаря этому сила инерции в плоскости II – II уравновешивается реакцией RC. Сила инерции в плоскости I – I вызывает колебания рамы. Используя корректирующие грузы, добиваются уравновешивания сил инерции в плоскости I – I, а затем ротор переворачивается так, чтобы плоскость I – I прошла через точку С и добиваются уравновешивания в плоскости II – II. Процесс уравновешивания является трудоемким, так как требует многократных запусков ротора.
3.15. Уравновешивание механизмов
Уравновешивание механизмов производится с теми же целями, что и уравновешивание роторов. При работе механизмов возникают динамические реакции, которые могут значительно превышать статические реакции. От статических реакций избавиться нельзя, динамических можно избежать, если произвести уравновешивание механизма.
Полное уравновешивание механизма будет тогда, когда ускорение центра тяжести всего механизма равно нулю и момент сил инерции тоже равен нулю. Избежать воздействия момента сил инерции не удается, но добиться, чтобы ускорение центра масс было равно нулю, можно – нужно сделать так, чтобы он был неподвижен. При решении этой задачи используют метод замещающих масс.

Рис 3.15. Уравновешивание четырехзвенника и кривошипно-ползунного механизма
Пусть, например, требуется уравновесить плоский шарнирный четырехзвенник (рис. 3.15). Заменим массу m двумя массами mO и mA', поместим их в точки О и А, соблюдая условия
мO OS1 = mA'AS1 , ( 3.8 )
мO + mA' = m 1 .
Уравнения (3.8) образуют линейную систему относительно mO и mA', решение которой находится элементарно.
Аналогичным образом заменяется масса m3 и масса m2 :
mC = m3 BS3 / BC ; mB' = m3 CS3 / BC
; mA" = m2 BS2 / AB ; mB" = m2 AS2 / AB .
Итак, в точке А сосредоточена масса mA = mA' + mA", в точке В сосредоточена масса mB = mB' + mB". Массы в точках А и С уравновешены. Следует уравновесить массы mA и mB. Это достигается установкой дополнительных противовесов на звеньях ОА и ВС. Расчет их производится известным методом. Подобным же образом производится уравновешивание кривошипно-ползунного механизма, однако здесь остается неуравновешенной поступательно движущаяся масса ползуна. Полностью уравновешен механизм, составленный из двух кривошипно-ползунных механизмов, работающих в противофазе. Хорошо уравновешены многоцилиндровые двигатели внутреннего сгорания, хуже всех – одноцилиндровые двухтактные двигатели.
3.16 . Силы трения в механизмах. Законы трения
Уточненный силовой расчет ведется с учетом сил трения. Сила трения, является результатом взаимодействия двух тел, она тоже относится к реактивным силам. Эта сила направлена касательно к поверхностям соприкасающихся тел и препятствует движению одного тела относительно другого. Физическая природа этой силы связана с деформацией микронеровностей и наличием сил молекулярного взаимодействия. Трение такого рода называется трением скольжения. Несмотря на то, что трение есть одно из самых распространенных явлений природы, точные законы трения до сих пор не установлены из-за многочисленности факторов, определяющих трение. Поэтому используются приближенные законы, которые пригодны для большинства практических задач. Эти законы установлены Амонтоном и Кулоном.
1. Сила трения пропорциональна нормальному давлению и направлена противоположно направлению относительной скорости.
F = f N .
Коэффициент пропорциональности f называется коэффициентом трения. Поскольку для двух трущихся тел можно указать две относительные скорости Vij и Vji,, соответственно существуют две силы трения Fij и Fji, которые равны по величине и противоположны по направлению. Силы трения представляют касательные реакции для взаимодействующих тел.
2. Коэффициент трения зависит от материалов и состояния поверхностей трущихся тел. С уменьшением микронеровностей трение уменьшается. Экспериментально установлены следующие коэффициенты трения для наиболее характерных пар материалов:
сталь по стали - 0.18 ;
чугун по стали 0.20 ;
сталь по дереву 0.40 ;
ферродо по металлу 0.3 – 0.8 ;
резина по стали 0.6 – 0.8 ;
дерево по дереву 0.4 – 0.7.
3. Коэффициент трения зависит от скорости движения: сначала несколько убывает, а затем сохраняет почти постоянное значение.
4. Сила трения не зависит от удельного давления, а это значит – от площади контакта тел.
5. Коэффициент трения при движении (динамический коэффициент трения) меньше коэффициента трения при покое (статический коэффициент трения).
3.17.Трение в поступательной паре
На рис. 3.16,а представлена схема поступательной пары. Пусть к ползуну приложена сила Q, направленная перпендикулярно направляющей, и движущая сила P. Со стороны направляющей на ползун действуют нормальная реакция N и сила трения F, являющаяся касательной реакцией. Геометрическая сумма N и F есть полная реакция R. Угол между R и N назовем углом трения, поскольку он зависит от силы трения F. При равномерном движении ползуна соблюдается условие P = F, где F = f N, откуда следует f = F / N. Из построения на рис. 3.16,а следует, что F / N = tg φ где φ = arctg f. При малом коэффициенте трения φ ≈ f. Так, например, при f = 0.2 φ = 0.2 рад ≈ 12˚.
Коэффициент трения определяется экспериментально на установке, схема которой показана на рис. 3.16,б. На плоскости, наклоненной к горизонту под углом α помещено тело. Установим условия, при которых тело будет покоиться на плоскости.
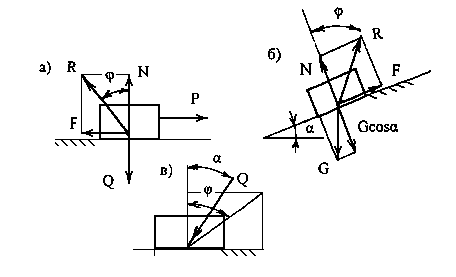
Рис 3.16. Трение в поступательной паре
Разложим силу тяжести на две составляющие – по нормали и по касательной к поверхности. Нормальная составляющая, равная G cos α, прижимает тело к плоскости, касательная составляющая, равная G sin α, стремится сдвинуть тело вниз по плоскости, Этой силе противодействует сила трения F = f G sin α. Условие равновесия тела на плоскости
F≥ G sin α
или
FG cos α ≥ G sin α f ≥ tg α tgφ ≥tg α φ ≥ α.
