

7.Основы теории машин – автоматов
7.1. Основные понятия теории машин – автоматов
Машина – автомат есть устройство, в котором все преобразования энергии, материалов и информации осуществляются без участия человека. Так, например, в станках – автоматах все рабочие и вспомогательные движения выполняются без участия человека. После выполнения совокупности движений устройство приходит в точно такое же состояние, в котором оно находилось перед их началом. Эта совокупность движений называется циклом. Машина – автомат выполняет цикл за циклом самостоятельно. Машина – полуавтомат требует вмешательства человека на границах цикла, например, для съема или установки детали.
Совокупность машин – автоматов, предназначенная для выполнения определенного технологического процесса, называется автоматической линией. Обычно кроме основного технологического оборудования в нее входят транспортные и другие вспомогательные устройства. Участие человека в работе автоматических линий состоит лишь в контроле за работой линий, наладке, устранению неисправностей.
Основная сфера применения автоматов и автоматических линий – массовое и крупносерийное производство, т.к. переналадка их на новое изделие требует материальных затрат и времени.
Машина – автомат состоит из одного или нескольких исполнительных органов, непосредственно воздействующих на обрабатываемый предмет, и блока управления, вырабатывающего управляющие воздействия на исполнительные органы. Источник, из которого блок управления черпает информацию, называется программой. Программа – это совокупность команд, которые должны быть выполнены для обеспечения требуемого технологического процесса. Программа разрабатывается заранее на основании проекта технологического процесса. Она физически реализуется на программоносителе.
7.2. Аналоговые системы управления
Существуют два принципиально различных способа задания программы: в аналоговом и в цифровом виде. Программа в аналоговом виде задается профилем кулачков, копиров, расстановкой упоров и конечных выключателей. Например, в приводе суппорта токарного станка – автомата имеется кулачковый механизм и зубчато – реечная передача, преобразующая поворот коромысла в поступательное движение суппорта (рис. 7.1).
На кулачке имеется участок быстрого подвода инструмента АВ и быстрого удаления СД, которые обычно выполняются по параболе, и участок рабочей подачи ВС. Так как обычно подача равномерная, участок ВС представляет спираль Архимеда.
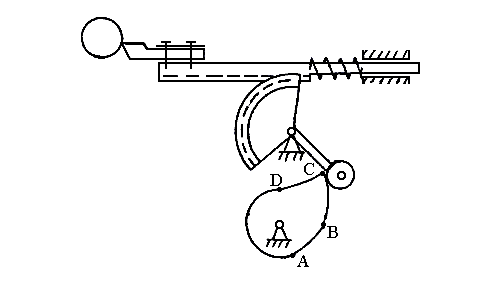
Рис. 7.1. Управление от кулачков
Кулачок является не только программоносителем аналогового типа, но и механизмом привода исполнительного органа, в данном случае – суппорта. Задаваясь различным профилем кулачка, можно получать различные законы движения исполнительного органа. Достоинства системы управления с кулачками – простота устройства, высокая точность. Недостатки – высокая стоимость изготовления кулачков и недостаточная долговечность, вследствие больших нагрузок на кулачок.
Другой способ задания программы в аналоговом виде – от копиров. Он обычно применяется при обработке деталей со сложным профилем типа кулачков, турбинных лопаток и т. д. На рис 7.2 представлена схема обработки фасонной цилиндрической поверхности по способу непосредственного копирования.
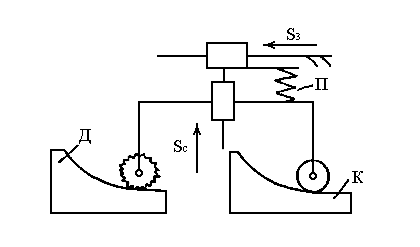
Рис.7.2.Управление от копиров
Стол фрезерного станка получает задающую подачу Sз. В результате обкатывания ролика – щупа по поверхности копира К возникает следящая подача Sс. Режущий инструмент полностью копирует движение щупа. Недостаток этого способа состоит в том, что для создания большого усилия резания пружина П должна быть достаточно мощной. А это вызывает большие нагрузки на щуп и копир, снижающие их долговечность. Этот недостаток устраняется, если применить следящий привод.
Принцип действия следящего привода поясняется схемой на рис. 7.3. Отличие от предыдущей схемы состоит в том, что усилие резания создается не пружиной, а силовым гидроцилиндром, питаемым от гидронасоса через сервоклапан.

Рис. 7.3. Следящий привод
Управление сервоклапаном осуществляется от копира посредством щупа. Сервоклапан выполнен так, что при одинаковых расстояниях фрезы и щупа от корпуса гидроцилиндра, пояски клапана перекрывают каналы, связывающие поршневую и штоковую полость силового гидроцилиндра. При появлении задающей подачи Sз щуп под действием копира перемещается вверх и сообщает штоковую полость с напорной магистралью, а поршневую – со сливной магистралью. Вследствие этого корпус гидроцилиндра, а вместе с ним и фреза, переместятся вверх на некоторую величину. Движение корпуса прекратится как только сервоклапан перекроет каналы, питающие гидроцилиндр. Процесс слежения всегда характеризуется некоторым запаздыванием подъема гидроцилиндра, вызывающим погрешность слежения. Надлежащим выбором параметров системы эту погрешность, а также колебания, возникающие из-за инерционности системы, можно свести к минимуму.

Рис. 7.4. Система управления по упорам
Наиболее простой является система управления по упорам. В качестве программоносителя выступает линейка или вращающийся барабан с закрепленными на них в определенных местах упорами. Эти упоры воздействуют на концевые выключатели, которые вырабатываю соответствующие сигналы и посылают их в систему управления. Например, с помощью упоров можно составить программу управления обработкой на токарном станке ступенчатого валика (рис. 7.4). Сигнал, вырабатываемый концевым выключателем, управляет поперечной подачей Sп.
Эта система широко применяется в автоматических линиях, в автооператорах, входит в состав систем блокировок и сигнализации различных устройств. Она конструктивно проста, универсальна, обеспечивает дистанционное управление, легко переналаживается.