Равновесие тела на наклонной плоскости не зависит от величины силы. Такое состояние носит название самоторможения. Самоторможение часто используется в грузоподъемных механизмах.
Явление самоторможения наблюдается в поступательной паре, если к ползуну приложена сила Р под углом меньшим угла трения (рис. 3.13в). Доказательство этого то же, что и для тела на наклонной плоскости. Угол трения определяет конус трения. Если сила трения приложена внутри конуса трения, то она не может сдвинуть тело с места. Это следует учитывать при проектировании механизмов с поступательными парами.
Установленные зависимости используются для анализа трения в резьбе. На рис. 3.17 показан один виток прямоугольной резьбы. Согласно 3-му закону трения гайку можно заменить небольшим элементом, нагруженным теми же силами, что и гайка. В таком случае возникает аналогия с ползуном, перемещающимся по наклонной плоскости, где α – угол подъема винтовой нарезки.
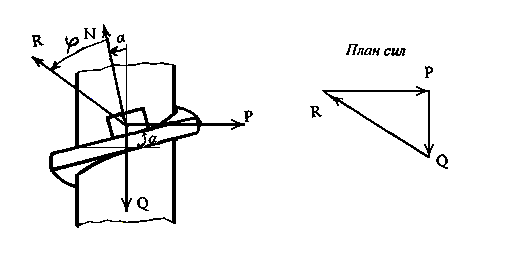
Рис 3.17. Трение в резьбе
Построим треугольник сил, приложенных к ползуну. Из треугольника следует
P = Q tg (α + φ).
Момент, который необходимо приложить к гайке, чтобы преодолеть силу Q, равен
M = P rср = Q rср tg (α+ φ),
где r ср - средний радиус резьбы.
Угол подъема α обычно принимается небольшим для обеспечения самоторможения гайки, угол трения φ = arc tg f0, где f0 - приведенный коэффициент трения. Для прямоугольной резьбы f0 = f, для треугольной резьбы f0 = f / cos 30˚.
3.18.Трение во вращательной паре.
Вращательная пара состоит из втулки и цапфы . Если к цапфе приложен движущий момент, она будет перекатываться по цилиндрической поверхности втулки до тех пор, пока реактивный момент не уравновесит движущий момент. На рис. 3.18 представлено положение равновесия цапфы. Из проекции всех сил на ось Y следует, что Q = - R, где Q - вертикальная нагрузка, R - полная реакция, Q и R образуют пару сил с плечом ρ, где ρ – радиус круга трения.
Mтр = Q ρ.

Рис.3.18. Трение во вращательной паре
Из построения на рис. 3.18 видно, что ρ = rц sin φ.
Поскольку sin φ ≈ tg φ, при малых значениях φ
Mтр = Q rц tg φ = Q rц f.
Коэффициент трения f для вращательной пары определяется экспериментально. Обычно он на 30% больше, чем для поступательной пары.
Здесь рассмотрен упрощенный подход к определению трения во вращательной паре, не учитывающий реального распределения удельного давления на поверхности кинематической пары. При более строгом подходе рассматриваются две гипотезы распределения давления, так называемые гипотеза постоянного давления и гипотеза постоянного износа. Первая относится к новым цапфам, а вторая – к приработавшимся цапфам. В результате получаются формулы, аналогичные вышезаписанным с приведенным коэффициентом трения 1.27 f для приработавшихся цапф и 1.47f для новых.
3.19. Трение в высшей паре.
В высшей кинематической паре имеет место скольжение и качение элементов друг по другу. Сила трения скольжения вычисляется также как и в поступательной паре. Сопротивление перекатыванию учитывается моментом трения качения, который направлен противоположно угловой скорости.
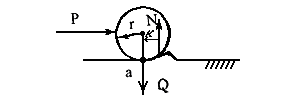
Рис 3.19. К определению трения качения в высшей паре
Физическая природа трения качения изучена недостаточно, поэтому обычно пользуются экспериментальными данными. При качении тела затрачивается работа, которая идет на деформацию поверхностей качения. Пусть, например, перекатывается цилиндр по плоскости (рис. 3.19). Перед цилиндром образуется волна деформации, которая движется вместе с ним. Равнодействующая элементарных реакций смещена от точки а на величину k. Для качения цилиндра необходимо преодолеть момент Мтр = kN = k Q, где Q – сила, приложенная к телу. Коэффициент пропорциональности в этой формуле, по аналогии с законом трения на плоскости, называют коэффициентом трения качения.
3.20. Динамический анализ механизмов. Приведение сил и масс.
Для того, чтобы выполнить силовое исследование, необходимо знать закон движения начального звена. Он устанавливается при решении задачи об истинном движении механизма. В этой задаче активные силы считаются известными, составляется уравнение, связывающее силы и ускорения, а затем путем их интегрирования находится скорость и перемещение как функции времени. Основные трудности здесь чисто математического характера. Они вызваны сложностью интегрирования нелинейного дифференциального уравнения. С целью упрощения записи дифференциального уравнения рассматривается одномассовая динамическая модель механизма. Вместо движения всего механизма изучается движение одного звена, так называемого звена приведения. Обычно за звено приведения выбирается начальное звено механизма. Для того, чтобы такая замена была возможна, необходимо, чтобы звено приведения было динамически эквивалентно всему механизму.
Условие динамической эквивалентности состоит в следующем: во – первых, кинетическая энергия звена приведения должна равняться кинетической энергии механизма; во – вторых, работа силы, приложенной к звену приведения, на возможном перемещении должна равняться сумме работ всех сил, приложенных к механизму, на их возможных перемещениях. Указанное условие вытекает из того, что при составлении уравнения движения механизма в расчет принимается только закон изменения кинетической энергии и внешних сил, а не реальная схема механизма. При такой замене и для механизма и для звена приведения справедливо одно и то же уравнение.
Кинетическая энергия механизма равна сумме кинетических энергий его звеньев. Для кривошипно-ползунного механизма (рис. 3.20) имеем
Eмех = Е1 + Е2 + Е3 ,
где E1 = I10 ω2/2 , E3 = m3 Vc2/2,
E2 = m2 VS2/2 + I2Sω22/2.
В качестве звена приведения можно выбрать ползун или кривошип. Приведенной массой называется такая условная масса звена приведения, при которой его кинетическая энергия равна кинетической энергии всего механизма.

Рис 3.20.Рычажный механизм и его динамические модели
Емех = Епр = mпр V2/2, откуда следует
Mпр = 2 Емех/V2 ,
где V – скорость звена приведения.
Приведенным моментом инерции звена приведения, при котором его кинетическая энергия равна кинетической энергии механизма.
Емех = Епр = Iпр ω2/2 , откуда следует
Iпр = 2 Емех / ω2, где ω – скорость звена приведения.
Приведенной силой Рпр называется такая условная сила, приложенная к звену приведения, работа которой на возможном перемещении равна сумме работ всех сил, приложенных к механизму, на их возможных перемещениях. По этому определению приведенная сила совпадает с обобщенной силой по Лагранжу. Размерность обобщенной силы зависит от размерности обобщенной координаты: [Q] = [A] [q]. Если обобщенная координата q измеряется в радианах, размерность обобщенной силы в Н·м и, следовательно, обобщенная сила выступает в виде приведенного момента Мпр. Эквивалентные динамические модели кривошипно-ползунного механизма представлены на рис. 3.17, для вращающегося звена приведения
Iпр = 2 (Ic ω12 / 2 + Is ω2 / 2 + m2 Vs2 + m3 VB2) / ω12. (3.9)
Из анализа формулы (3.9) следует, что Ιпр не зависит от скорости звена приведения, но зависит от обобщенной координаты.
Для зубчатого механизма (рис. 3.21) Ιпр является величиной постоянной:
Ιпр = 2 (Ι1 ω12 / 2 + І2 ω22/ 2+ І3 ω32/ 2 + I4 ω42 /2) / ω12.
Динамическое исследование механизмов, у которых Іпр = const, производится значительно проще.
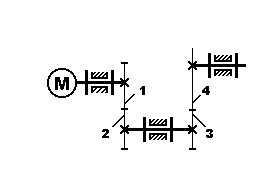
Рис 3.21.Зубчатый механизм.
3.21.Уравнение движения машины в дифференциальной форме
Для вывода уравнения движения машины воспользуемся уравнением Лагранжа 2-го рода:
d /dt (ðE / ðq ) - ðE/ðq = Q , (3.10)
где q и q - обобщенная координата и обобщенная скорость;E - кинетическая энергия; Q - обобщенная сила.
Применим это уравнение к динамической модели на рис. 3.17. Тогда q = φ, q = ω, Q = Mпр, E = Iпрω2 / 2 , Iпр = f ( φ ) .
Определим элементы уравнения (3.10):
ðE / ðφ = ω2 ( ðIпр / ðφ ) / 2;
ðE / ðω = Iпр ω .
Примем во внимание, что Iпр и ω изменяются во времени, тогда
d/dt (ðE/ðω) = ω(dIпр/dt) + Iпр (dω/dt) = ω2 (dIпр/dφ) + Iпр ε .
Подставим полученные результаты в уравнение ( 3.10 ). Получим уравнение движения механизма в дифференциальной форме:
Iпр + 2 ( d Iпр / d ) / 2 = Mпр . ( 3.11 )
Это нелинейное неоднородное дифференциальное уравнение 2-го порядка. Решение дифференциального уравнения – это отыскание первообразной функции. Способ решения зависит от вида Mпр и Іпр. Встречаются следующие случаи:
1. Iпр = const , Mпр = const ;
2. Iпр = const , M = M (φ) или M (ω) или M (t);
3. I = I (φ) , M = M (φ) ;
4. I = const , M = M (ω, φ) ;
5. I = I (φ), M = M (ω, φ) .
В первых двух случаях уравнение движения может быть проинтегрировано в конечном виде. Иногда можно воспользоваться готовым решением, взятым из справочника. Любое дифференциальное уравнение можно решить численным методом.
3.22. Пример динамического исследования колодочного тормоза.
Рассмотрим простейший случай, когда Iпр = const, Mпр = const, на примере колодочного тормоза, который состоит из диска и рычага с тормозной колодкой (рис. 3.22). Диск, вращающийся с угловой скоростью ω, затормаживается силой трения, возникающей при приложении к рычагу силы Р. Требуется установить время и число оборотов до полной остановки диска.
Пусть Iпр = 0.4 кгм2, Р = 20 Н, f = 0.2, R = 0.1 м, ω = 100 рад/с.
К диску приложен тормозной момент
Mтр = Fтр R = f N R = f 2 P R = 0.8 Н м
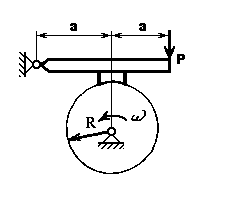
Рис 3.22. Колодочный тормоз.
С учетом того, что Iпр = const, уравнение (3.11) запишется так:
Iпр ε = М пр, где Мпр = - Мтр
Здесь ε = const, имеет место равноускоренное движение. Перепишем уравнение, разделив переменные и проинтегрировав. Опуская элементарные преобразования, в итоге получим уравнение
ω = -(Мпр / Iпр) t + C1, (3.12)
где С1 - постоянная интегрирования, которая находится из начальных условий: при t = 0, ω = ω0, тогда С1 = ω0 .
После интегрирования уравнения (3.12) получим
φ = -(Мпр / Iпр) t2 / 2 + ω0 t + C2, (3.13)
где С2 - постоянная интегрирования, которая находится из начальных условий:
при t = 0 φ0 = 0 , тогда С2 = φ0 .
Из уравнения (3.13) можно определить время до полной остановки:
0 = - (0.8/ 0.4) t + 100 → t = 50 c.
Из уравнения (3.13) находится угол поворота диска до полной остановки:
φ = - (0.8 / 0.4) 502 /2 + 100 50 = 2500 рад = 398 об.
3.23. Численное решение дифференциального уравнения.
Полученные выше формулы (3.12) и (3.13) лежат в основе численных методов решения дифференциальных уравнений. Сущность простейшего из них состоит в следующем. Весь период движения разбивается на столь малые интервалы времени, что Iпр и Мпр не успевают существенно измениться. Тогда будут справедливы формулы (3.12) и (3.13) для равноускоренного движения.
По ним вычисляются значения обобщенной координаты и обобщенной скорости в конце интервала и устанавливаются истинные значения Iпр и Мпр. Полученные значения являются исходными для отсчета движения на следующем интервале и так далее. С помощью усовершенствованных методов (например, метода Рунге –Кутта) можно добиться практически любой точности расчета. В связи с большим объемом вычислений для решения дифференциальных уравнений используются ЭВМ. В библиотеках ЭВМ имеются стандартные программы для решения дифференциальных уравнений, так что задача программирования сводится только к записи уравнения и задания начальных условий, а также указанию требуемой точности расчета или шага интегрирования.
3.24. Периоды работы машины
Уравнение движения машины (3.11) можно представить в более простой и удобной для качественного анализа форме – в форме кинетической энергии. Преобразуем угловое ускорение
ε = dω/dt = ω dω/dt ω = d(ω2)/2 dt ω =d (ω2/2) dt/(dt dφ )= d(ω2/2)/dφ
Подставим полученное выражение в уравнение (3.11):
Iпр = d (ω2 /2)/dφ + ω2d Iпр/2 dφ = d Iпр ω2 / 2 dφ = Mпр
откуда
dE = Mпр dφ. (3.14)
Уравнение (3.14) выражает теорему об изменении кинетической энергии: приращение кинетической энергии системы равно работе внешних сил. Уравнение (3.14) эквивалентно следующему:
Ap - Aq - AF + AG = E2 - E1 , (3.15)
где АР - работа движущих сил; AQ - работа сил полезных сопротивлений; AF - работа сил трения; AG - работа сил тяжести (для механизма, работающего в циклическом режиме AG = 0); E2 , E1 - кинетическая энергия машины в двух рассматриваемых положениях.
Уравнение (3.15) выражает баланс энергии и работы в машине: если работа движущих сил превышает работу сил трения и полезного сопротивления, кинетическая энергия возрастает, машина разгоняется, если работа движущих сил меньше работы сил сопротивления, движение происходит за счет расхода накопленной кинетической энергии.
При работе машины следует различать три периода.
Период пуска характеризуется тем, что AQ = 0 E1 = 0. Тогда
AP - AF = E2 , Ap = AF + E2 .
Работа движущей силы при пуске расходуется на преодоление трения и разгон машины. Чем меньше AF, тем быстрее происходит разгон.
Для периода установившегося движения E2=E1, тогда
AP - AQ - AF = 0 , AP = AQ + AF .
Работа движущей силы при установившемся движении расходуется на полезную работу и работу сил трения. Разделим последнее уравнение на AP:
1 = AQ/AP + AF/AP = + ,
где - коэффициент полезного действия (к.п.д.); - коэффициент потерь.
Определенный таким образом к.п.д. носит название циклового к.п.д.
Мгновенный к.п.д. определяется как отношение мощности сил полезного сопротивления к мощности движущей силы, определенной с учетом сил трения, но без учета сил инерции.
К.п.д. характеризует совершенство механизма с точки зрения экономного расходования энергии. Работа сил трения превращается в тепловую энергию и представляет безвозвратные потери. К.п.д. можно повысить за счет уменьшения потерь на трение.
Третий период работы машины - выбег, для него E2 = 0, AP = 0
- AQ - AF = - E .
В этот период кинетическая энергия расходуется на работу сил полезного сопротивления и работу сил трения. Для того чтобы уменьшить продолжительность выбега, вводят дополнительное торможение.
3.25. Регулирование неравномерности хода машины
Три периода движения машины, отнесенные к главному валу машины, представлены графически на рис.3.23. В течение цикла угловая скорость главного вала достигает максимального и минимального значения, оставаясь вблизи некоторого среднего значения ср.
ср = (max + min) / 2 . (3.16)
Степень отклонения скорости от среднего значения характеризуется коэффициентом неравномерности хода машины:
= ( max - min ) / ср . ( 3.17)
Из формул (3.16) и (3.17) следует:
(1 + 0.5 ) ср = max ;
(1 – 0.5 ) ср = min .
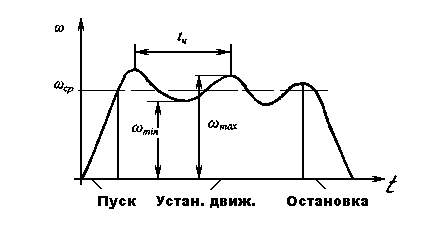
Рис. 3.23. График угловой скорости главного вала машины
Коэффициент неравномерности для различных классов машин колеблется в широких пределах. Экспериментально установлены следующие значения :
электрические генераторы - 1/ 300 – 1 / 150;
двигатели внутреннего сгорания –1 / 80 – 1 / 150;
металлорежущие станки - 1 / 20 – 1 / 50;
сельхозмашины - 1 / 10 – 1 / 50;
прессы , ножницы - 1 / 5 – 1 / 20.
Неравномерность хода машины можно уменьшить с помощью маховика. Маховиком называется звено в форме диска или обода со спицами, обладающее большим моментом инерции.
Рассмотрим периоды движения, когда скорость машины изменяется от max до min . Запишем уравнение (3.15) в виде
Аизб = Еmax – Emin ,
где Аизб = АР – АQ – AF.
При наличии маховика около 90 всей кинетической энергии машины сосредоточено в нем. Тогда
Аизб = IM 2max / 2 – IM 2min / 2 =
IM ( max + min ) ( max - min ) / 2=IM 2ср , (3.18) откуда
= Аизб / 2cр IM . (3.19)
Из анализа формулы (3.19) следует, что с увеличением момента инерции маховика коэффициент неравномерности хода машины уменьшается. Задаваясь допустимой неравномерностью хода, найдем требуемый момент инерции маховика. Предварительно нужно определить избыточную работу за период, когда угловая скорость кривошипа изменяется от максимума до минимума.
Момент инерции маховика связан с его массой и размерами зависимостью IM = m R2ср, где Rср - средний радиус обода маховика. Обычно задаются радиусом Rср, исходя из допустимой по условию прочности обода скорости внешних точек обода маховика: Vmax ≤ 70 –120 м/с для стальных маховиков; Vmax ≤ 45 – 90 м / с для чугунных маховиков. Для увеличения прочности маховики в последнее время стали делать намотанными из проволоки или стальной ленты.
Размеры маховика зависят от места его установки, поэтому стремятся его устанавливать на быстроходном валу машины.
В некоторых случаях маховики используются как аккумуляторы энергии. Такое применение они находят, например, в маховичных двигателях, гировозах, прессах и т.д.
3.26. Автоматические регуляторы скорости.
Назначение автоматических регуляторов - поддержание скорости машины в заданных пределах при периодическом или случайном изменении нагрузки. Некоторые машины, например асинхронные электродвигатели, обладают свойством саморегулирования. Турбины, двигатели внутреннего сгорания этим свойством не обладают и при уменьшении нагрузки могут пойти в разнос. Чтобы этого не произошло, они снабжаются автоматическими регуляторами.
На рис.3.24 представлена схема центробежного регулятора прямого действия. При увеличении угловой скорости вала регулятора его ползун перемещается вверх. Связанная с ним дроссельная заслонка перекрывает трубопровод с паром или топливной смесью, что ведет к снижению скорости машины. Если угловая скорость вала регулятора уменьшается, дроссельная заслонка увеличивает проходное сечение, что ведет к возрастанию скорости машины.
Вследствие инерционности регулятора возникает колебательный процесс. В правильно спроектированном регуляторе он быстро затухает (рис.3.25,а). Это качество системы регулирования называется устойчивостью. Если система неустойчива, амплитуда колебаний возрастает до бесконечности (рис.3.25,б).
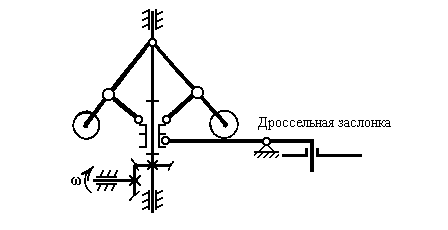
Рис. 3.24. Центробежный регулятор Уатта
Из рассмотрения условия статического равновесия регулятора (рис.3.25,в) следует, что в положении, определенном обобщенной координатой φ, на груз действует горизонтальная сила Р. Зависимость силы Р от радиуса центра груза представляет статическую характеристику регулятора. Эта характеристика определяется экспериментально.

Рис.3.25. Характеристки центробежного регулятора
При вращении грузов возникает сила инерции U. Сила инерции линейно зависит от радиуса (U = m ω2 r) и ее график – прямая линия. Точка пересечения графика силы инерции и характеристики регулятора определяет радиус центра грузов в положении равновесия.
Пусть характеристика имеет вид кривой «а» (рис.3.25, г) и регулятор находится в равновесном состоянии при угловой скорости ω1. По каким-то случайным причинам радиус r получил положительное приращение ∆ r. В новом положении а1 сила Р больше силы U, следовательно, грузы переместятся в направлении силы Р, т.е. к точке а. Если радиус получил отрицательное приращение (- ∆ r), то в положении а2 сила инерции U больше силы Р – грузы переместятся в направлении силы U, т.е. снова к точке а.
Таким образом, установлено, что характеристика «а» устойчивая. Из аналогичных рассуждений следует, что характеристика «б» неустойчивая.
Характеристики реальных регуляторов состоят из участков устойчивости и неустойчивости. Поэтому используется не вся характеристика, а только ее устойчивая часть. Для этого регулятор снабжают ограничительными упорами.
Помимо статической устойчивости следует рассмотреть и динамическую устойчивость. Для этого нужно исследовать соответствующее дифференциальное уравнение на устойчивость. Эта сложная с математической стороны задача изучается в специальном курсе теории автоматического регулирования.
3.27. Одномассовая упругая модель механизма
Более точно свойства механической системы описываются с помощью динамической модели, учитывающей упругость звеньев. Исследование упругих свойств механизма следует начинать с изучения простейшей одномассовой динамической модели. К такой модели, в частности, сводится динамическая система силового модуля. Динамическую модель механизма можно рассматривать как совокупность таких одномассовых моделей.
Динамическая модель колебательной системы с одной степенью свободы представлена на рис.3.26,a. Этот случай возможен, если деформации подчинены закону Гука ( F = cq ), а сила трения пропорциональна скорости (Ф = k q′ ) .
Физическая природа механических колебаний связана с упругоинерционными свойствами твердых тел. При выведении системы из равновесного состояния возникает упругая сила, стремящаяся возвратить исходное состояние. Под действием этой силы тело начинает двигаться к положению равновесия, но по причине инерционности "проскакивает" его и движется дальше. При этом знак упругой силы меняется, тело постепенно останавливается, а затем, двигаясь в направлении равновесия, снова "проскакивает" его и т.д. Этим свойством обладают не только твердые тела, но и системы с кинематическими связями, т.е. механизмы и машины.
Математической моделью динамической системы служит дифференциальное уравнение. Линейным колебательным системам соответствуют линейные дифференциальные уравнения с постоянными коэффициентами. Уравнение движения массы т (рис.3.26,a) получается из уравнения Ньютона:
mq″ + kq′ + cq = F(t ).
Обычно его представляют в виде
q″ + 2 β q′ + ω2 q = k x(t) , (3.20)
где β - коэффициент демпфирования β = k/2m; ω - собственная частота при отсутствии демпфирования; k - передаточный коэффициент; q - обобщенная координата (выходная величина); x(t)- некоторая функция времени (входная величина).
При свободных колебаниях и отсутствии вязкого трения уравнение (3.20) принимает вид
q″ + ω2 q = 0 .
Его решением служит функция
![]()
где q и q0′ - начальные условия при t = 0.
Таким образом, движение представляется суммой двух гармонических колебаний с амплитудами q0 и q0′ / ω и одинаковой частотой ω. Его можно представить одним гармоническим движением:
q = A cos (ωt + φ ),
где
![]() ,
φ = arctg (q0′
/ (ωq0))
.
,
φ = arctg (q0′
/ (ωq0))
.
При свободных колебаниях с демпфированием уравнение (3.20) имеет вид
![]() .
.
Его решением служит функция

где
![]() - собственная частота с учетом
демпфирования, при малом демпфировании
- собственная частота с учетом
демпфирования, при малом демпфировании
![]() .
.

Рис. 3.26. Динамическая модель колебательной системы с одной степенью свободы ( а ), колебательный процесс с одной степенью свободы ( б )
В выражении (3.21) амплитуда колебаний
![]() представляет убывающую экспоненциальную
функцию, что указывает на затухание
свободных колебаний с течением времени.
Быстрота затухания зависит от коэффициента
демпфирования
представляет убывающую экспоненциальную
функцию, что указывает на затухание
свободных колебаний с течением времени.
Быстрота затухания зависит от коэффициента
демпфирования
![]() .
При большом демпфировании движение
превращается в быстро затухающий
апериодический процесс (рис.3.26). По
периоду колебания Т и амплитудам
.
При большом демпфировании движение
превращается в быстро затухающий
апериодический процесс (рис.3.26). По
периоду колебания Т и амплитудам
![]() и
и
![]() можно вычислить логарифмический
декремент затухания
можно вычислить логарифмический
декремент затухания
![]() ,
а затем коэффициент демпфирования
,
а затем коэффициент демпфирования
![]() .
.
Рассмотрим случай колебаний без демпфирования с гармоническим возбуждением. Тогда уравнение движения представится в виде
![]()
а его решение функций
![]()
Первые два слагаемые описывают свободные колебания с частотой ω. При наличии хотя бы малого демпфирования они постепенно затухают. Третье слагаемое характеризует установившийся режим вынужденных колебаний, которые происходят по гармоническому закону с частотой, равной частоте возбуждения, и амплитудой
![]()
Амплитуда А увеличивается по мере
приближения частоты возбуждения
![]() к собственной частоте
к собственной частоте
![]() .
Когда
.
Когда
![]() ,
наступает резонанс. Однако в связи с
присутствием демпфирующего элемента
амплитуда не достигает бесконечно
большого значения.
,
наступает резонанс. Однако в связи с
присутствием демпфирующего элемента
амплитуда не достигает бесконечно
большого значения.
Коэффициентом динамичности называется
отношение амплитуды вынужденных
колебаний к максимальному перемещению,
вызываемому статическим действием
силы. Из уравнения (3.22) следует, что при
статическом приложении силы
![]() .
Следовательно, отношение амплитуд
.
Следовательно, отношение амплитуд
![]()
На рис.3.27 показано изменение абсолютного
значения коэффициента динамичности в
зависимости от отношения
![]() .
При малых значениях
,
т.е. в случае, когда частота возмущающей
силы мала по сравнению с частотой
свободных колебаний, коэффициент
динамичности близок к единице и
перемещения такие же, как при статическом
действии силы. Коэффициент динамичности
возрастает при приближении к резонансу.
В случае перехода через резонанс
коэффициент динамичности уменьшается
и при соотношении
.
При малых значениях
,
т.е. в случае, когда частота возмущающей
силы мала по сравнению с частотой
свободных колебаний, коэффициент
динамичности близок к единице и
перемещения такие же, как при статическом
действии силы. Коэффициент динамичности
возрастает при приближении к резонансу.
В случае перехода через резонанс
коэффициент динамичности уменьшается
и при соотношении
![]() вновь становится равным единице. При
дальнейшем увеличении частоты p
он уменьшается, приближаясь к нулю. Это
означает, что если возбуждение происходит
с высокой частотой по отношению к
собственной частоте, то колебания малы
и тело можно считать неподвижным.
вновь становится равным единице. При
дальнейшем увеличении частоты p
он уменьшается, приближаясь к нулю. Это
означает, что если возбуждение происходит
с высокой частотой по отношению к
собственной частоте, то колебания малы
и тело можно считать неподвижным.
Динамическая система силового модуля состоит из ротора двигателя, редуктора, соединительного вала, исполнительного звена. Предположим, что упругие и демпфирующие свойства системы сосредоточены в соединительном звене.
Это двухмассовая динамическая система, соединенная упругим валом (рис. 3.28), характеризуется системой уравнений:
![]()
где
![]() - момент инерции двигателя и редуктора,
приведенный к выходу редуктора;
- момент инерции двигателя и редуктора,
приведенный к выходу редуктора;
![]() - угол поворота выходного вала
редуктора:
- угол поворота выходного вала
редуктора:
![]() ;
;
![]() -коэффициент вязкого трения ;
-коэффициент вязкого трения ;
![]() - угол поворота исполнительного звена;
- угол поворота исполнительного звена;
![]() - коэффициент жесткости упругого вала;
- коэффициент жесткости упругого вала;
![]() - момент, развиваемый двигателем,
приведенный к выходу редуктора:
- момент, развиваемый двигателем,
приведенный к выходу редуктора:
![]() ;
;
![]() - момент инерции исполнительного звена;
- момент инерции исполнительного звена;
![]() - момент внешних сил, приложенных к
исполнительному звену.
- момент внешних сил, приложенных к
исполнительному звену.
Введем новую переменную:
![]() .
.
Кроме того, предположим, что у двигателя
жесткая характеристика и его ротор
вращается с постоянной угловой скоростью.
Тогда
![]() и второе уравнение (3.23) имеет
и второе уравнение (3.23) имеет
![]()
Это уравнение можно было бы получить
сразу, если рассматривать ротор двигателя
заторможенным, а за
![]() принять координату, определяющую малые
перемещения исполнительного органа
относительно положения равновесия.
принять координату, определяющую малые
перемещения исполнительного органа
относительно положения равновесия.
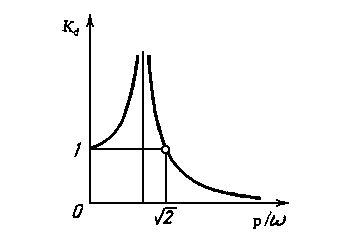
Рис.3.27. Зависимость коэффициента динамичности от р/ω
Уравнение (3.24) является уравнением движения колебательного типа. В таком случае силовой модуль представляет колебательную систему с одной степенью свободы.
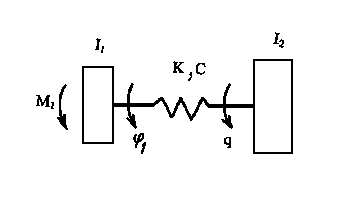
Рис.3.28. Двухмассовая динамическая модель
Колебательное движение накладывается на основное движение исполнительного звена, искажая его. Зная частоту и амплитуду колебаний, можно оценить точность его перемещения.
3.28. Характеристики упругих звеньев
При построении упругой модели манипулятора необходимо знать упругие характеристики его элементов. Как уже отмечалось, наибольшее значение имеют упругие свойства передаточных механизмов, в состав которых входят валы, зубчатые колеса, стержни, работающие на сжатие-растяжение, шпонки и шлицевые соединения и т.п.
Рассмотрим вал, работающий на кручение.
Представим, что левый его конец закреплен,
а к правому приложен крутящий момент
М. Под действием этого момента правый
конец вала повернется на угол закручивания
![]() .
При малых деформациях угол
пропорционален моменту М. Отношение
.
При малых деформациях угол
пропорционален моменту М. Отношение
![]() называется коэффициентом жесткости
(жесткостью) упругого вала, а
называется коэффициентом жесткости
(жесткостью) упругого вала, а
![]() - коэффициентом податливости (податливостью)
вала. Для вала постоянного сечения
- коэффициентом податливости (податливостью)
вала. Для вала постоянного сечения
![]()
где
- жесткость,
![]() ;
;
![]() — диаметр вала;
— диаметр вала;
![]() — модуль сдвига, для стали
— модуль сдвига, для стали
![]() — длина вала.
— длина вала.
Податливость вала является величиной,
обратной жесткости. Если вал ступенчатый,
податливости складываются, а общая
жесткость определяется как величина,
обратная суммарной податливости. Так,
например, для вала, имеющего два участка
с коэффициентами жесткости
![]() и
и
![]() ,
общий коэффициент жесткости
,
общий коэффициент жесткости
![]()
Жесткость зубчатой передачи определяется
следующим образом. Если закрепить
ступицу шестерни, а к зубчатому колесу
приложить момент
![]() ,
то вследствие контактной и изгибной
деформации зубьев, а также деформации
ободов обоих колес зубчатое колесо
повернется на некоторый угол
,
то вследствие контактной и изгибной
деформации зубьев, а также деформации
ободов обоих колес зубчатое колесо
повернется на некоторый угол
![]() .
Отношение
.
Отношение
![]() называется жесткостью зубчатой передачи,
приведенной к зубчатому колесу. Жесткость
зубчатой передачи, приведенная к
шестерне, в
называется жесткостью зубчатой передачи,
приведенной к зубчатому колесу. Жесткость
зубчатой передачи, приведенная к
шестерне, в
![]() раз меньше, так как
раз меньше, так как
![]() ,
где
,
где
![]() — передаточное отношение от шестерни
к колесу.
— передаточное отношение от шестерни
к колесу.
Для вычисления жесткости цилиндрической передачи можно пользоваться эмпирической формулой
![]()
где с — жесткость,
;
— коэффициент пропорциональности,
для стальных колес
![]() — диаметр колеса, к которому приводится
жесткость;
— диаметр колеса, к которому приводится
жесткость;
![]() — ширина зубчатого венца.
— ширина зубчатого венца.
Жесткость зубчатых передач обычно намного выше жесткости валов, на которых они установлены.
Жесткость винтовой нарезки в продольном направлении определяется по формуле
![]()
где с — жесткость,
![]() ;
— коэффициент пропорциональности,
для стального винта и стальной гайки
;
— коэффициент пропорциональности,
для стального винта и стальной гайки
![]() ;
;
![]() — площадь поверхности одного витка.
— площадь поверхности одного витка.
Жесткость стержня, работающего на растяжение-сжатие,
![]()
где с — жесткость,
;
![]() - модуль продольной упругости, для стали
- модуль продольной упругости, для стали
![]() ;
;
![]() — площадь поперечного сечения;
— площадь поперечного сечения;
![]() — длина стержня.
— длина стержня.
Жесткость упругих элементов — шпоночных соединений, муфт, цепных и реечных передач — можно найти в справочной литературе.
Для упрощения динамических моделей часто пользуются приемом приведения, заменяя системы звеньев, целые механизмы одним звеном — звеном приведения. Чтобы такая замена была возможна, звено приведения должно быть динамически эквивалентным заменяемому механизму.
Приведенным моментом инерции механизма называется условный момент инерции звена приведения, при котором его кинетическая энергия равна кинетической энергии всего механизма. Для зубчатого механизма (рис.3.26), у которого звеном приведения является звено 1, приведенный момент инерции определяется по формуле

где
![]() - моменты инерции колес, включая моменты
инерции валов;
- моменты инерции колес, включая моменты
инерции валов;
![]() - передаточные отношения от звена 1 к
звену
- передаточные отношения от звена 1 к
звену
![]() .
.
Момент инерции зубчатого механизма — величина постоянная.

Рис. 3.29. Схема зубчатого механизма
Для плоской рычажной системы (рис. 3.27), которая может служить в качестве исполнительного органа манипулятора, приведенный момент инерции

где
![]() - момент инерции звена 2 относительно
центра масс;
- момент инерции звена 2 относительно
центра масс;
![]() - абсолютная угловая скорость звена 2;
- абсолютная угловая скорость звена 2;
![]() - линейная скорость центра масс.
- линейная скорость центра масс.
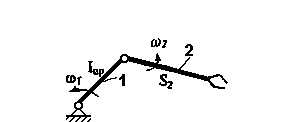
Рис. 3.30. Рычажный механизм
Приведенный момент инерции такого механизма – величина переменная, так как кинетическая энергия зависит от конфигурации системы.
Приведенным моментом называется условный
момент, приложенный к звену приведения,
работа которого на возможном перемещении
равна сумме работ всех реальных внешних
моментов, приложенных к звеньям на их
возможных перемещениях. Очевидно, что
для зубчатого механизма (см.рис.3.26), к
выходному валу котрого приложен внешний
момент
![]() ,
приведенный момент для звена приведения
1
,
приведенный момент для звена приведения
1
![]() ,
где
,
где
![]() - передаточное отношение. Здесь
- передаточное отношение. Здесь
![]() - постоянная величина. Для рычажного
механизма (см.рис.3.27) приведенный момент
зависит от конфигурации системы.
- постоянная величина. Для рычажного
механизма (см.рис.3.27) приведенный момент
зависит от конфигурации системы.
Приведенным коэффициентом жесткости
![]() механизма называется жесткость звена
приведения, имеющего ту же потенциальную
энергию, что и весь механизм. Для зубчатого
механизма это условие имеет вид :
механизма называется жесткость звена
приведения, имеющего ту же потенциальную
энергию, что и весь механизм. Для зубчатого
механизма это условие имеет вид :
![]()
Пусть вал ротора двигателя (см.рис.3.26)
закреплен, а к исполнительному звену
приложен момент М. Вследствие
податливости упругих элементов вал
исполнительного звена повернется.
Полный угол его поворота
![]() равен сумме углов поворотов, вызываемых
податливостью каждого упругого элемента,
приведенных к валу исполнительного
звена:
равен сумме углов поворотов, вызываемых
податливостью каждого упругого элемента,
приведенных к валу исполнительного
звена:
![]()
Под действием внешнего момента
вал 4—5 повернется относительно
звена 4 на угол
![]() .
Податливость зубчатой передачи 3—4
вызовет поворот колеса 4 на угол
.
Податливость зубчатой передачи 3—4
вызовет поворот колеса 4 на угол
![]() ,
где
,
где
![]() — жесткость зубчатой передачи, приведенная
к валу колеса 4. Вал 2—3 нагружен
моментом
— жесткость зубчатой передачи, приведенная
к валу колеса 4. Вал 2—3 нагружен
моментом
![]() ,
где
,
где
![]() — передаточное отношение зубчатой
передачи 3—4. Под действием этого
момента вал закрутится на угол
— передаточное отношение зубчатой
передачи 3—4. Под действием этого
момента вал закрутится на угол
![]() ,
что вызовет поворот звена 5 на угол
,
что вызовет поворот звена 5 на угол
![]() .
Рассматривая податливость зубчатой
передачи 1 –2 и вала 0 –1 , найдем
приведенные углы поворота:
.
Рассматривая податливость зубчатой
передачи 1 –2 и вала 0 –1 , найдем
приведенные углы поворота:
![]()
Произведя подстановку в выражение (3.25) находим полный угол поворота звена 5:
![]()
Жесткость механизма в целом, приведенная к валу исполнительного органа,

Отсюда следует, что податливость первых ступеней зубчатого механизма мало влияет на общую его податливость. Наибольшее значение имеет податливость элементов, ближайших к последней ступени редуктора и соединительного вала. Поэтому при конструировании зубчатых механизмов в первую очередь увеличивают жесткость выходных звеньев редуктора. Это служит объяснением тому, что при построении динамических моделей исполнительные звенья и редукторы считаются абсолютно жесткими, а податливость сосредоточивается в упругих соединительных валах.
В реальных механизмах всегда имеют место потери, связанные с внутренним трением, возникающим между микроэлементами материала при его деформировании, а также потери конструкционного демпфирования, вызванные трением на поверхности сопряжения деталей. Возникающие при этом силы трения называются диссипативными. Их значения пропорциональны скорости деформации элементов. Эти силы аналогичны силам, возникающим при движении тела в вязкой среде с малой скоростью при проталкивании движущимся телом жидкости через узкие каналы, как в случае амортизаторов. Поэтому силы трения, пропорциональные скоростям, принято называть силами вязкого трения или силами демпфирования. Для их определения вводятся коэффициенты вязкого трения, значения которых устанавливаются экспериментально.
Приведенный коэффициент вязкого трения для механизма в целом находится из условия равенства рассеивания энергии в отдельных упругих элементах рассеиванию энергии, которое имеет место в звене приведения. Зная коэффициенты вязкого трения упругих элементов, приведенный коэффициент можно определить по формуле, аналогичной выражению (3.26).
Контрольные вопросы
Какие задачи решает динамика машин?
Что такое сила инерции?
Как формулируется принцип Даламбера для механизмов? В чем состоит причина его использования при решении динамических задач для механизмов?
Как учитываются силы инерции при вращательном движении? Что такое момент инерции тела?
В чем состоит идея метода планов сил?
На чем базируется метод рычага Жуковского? Что на самом деле представляет этот рычаг?
Что такое ротор и почему его следует уравновешивать ?
Как практически осуществляется балансировка роторов?
Какие законы трения принмаются во внимание при исследовании механизмов?
Что такое самоторможение и как оно проявляется в некоторых механизмах?
Что такое звено приведения механизма? Для чего вводится это понятие ?